

Скорости: а - принципиальная электрическая схема;
б – графики изменения скорости (ЭДС якоря Eя)
И напряжения Uя во времени
Контакторы настроены на различные напряжения, а значит и скорости срабатывания изменением величины начального воздушного зазора, натяжения возвратной пружины или включением последовательно с катушками дополнительных резисторов (на схеме не показаны).
Пуск электродвигателя начинается с включения линейного контактора КМ0 (как это рассматривалось ранее) при полностью введенном пусковом реостате в цепи якоря).
По мере разгона
электродвигателя растет ЭДС вращения
![]() и напряжение
и напряжение
![]() на зажимах якоря. При определенной
скорости 1
в момент
времени
на зажимах якоря. При определенной
скорости 1
в момент
времени
![]() напряжение
достигает напряжения
напряжение
достигает напряжения
![]() срабатывания контактора КМ1,
и он закорачивает первую ступень R1
пускового реостата. Аналогично происходит
закорачивание второй и третьей ступеней
реостата при скоростях, 2,
3,
после чего электродвигатель продолжает
работать на естественной характеристике.
срабатывания контактора КМ1,
и он закорачивает первую ступень R1
пускового реостата. Аналогично происходит
закорачивание второй и третьей ступеней
реостата при скоростях, 2,
3,
после чего электродвигатель продолжает
работать на естественной характеристике.
Управление в функции скорости используется также при торможении электроприводов, что поясняется на примере схемы, приведенной на рис. 1.14 (узлы пуска электродвигателя на схеме не показаны).
При нажатии стоповой кнопки SB2 отключается контактор КМ0, и через его размыкающий блок-контакт КМ0:2 к зажимам якоря электродвигателя подключается катушка реле торможения KV. Реле срабатывает и замыкает цепь питания катушки контактора торможения КМ1, который, подключая к якорю тормозной резистор R, переводит двигатель в режим динамического торможения.
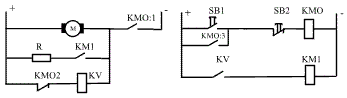
Рис. 1.14. Динамическое торможение электродвигателя
Постоянного тока в функции скорости
При снижении скорости, а следовательно и напряжения на якоре до величины напряжения отпускания реле KV оно отключает контактор КМ1, и двигатель переходит в режим замедления на выбеге.
Достоинство схем пуска и торможения электродвигателей по принципу скорости - их простота и дешевизна.
Недостатки:
зависимость времени запуска и бросков тока при выведении ступеней реостата от нагрузки на валу электродвигателя и напряжения питающей сети.
необходимость индивидуальной настройки контакторов.
1.10. Узлы пуска и торможения электродвигателей, работающие по принципу тока
Принцип поясняется упрощенной схемой пуска электродвигателя постоянного тока с последовательным возбуждением (рис. 1.15).
После замыкания контакта КМ0:1 линейного контактора напряжение питания подается на блокировочное реле KV и на электродвигатель через пусковой реостат R и обмотку токового реле КА.
Под действием
броска пускового тока до величины
![]() реле КА
срабатывает и размыкает цепь катушки
контактора КМ1.
Затем замыкается контакт реле KV,
подготавливая к включению контактор
КМ1.
реле КА
срабатывает и размыкает цепь катушки
контактора КМ1.
Затем замыкается контакт реле KV,
подготавливая к включению контактор
КМ1.

Рис. 1.15. Реостатный пуск электродвигателя
Постоянного тока в функции тока
По мере разгона электродвигателя растет ЭДС вращения Ея, а потребляемый им ток I снижается, и при достижении тока отпускания реле КА последнее замыкает свой контакт, подавая питание на катушку контактора КМ1. Контактор силовым контактом КМ1:1 закорачивает пусковой резистор R, а через блок-контакт КМ1:2 становится на самопитание. Поэтому повторное срабатывание реле КА от броска пускового тока в момент времени не приводит к отключению контактора КМ1, и электродвигатель продолжает разгон на естественной характеристике до установившейся скорости У.
На рис. 1.16 приведена схема пуска синхронного электродвигателя с подачей напряжения в цепь ротора в функции тока.
Схема работает следующим образом. При нажатии пусковой кнопки SB2 поступает напряжение на катушку контактора КМ0, который, срабатывая, силовыми контактами КМ0:1…КМ0:3 подключает к сети статор электродвигателя, а блок контактом КМ0:4 шунтирует пусковую кнопку. От броска пускового тока срабатывает токовое реле КА, которое замыкающим контактом КА:1 подает напряжение на обмотку блокировочного реле KV, а размыкающим контактом КА:2 разрывает цепь катушки контактора КМ1. Реле KV замыкает контакты KV:2, KV:1, подготавливает к включению контактор КМ1 и обеспечивает сохранение цепи питания собственной катушки при размыкании контакта КА:1 токового реле (становится на самоблокировку).

Рис. 1.16. Пуск синхронного электродвигателя