

С фазным ротором в функции времени
а – принципиальная электрическая схема;
б – графики механических характеристик;
в – зависимости скорости и тока от времени
Для отключения электродвигателя нажимается стоповая кнопка SB2, обесточивающая катушку контактора КМ0. Схема возвращается в исходное состояние.
На рис. 1.9 показан узел схемы управления электродвигателем постоянного тока с двумя ступенями пускового реостата.
При подаче напряжения на схему получают питание реле времени КТ1 и КТ2, которые разрывают цепи питания контакторных катушек КМ1, КМ2.
Нажатие на пусковую кнопку SB1 приводит к включению контактора КМ0 , который силовым контактом КМ0:1 подключает к сети якорную цепь электродвигателя с пусковыми резисторами R1, R2, и двигатель начинает разгоняться на реостатной характеристике 1.
Размыкающим
блок-контактом КМ0:3
контактор КМ0
разрывает цепь реле времени КТ.
С выдержкой времени 1
=t1
замыкается
контакт этого реле в цепи питания катушки
контактора КМ1,
который, срабатывая, контактом КМ1:1
выводит первую ступень R1
пускового резистора, и двигатель
переходит на реостатную характеристику
2. Одновременно размыкающим блок-контактом
КМ1:2
обесточивается реле времени КТ2
и оно с выдержкой времени
![]() замыкает цепь питания контакторной
катушки КМ2.
Контактор, срабатывая, выводит вторую
ступень R2
пускового резистора, и двигатель
продолжает разгон на естественной
характеристике 3.
замыкает цепь питания контакторной
катушки КМ2.
Контактор, срабатывая, выводит вторую
ступень R2
пускового резистора, и двигатель
продолжает разгон на естественной
характеристике 3.
На рисунках 1.8 и 1.9 помимо механических характеристик = (M) показаны графики изменения тока и скорости электродвигателей во времени, дополнительно иллюстрирующие работу рассмотренных узлов электрических схем.
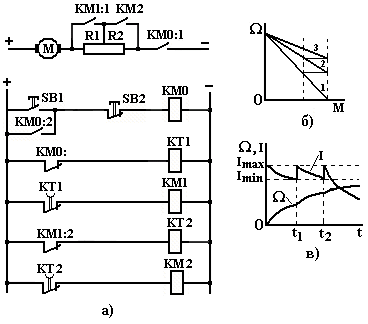
Рис. 1.9. Реостатный пуск электродвигателя постоянного тока
В функции времени: а – упрощенная схема управления;
б – графики механических характеристик;
в – зависимости скорости и тока от времени
На рисунке 1.10 приведен типовой узел схемы управления электродвигателем постоянного тока с независимым возбуждением при динамическом торможении. Здесь же показаны механические характеристики =(M), а также зависимости тормозного тока и скорости от времени при торможении.
В исходном состоянии двигатель работает с установившейся скоростью (точка А на механической характеристике). Через замыкающий блок-контакт контактора КM0 включено реле времени КТ, контакт этого реле в цепи контакторной катушки КM1 замкнут, но цепь разомкнута блок-контактом КМ0:4 контактора КМ0.
Для остановки электродвигателя с динамическим торможением нажимается стоповая кнопка SB2, отключающая контактор КM0, который силовым контактом КM0:1 отключает якорную цепь электродвигателя от сети, блок-контактом КM0:4 подает питание на катушку контактора КМ1 динамического торможения, а блок-контактом КM0:3 отключает реле времени КТ, начинающего отсчет выдержки времени торможения. Контактор КМ1 подключает тормозной резистор R к зажимам якоря электродвигателя, переводя его на характеристику 2 динамического торможения (точка В). По истечении выдержки времени размыкается контакт КТ, отключается контактор КМ1, прекращая тормозной режим.
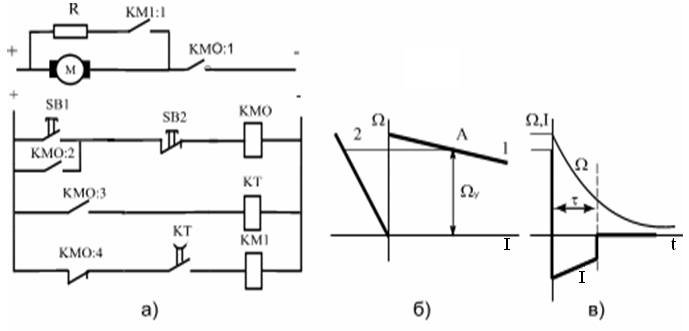
Рис. 1.10. Управление электродвигателем постоянного тока