

Систем управления:
а) – разомкнутая система; б) – замкнутая релейная;
в) – замкнутая аналоговая
В противном случае применяют замкнутые СУЭП, релейные или аналоговые, причем первые из них обычно проще и дешевле аналоговых.
На рис. 10.2 приняты следующие обозначения:
АУУ – автоматическое управляющее устройство;
УО ‑ управляемый объект;
Д ‑ датчик управляемой величины;
g, f, u – задающее, возмущающее и управляющее воздействия;
y ‑ управляемая величина.
Кроме простейших случаев, в автоматизированных электроприводах требуется регулирование не одной, а нескольких величин, например, угловой скорости и тока. В этих случаях применяют многоконтурные (в частности двухконтурные) СУЭП с общим регулятором P, или с раздельными регуляторами каждой переменной, с параллельным или с подчиненным управлением.
Структуры многоконтурных СУЭП показаны на рисунке 10.3.
На рис. 10.3, а показана структура СУЭП с двумя управляемыми величинами у1 и у2, которыми могут быть, например, ток и угловая скорость двигателя. Сигналы обратной связи от соответствующих датчиков Д1 и Д2 поступают на общий суммирующий регулятор Р. Примеры таких СУЭП рассматривались в теме 3. Их недостаток – сложность настройки на качественное протекание переходных процессов.
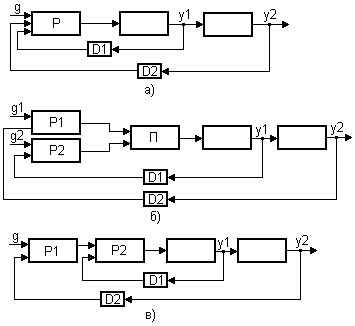
Рис. 10.3. Многоконтурные СУЭП:
а) – с общим суммирующим регулятором; б) ‑ с раздельными
Регуляторами и параллельным управлением; в) ‑ с раздельными регуляторами и подчиненным управлением
На рисунке 10.3 б показан вариант СУЭП с раздельными регуляторами Р1, Р2 двух управляемых переменных у1, у2 с параллельным управлением.
С помощью переключателя П в каждый момент времени управляющее воздействие формируется одним из регуляторов (Р1 или Р2) с наибольшим отклонением управляемой величины от заданного значения.
В современных регулируемых электроприводах наибольшее применение получили системы подчиненного управления (рис. 10.3 в), которые подробно рассматривались в теме 4.
В сложных системах с несколькими взаимосвязанными электроприводами находят применение иерархические структуры управления (рис. 10.4).
При подчиненном управлении (рис. 10.3 в) регулятор внешнего контура Р2 вырабатывает задающее воздействие g1 для регулятора Р1 внутреннего контура. Поэтому все контуры постоянно взаимодействуют друг с другом.
При рациональном разделении УО на блоки каждый контур, наряду с управлением соответствующей переменной, выполняет функцию нейтрализации большой постоянной времени данного контура.
Принцип подчиненного управления нашел широкое применение в аналоговых СУЭП с реализацией регуляторов из унифицированных модулей на базе операционных усилителей. Его достоинство – простота и удобство настройки СУЭП на оптимальное протекание переходных процессов.
Обобщением данного принципа является иерархическая (многоуровневая) структура управления, показанная на рисунке 10. 4.
На нижнем первом уровне располагаются локальные системы управления отдельных электроприводов с регуляторами угловой скорости и тока.
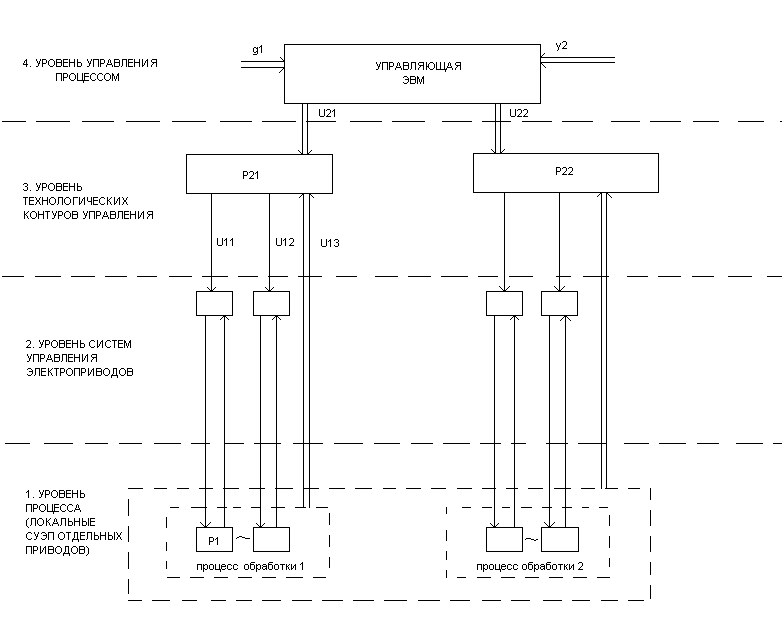
Рис. 10.4. Иерархическая структура управления
Задающие воздействия для них поступают от вышестоящего уровня 2 регулирования систем управления электроприводов (например, системы позиционирования, синхронного вращения, натяжение полосы и т. п.).
Третий уровень технологических контуров управления служит для управления процессами обработки с учетом взаимосвязей между отдельными приводами. Для реализации управления на этом уровне используется информация о текущих значениях переменных, характеризующих состояние технологического процесса (например, положение, толщина и натяжение полосы и т. д.). Задающие воздействия для уровня 3 вводятся оператором или поступают от управляющей ЭВМ верхнего 4-го уровня. Устройства этого уровня управляют ходом технологического процесса в соответствии с технико-экономическими критериями оптимизации. Для этого по цепи обратной связи поступает информация о текущих значениях параметров, характеризующих состояние технологической установки.
Преимущество иерархической структуры по сравнению с непосредственным управлением от ЭВМ всеми локальными электроприводами – возможность разработки, изготовления и наладки отдельных процессов обработки и приводов независимо от всей системы. Кроме того, повышается живучесть системы, при неисправностях возможен временный переход отдельными агрегатами на ручное управление.
При реализации этапа 2 возможна многократная оценка и сравнение выбранных вариантов. В первую очередь оцениваются:
- технические, технологические и экономические характеристики вариантов;
- характеристики, определяющие влияние системы на окружающую среду;
- степень соответствия системы конструктивным и эстетическим требованиям.
При оценке технологических параметров учитывают:
- долю стандартных узлов в общем числе изделий;
- долю ручных операций;
- соответствие требованиям стандартов, предписаний, инструкций;
Сравнение вариантов
носит многокритериальный характер. Для
количественной оценки степени соответствия
решения предъявленным требованиям
вводят ряд численных показателей
![]() (i=1,…,
n).
(i=1,…,
n).
Значения отдельного показателя Qi определяется на основе шкалы оценок, например:
 =5 – требования
выполнены очень хорошо;
=5 – требования
выполнены очень хорошо;
=4 ‑ требования выполнены хорошо;
=3 ‑ требования выполнены удовлетворительно;
=2 ‑ требования выполнены недостаточно;
=1 ‑ требования выполнены неудовлетворительно.
Так как отдельные
показатели не равноценны с точки зрения
их значимости, вводятся весовые
коэффициенты
![]() ,
например, следующим образом:
,
например, следующим образом:
 =5 – i-я
характеристика системы очень важна для
цели разработки;
=5 – i-я
характеристика системы очень важна для
цели разработки;
=4 ‑
=3 ‑
=2 ‑
=1 – i-я характеристика несущественна для цели разработки.
Выбор наилучшего решения производится по максимуму интегрального показателя
![]() .
.
Этапы 3 и 4. Расчет и выбор оптимальных параметров контуров регулирования тока и угловой скорости применительно к различным вариантам вентильных электроприводов был рассмотрен в теме 4. Поэтому в данной теме остановимся только на двух вопросах:
1) оценка и сравнение отобранных вариантов;
2) обеспечение помехозащищенности СУЭП.
Надежность, помехозащищенность и безопасность работы в конечном счете определяют эксплуатационные качества системы электропривода.
Проблема помехозащищенности возникает в связи с тем, что маломощные управляющие устройства СУЭП работают в непосредственной близости с силовыми электрическими элементами (контакторы, электромагниты, двигатели, преобразователи и т. д.)
Это может приводить к появлению опасных возмущающих воздействий, которые могут нарушать нормальную работу или даже выводить из строя маломощные полупроводниковые элементы.
Различают:
Собственные возмущения на цепи управления за счет:
- изменение уровня сигналов в соседних проводах;
- динамических коротких замыканий цепей при переключении логических элементов;
- наведенных напряжений частотой 50 Гц от цепи питания;
- перенапряжений при отключении электромагнитных устройств;
- искажения сигналов из-за явления отражения в линиях передачи, из-за дребезга контактов реле и выключателей.
Внешние возмущения:
- электрические и магнитные внешние поля;
- помехи, действующие на входные цепи, в частности, импульсы напряжения соседних силовых и управляющих цепей;
- помехи по питанию, вызванные переключениями в силовых цепях, грозовыми разрядами, работой силовых вентильных преобразователей и т. д.
Возмущения могут возникать за счет гальванических связей (например, при использовании общих проводников), а также индуктивных и емкостных связей между гальванически не связанными цепями.
Требования помехозащищенности должны учитываться при проектировании и изготовлении системы.
Рекомендуемые мероприятия по защите от помех:
В устройствах обработки сигналов:
- экранировать электронные устройства (размещать в металлических корпусах);
- использовать элементы с возможно большим отношением полезный сигнал – шум;
- отдавать предпочтение синхронизированному по тактам режиму работы по сравнению с асинхронным;
- применять экранированные провода или витые пары;
- разделять конструктивно устройства обработки данных, электромеханические элементы и силовое электронное оборудование.
В линиях передачи сигналов:
- применять согласованные линии с определенным волновым сопротивлением;
- разносить их в пространстве;
- не использовать для передачи нескольких сигналов один общий провод;
- при необходимости для каждого сигнала применять отдельную экранированную витую пару;
- повышать уровень сигнала в линиях связи;
- применять емкостные фильтры;
- использовать свето-волоконную оптику.
В системе питания:
- разделять в пространстве сигнальные провода и провода питания;
- использовать раздельные блоки питания для аналоговых и дискретных устройств;
- применять экраны между обмотками питающих трансформаторов;
- применять максимально короткие низкоомные провода;
- устанавливать параметрические конденсаторы ёмкостью 0.1 - 0.2 мкФ на выходных зажимах блоков питания;
- устанавливать сетевые фильтры (одно ‑ или многозвенные) в месте подвода питающей сети, как показано на рис. 10.5.
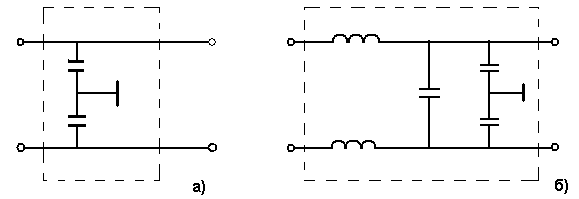
Рис. 10.5. Схемы фильтров: а) – однозвенный; б – двухзвенный
В электромагнитных аппаратах:
При отключении обмоток электромагнитных устройств могут возникать ЭДС самоиндукции, значительно превышающие рабочие напряжения. Для их ограничения применяют шунтирования обмоток электромагнитных аппаратов различными цепями (рис. 10.6).
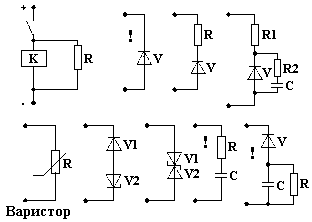
Рис. 10.6. Помехозащитные средства для электромагнитных