

15.2 Сети одномерных конечных элементов
На рис. 3 приведены примеры из различных предметных областей с одинаковой топологией с точки зрения теории графов, имеющие одинаковый принцип построения математической модели на основе МКЭ.
На
рис. 3, а
показана
электрическая схема из семи резисторов.
Источники питания на схеме не показаны,
но их влияние характеризуется токами
![]()
Если
резистор
![]() рассмотреть
изолированно от системы, то с помощью
закона Ома можно записать соотношение
между исходящими токами
рассмотреть
изолированно от системы, то с помощью
закона Ома можно записать соотношение
между исходящими токами
![]() и напряжениями
и напряжениями
![]() на
его концах:
на
его концах:
![]() (11)
(11)
или в матричной форме
![]() (12)
(12)
![]() (12
а)
(12
а)
Узлы
сети и ее элементы можно нумеровать
произвольно, однако при выделении
каждого элемента условимся под индексом
i
всегда
понимать меньший номер. Нетрудно видеть,
что
![]() поэтому силу тока в узле i
можно
определять по формуле
поэтому силу тока в узле i
можно
определять по формуле
![]() (13)
(13)
а
если рассматривается узел
![]() ,
то правую часть формулы (13) следует
умножить на -1.
,
то правую часть формулы (13) следует
умножить на -1.
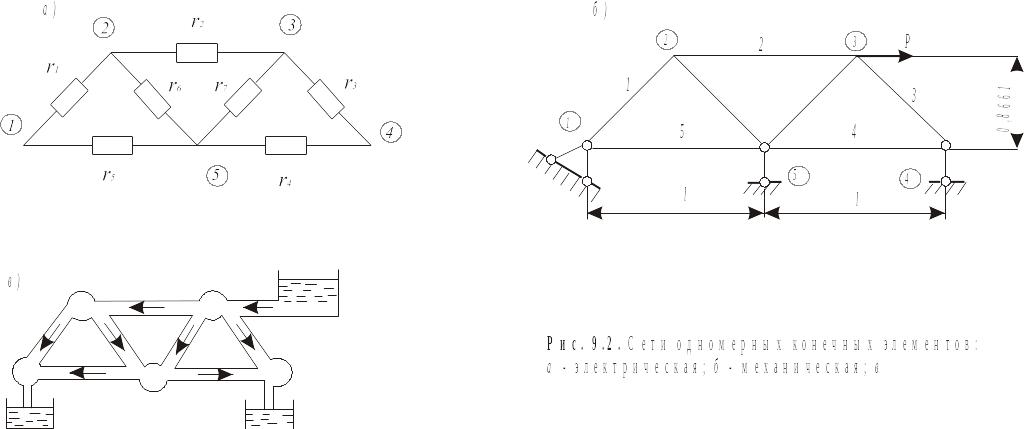
а) электрическая; б) механическая; в) гидравлическая
Рис. 3 Сети одномерных конечных элементов:
При составлении ансамбля конечных элементов запишем уравнения «равновесия» (закон Кирхгофа) поочередно для каждого узла. Для формализации процедуры будем рассматривать все элементы сети независимо от того, примыкают они к данному узлу или нет. Если элемент примыкает к рассматриваемому узлу своим началом, будем принимать равенство (13) со своим знаком, т. е. умножать его на 1. Если это окажется конец элемента, то будем вводить множитель – 1. Если элемент не примыкает к узлу, то принимать множитель 0. С целью сокращения записей условимся матрицу жесткости обозначать буквой К, снабженной индексом, указывающим номер элемента. Для первого узла (рис. 3, а) будем иметь:
для второго узла
Поступая аналогично с остальными узлами, можем записать математическую модель электрической системы:
 (14)
(14)
При рассмотрении элементов анализа сетей было дано определение и указан прием построения матрицы инциденций ориентированного графа. Здесь мы получили такую матрицу, занумерованные узлы и элементы сети.
Перейдем к рассмотрению механической системы (рис. 3, 6) в виде фермы, загруженной силой Р. Предварительно отметим существенное отличие этой системы от ранее рассмотренной. В электрической системе сила тока есть скалярная величина, поэтому не имеет значения пространственное расположение резисторов, важен лишь факт их примыкания к данному узлу. Для фермы все иначе: здесь имеет значение не только топология, но и геометрия фермы, а также ориентация внешних сил и реакций связей. Для плоской фермы с шарнирными узлами каждый узел имеет две степени свободы, что определяет 10 степеней свободы для всей совокупности узлов. Однако внешние связи исключают две степени свободы в первом узле и по одной (в вертикальном направлении) – в 4 и 5 узлах. Для учета этого обстоятельства необходимо вычеркнуть соответствующие строки матрицы S, характеризующей степени свободы системы (две строки для первого узла и вторые строки – для 4 и 5 узлов):
 (15)
(15)
При рассмотрении конечного элемента для электрической системы основным параметром, определяющим связь между фазовыми переменными I и U, было электрическое сопротивление резистора r, а сама связь устанавливалась законом Ома.
В
случае фермы фазовыми переменными будут
усилия в стержнях N
и удлинения стержней![]() ,
параметром – погонная жесткость
,
параметром – погонная жесткость![]() ,
а связь
переменных состояния определится
законом Гука
,
а связь
переменных состояния определится
законом Гука
![]()