

15.3 Виды конечных элементов
Выше
были рассмотрены системы, включающие
одномерные симплекс-элементы, при этом
функции формы элемента (4) оставались
одинаковыми для задач из разных предметных
областей. Физическая сущность задачи
отображается матрицей жесткости. В
электрических системах эта матрица
зависит от сопротивлении R,
емкостей С,
индуктивностей L
элементов,
составляющих систему. В системах,
характеризующих работу строительных
конструкций, матрица жесткости
непосредственно связана с погонными
жесткостями
для растянутых (сжатых) элементов,
![]() – для изгибаемых элементов и т.д. Для
нелинейных систем, например, для схемы
«в» (рис. 2), где связь между напором V
и расходом
J
имеет вид
– для изгибаемых элементов и т.д. Для
нелинейных систем, например, для схемы
«в» (рис. 2), где связь между напором V
и расходом
J
имеет вид
![]() ,
матрица
жесткости будет представлять уже не
массивы констант, а некоторые функции
от напора жидкости.
,
матрица
жесткости будет представлять уже не
массивы констант, а некоторые функции
от напора жидкости.
В случае функции двух переменных х, у используют плоские конечные элементы в виде многоугольников, обычно треугольника и прямоугольника.
Рассмотрим двумерный симплекс-элемент, представляющий собой плоский треугольник (рис. 4).
Интерполяционный полином, аппроксимирующий непрерывную функцию v(x, у) внутри симплекс-элемента, имеет вид
![]() (16)
(16)
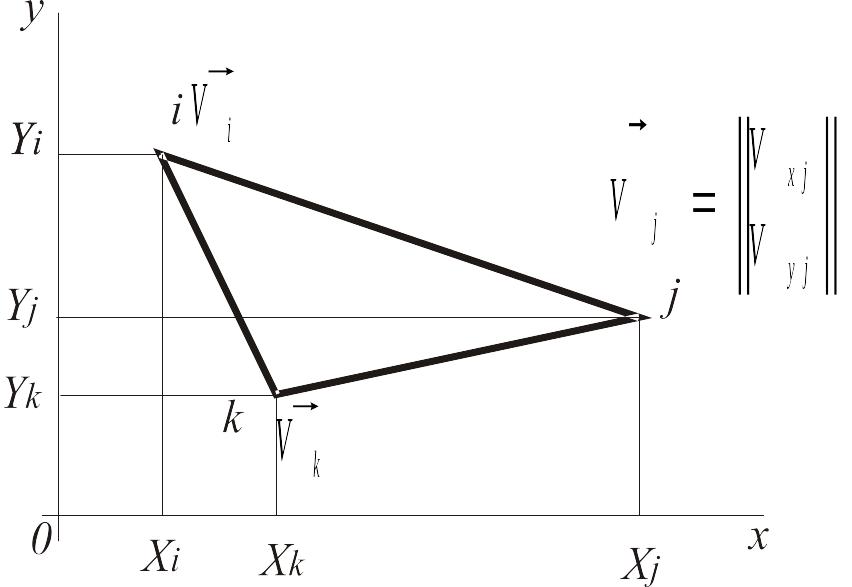
Рис. 4. Двумерный симплекс-элемент
Для придания этому выражению вида, удобного для применения в методе конечных элементов, будем поступать так же, как это делали на втором этапе п.п. 15.1 [см. формулы (1)...(6)]. Граничные условия будут иметь вид:
при
![]() функция v(x,
у) примет
значение
функция v(x,
у) примет
значение![]() ;
;
при
![]() функция
v(x,
у) примет
значение
функция
v(x,
у) примет
значение![]() .
.
Используя
формулу (16), получим систему трех уравнений
для определения коэффициентов
![]() Подставляя эти коэффициенты в полином
(16) и проделав необходимые преобразования,
аналогичные рассмотренным в п. 15.1,
запишем аналогичную (5) формулу
Подставляя эти коэффициенты в полином
(16) и проделав необходимые преобразования,
аналогичные рассмотренным в п. 15.1,
запишем аналогичную (5) формулу
![]() (17)
(17)
где функции формы элемента имеют вид:
 (18)
(18)
Здесь ∆ – площадь треугольника конечного элемента;
![]() – коэффициенты,
определяемые путем круговой перестановки
индексов выражений:
– коэффициенты,
определяемые путем круговой перестановки
индексов выражений:
![]() . (19)
. (19)
Формулы
(16)...(19) будут одинаковыми для всех задач,
где используют треугольные симплекс-элементы.
Матрицы жесткостей будут зависеть от
физической сущности задачи. Рассмотрим
это на примере плоской задачи теории
упругости. Заметим, что в этом случае
каждый узел имеет две степени свободы,
поэтому вектор
имеет
две компоненты vx
и
![]() каждую
из которых определяют по формуле (17).
каждую
из которых определяют по формуле (17).
Деформации внутри конечного элемента можно выразить через перемещения с помощью зависимостей Коши:
![]()
Выполняя дифференцирование равенства (17) с учетом обозначений (18), запишем зависимости Коши в матричной форме:
 (20)
(20)
или
![]() . (20
а)
. (20
а)
Для перехода от деформаций тела к напряжениям используем закон Гука при плоском напряженном состоянии:
 (21)
(21)
или
![]() . (21
а)
. (21
а)
Матрицы
D
и В
содержат всю информацию о конечном
элементе: матрица D
определяет его упругие характеристики
а матрица В
– геометрические. Остается определить
еще одну матрицу (матрицу жесткости К),
которая связывает усилия, действующие
в узлах конечного элемента, с перемещениями
этих узлов. Для записи этой матрицы
воспользуемся принципом возможных
перемещений, согласно которому при
равновесии тела работа внешних сил Р
на возможных
перемещениях узлов
![]() т.
е.
т.
е.
![]() равна
по величине работе внутренних сил на
тех же перемещениях:
равна
по величине работе внутренних сил на
тех же перемещениях:
![]() ,
где
,
где
![]() –
деформация, отвечающая возможным
перемещениям;
–
деформация, отвечающая возможным
перемещениям;
![]() – объем конечного элемента. В результате
преобразований получим искомую связь
между усилиями в узлах конечного элемента
и перемещениями этих узлов:
– объем конечного элемента. В результате
преобразований получим искомую связь
между усилиями в узлах конечного элемента
и перемещениями этих узлов:
![]() , (22)
, (22)
где матрица жесткости К будет равна
![]() (23)
(23)
Матрица жесткости (23) конечного элемента не зависит от действующих на элемент нагрузок и поэтому остается неизменной для всех нагружений. Элементы этой матрицы представляют собой коэффициенты канонических уравнений метода перемещений для расчета одного конечного элемента.
Рассмотрим объединение конечных элементов в ансамбль на примере простейшей сети из трех конечных элементов (рис. 5).
Для
каждого конечного элемента мы можем
записать формулу (17), заменяя узлы
![]() конкретными номерами. Так, для первого
элемента
конкретными номерами. Так, для первого
элемента
![]() .
.
Поступая аналогично с остальными узлами, получим:
 (24)
(24)
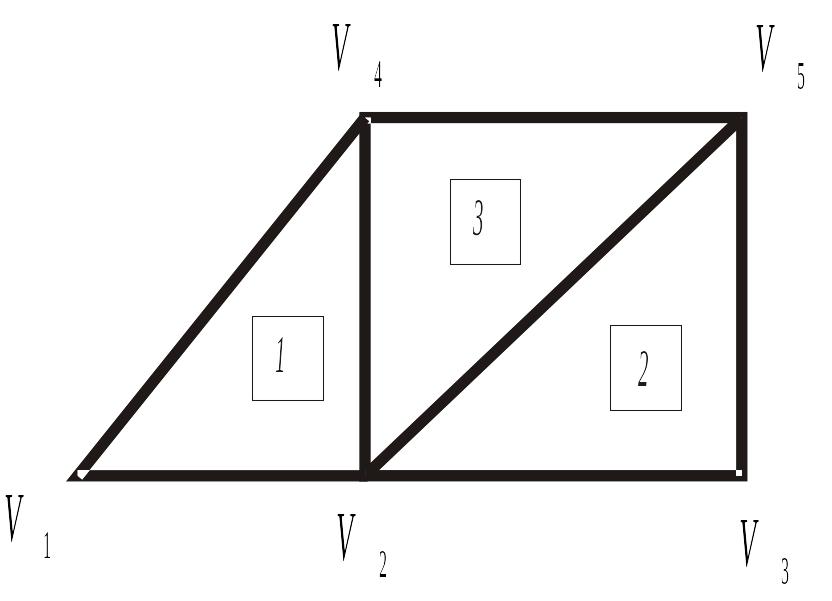
Рис.5. Ансамбль трех конечных элементов
Напомним, что узловые значения искомой функции
![]()
пока еще не известны и подлежат определению. С этой целью нужно использовать какой-нибудь принцип, выражающий физическую сущность задачи. В задачах строительной механики таким принципом могут быть уравнения равновесия с учетом совместности перемещений. Когда мы все это проделаем, задача будет решенной, поскольку формулы (20), (21), (24) с учетом обозначений (18), (19) позволяют определить в любой точке области нормальные и касательные напряжения, найти угловые и линейные деформации, вычислить перемещения данной точки в направлении осей х и у. Совокупность указанных формул, полностью определяющих поведение исследуемой системы, составляет ее математическую модель.
Перейдем к объединению конечных элементов в ансамбль.
Пусть в узлах системы конечных элементов действуют внешние силы, определяемые вектором
![]() (25)
(25)
К
каждому i-му
узлу сети примыкает в общем случае
![]() конечных элементов, каждый из которых
вносит свой вклад в матрицу жесткости.
Поэтому для каждого i-го
узла суммарная матрица жесткости будет
представлять собой сумму элементов
матриц жесткости всех примыкающих к
узлу элементов, т.е.
конечных элементов, каждый из которых
вносит свой вклад в матрицу жесткости.
Поэтому для каждого i-го
узла суммарная матрица жесткости будет
представлять собой сумму элементов
матриц жесткости всех примыкающих к
узлу элементов, т.е.
![]() , (26)
, (26)
в
то время, как узловые перемещения для
всех этих элементов будут общими в силу
совместности перемещений всех элементов,
соединенных в i-м
узле. Поскольку узлы имеют две степени
свободы, вектор перемещения i-го
узла будет содержать две компоненты
перемещений
![]() точно
так же, как внешняя сила [см. формулу
(25)] имеет две компоненты Pxi,
Pyi.
Совокупность
перемещений всех m
неопорных
узлов сети конечных элементов определится
m-мерным
вектором перемещений:
точно
так же, как внешняя сила [см. формулу
(25)] имеет две компоненты Pxi,
Pyi.
Совокупность
перемещений всех m
неопорных
узлов сети конечных элементов определится
m-мерным
вектором перемещений:
![]() (27)
(27)
Общую матрицу жесткости для всей конструкции можно выразить в виде
![]() . (28)
. (28)
Окончательная зависимость между вектором сил (25) и вектором перемещений (27) будет иметь вид
. (29)
Таким образом, вектор узловых значений искомой функции будет равен
![]() . (30)
. (30)
Литература:
1. Ильина Н.В. Системный анализ и моделирование процессов в техносфере: Учеб. пособие / Н.В. Ильина, Д.Д. Лапшин, В.И. Федянин. – Ч. 1. Воронеж: ГОУВПО «Воронежский государственный технический университет, 2008. – 206 с.
Лекция 16. Аналитические модели сложных систем