

6.2. Примеры простейших следящих электроприводов
6.2.1. Следящий электропривод с непрерывным управлением Вариант такого электропривода приведен на рис. 6.1.
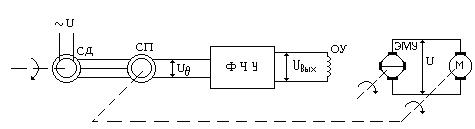
Рис. 6.1. Следящий электропривод с непрерывным управлением
Для измерения угла рассогласования вх вых используются сельсин-датчик (СД) и сельсин-приемник (СП), включенные по трансформаторной схеме. Ротор СД соединен с задающим валом, а ротор СП – с выходным валом электродвигателя М.
При согласованном положении роторов (вх вых) выходное напряжение U, снимаемое с однофазной обмотки СП, равно нулю. Равны нулю напряжение Uвых на управляющей обмотке ОУ электромашинного усилителя и напряжение U питания электродвигателя.
При повороте задающего вала на выходе СП появляется напряжение U Umsin, фаза которого зависит от знака угла рассогласования . На выходе фазочувствительного усилителя (ФЧУ) появляется напряжение Uвых соответствующей полярности. Появляется напряжение U на электродвигателе М, и он поворачивает выходной вал и вместе с ним ротор СП до согласованного положения роторов. Таким образом, выходной силовой вал повторяет перемещение задающего вала.
6.2.2. Релейный следящий электропривод
Упрощенная схема электропривода приведена на рис. 6.2.
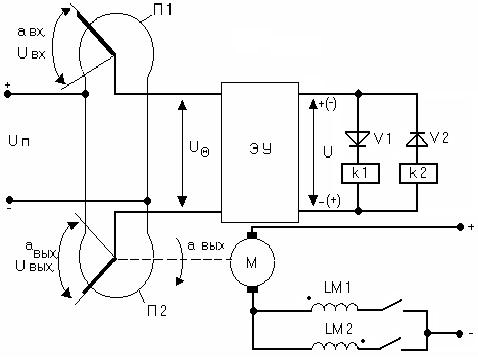
Рис. 6.2. Релейный следящий электропривод
Узел измерения угла рассогласования вх вых выполнен на потенциометрах П1 и П2. При одинаковых положениях движков потенциометров (вх вых) напряжения Uвх и Uвых одинаковы, а напряжение UUвх Uвых на входе электронного усилителя (ЭУ) равно нулю.
При повороте движка задающего потенциометра П1 на входе ЭУ появляется напряжение U, пропорциональное углу рассогласования вх вых, полярность которого зависит от знака угла рассогласования.
Появляется напряжение соответствующей полярности Uвых на выходе ЭУ, срабатывает одно из электромагнитных реле К1 или К2 и подает напряжение на электродвигатель М постоянного тока с двумя последовательными обмотками возбуждения. Двигатель поворачивает выходной вал и движок потенциометра П2 обратной связи до согласованного положения движков П1 и П2.
6.2.3. Импульсный следящий электропривод
Один из возможных вариантов электропривода приведен на рис. 6.3.
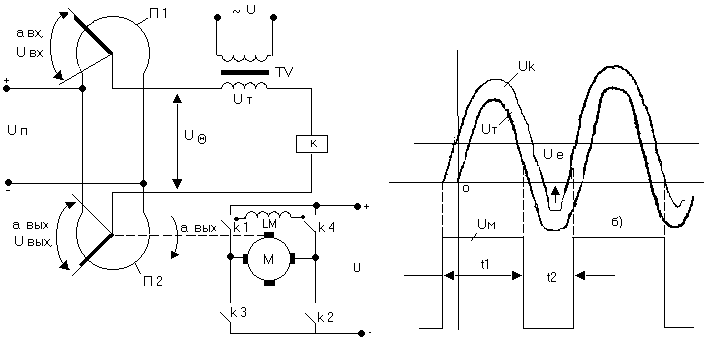
Рис. 6.3. импульсный следящий электропривод:
а - принципиальная электрическая схема;
б - графики напряжений UТ на вторичной обмотке
Трансформатора tv и Uк на обмотке электромагнитного поляризованного реле к;
в – график напряжения Uм на электродвигателе М
При согласованном положении движков задающего потенциометра П1 и потенциометра обратной связи П2 напряжение U . Под действием напряжения UТ вторичной обмотки трансформатора TV поляризованное реле К попеременно замыкает контакты К1, К2 и К3, К4, подавая на электродвигатель М напряжение одной и другой полярности. При этом продолжительности импульсов t1 и t2 одинаковы и двигатель неподвижен.
При появлении угла рассогласования вх вых и напряжения U соответствующей полярности реле переключается под действием суммарного напряжения U Uт + U. Продолжительность импульсов одной полярности увеличивается, другой уменьшается, и двигатель поворачивает выходной вал до устранения угла рассогласования .
В современных импульсных следящих электроприводах вместо поляризованного реле применяются полупроводниковые широтно-импульсные модуляторы (ШИМ) напряжения питания электродвигателя на транзисторах или тиристорах.