

9. Применение средств микропроцессорной техники в системах управления электроприводов
9.1. Общие сведения. Задачи микропроцессорного управления электроприводами
Большинство функций управления электроприводами традиционно реализуется на аппаратном уровне с использованием релейно-контактных и бесконтактных элементов автоматики.
Развитие микропроцессорной техники (МПТ) создает реальную возможность перехода от аппаратной к программной реализации функций контроля и управления.
Преимущества такого подхода:
1) гибкость, универсальность. Одно и тоже устройство можно использовать для решения различных задач; достаточно только сменить программу;
2) значительно меньше время и затраты на разработку и освоение изделия;
3) более простое и дешевое схемное решение, т.к. один микропроцессор (МП) или микроконтроллер (МК) обычно заменяет от 75 до 200 интегральных микросхем малой и средней степени интеграции;
4) более высокая надёжность из-за существенных сокращений количества элементов и связей между ними, более простое обслуживание.
По прогнозам специалистов по указанным причинам в ближайшие годы до 60…70% МП и МК будут использоваться для замены традиционных технических решений на основе жесткой логики микропроцессорными средствами.
При этом реализуются два основных направления:
Применение микропроцессорных систем замкнутого управления электроприводами с цифровым формированием алгоритмов управления, обеспечивающих повышение качества процессов (точности, быстродействия …), реализацию наиболее совершенных оптимальных и адоптивных систем управления.
Применение программируемых логических контроллеров, (ПЛК) позволяющих:
- опрашивать состояние дискретных (двухпозиционных) датчиков;
- выполнять логическую обработку поступающей информации и формировать управляющие сигналы на включение исполнительных элементов;
- диагностировать состояние управляемого объекта и самого управляющего устройства с выдачей информации в удобной для восприятия форме;
- обеспечивать возможность наладочного режима. И в том и в другом случае МП должен работать в темпе реального управляемого технологического процесса. В системах микропроцессорного управления применяют широкий спектр МП и МК от четырёх - до 32-х разрядных.
В сложных и быстродействующих электроприводах перспективно применение многопроцессорных систем, которые позволяют:
- распределять функции между несколькими микропроцессорами (например, организация ввода-вывода, выполнение арифметической и логической обработки поступающей информации, обслуживание подсистемы диагностики);
- использовать модульную структуру управляющего устройства с возможностью наращивания для выполнения новых функций;
- упростить программное обеспечение;
- распараллелить процессы обработки информации для повышения быстродействия;
- повысить надежность работы за счет резервирования;
- создавать многоуровневые (иерархические) системы управления комплексами взаимодействующих машин и установок.
9.2. Применение программных логических контроллеров (плк) в системах управления электроприводов
ПЛК применяют для замены релейно-контактных и бесконтактных схем управления, реализующих логические функции. Настройка ПЛК на выполнения различных функций осуществляется программно.
В минимальный комплект ПЛК входят: логический процессор, память программ, оперативное запоминающее устройство (ОЗУ) данных, устройство связи с объектом (УСО), пульт настройки и ввода программ (рис. 9.1).
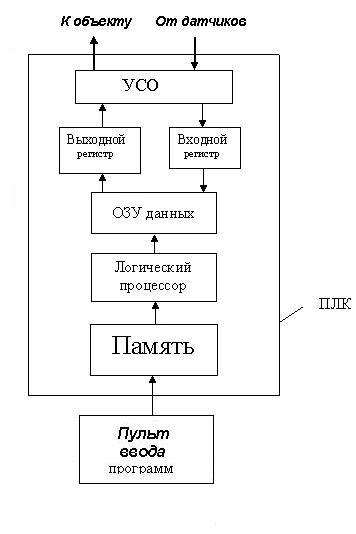
Рис. 9.1. Функциональная схема ПЛК
В памяти программ хранится описание алгоритма управления в виде последовательности структурных формул. Сигналы от датчиков, характеризующих состояние УО, поступают через УСО во входной регистр, а управляющее слово в виде комбинации нулей и единиц через выходной регистр и УСО воздействуют на исполнительные органы объекта.
ПЛК работает в циклическом режиме. В соответствии с программой процессор последовательно опрашивает входы датчиков (содержание входного регистра), производит логическое сравнивание состояний входов и выходов, по результатам которого включает соответствующие исполнительные элементы. Устройства, работающие по такому принципу, называют конечными автоматами.
ПЛК обычно используются без постоянного присутствия обслуживающего персонала. Поэтому пульт ввода программ выполняется автономным и подключается только на время этой операции.
Задание программы работы ПЛК осуществляется одним из трех способов:
- по принципиальной электрической схеме;
- по структурным формулам;
с использованием специальных языков символического кодирования.
При программировании по первому способу на пульте ввода используются клавиши с обозначениями элементов релейной схемы (замыкающие и размыкающие контакты, обмотки реле и др.)
При программировании по второму методу с клавиатуры набираются структурные формулы, описывающие работу логической схемы.
Для программирования современных ПЛК часто используются ЭВМ с записью программ на специальных языках, с последующей трансляцией в двоичные коды.
ПЛК делятся на 3 основных класса:
1-й класс – для управления несложными объектами по фиксированной программе. Они имеют небольшое число (10...96) входов и выходов, малую емкость памяти с однократно записанной программой;
2-й класс – для управления достаточно сложными, локально работающими объектами. Они имеют до нескольких сотен входов и выходов, память достаточной емкости, возможность ввода программ с автономного пульта. Системные программные средства при этом, как правило, отсутствуют;
3-й класс – для управления ответственными сложными объектами. Такие ПЛК сопрягаются с ЭВМ более высокого уровня, имеют развитый язык программирования (задания алгоритмов управления), собственные периферийные устройства (видеотерминалы, устройства печати и др.). Помимо управления объектом они могут передавать соответствующим образом обработанную информацию на ЭВМ верхнего уровня.