

5.3. Формирование физического адреса в микропроцессоре Intel 8086
Адресное пространство микропроцессора i8086 составляет 1 Мбайт и обеспечивается 20-разрядной шиной адреса. Логически память разбивается на сегменты размером 64 Кбайт. Физический адрес (РА) памяти, поступающий на шину адреса микропроцессора, состоит из двух 16-битных частей - адреса сегмента (Seg) и исполнительного адреса (ЕА), суммируемых со смещением 4 бита. Сдвиг адреса сегмента на 4 бита влево эквивалентен его умножению на 16, т.е. физический адрес вычисляется как РА = 16 X Seg + ЕА. Адрес сегмента может храниться в одном из сегментных регистров: CS, DS, SS или ES.
|
|
|
Рис. 5.5 Формирование физического адреса
|
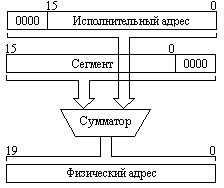
Исполнительный адрес, также называемый эффективным адресом, может быть константой, содержимым регистра, ячейки памяти или суммой нескольких величин (например, двух регистров и константы), но эта сумма является 16-разрядной, т.к. перенос игнорируется. Таким образом, физический адрес никогда не перейдет границу 64-килобайтного сегмента, на начало которого указывает текущий сегментный указатель.
5.4 Способы адресации микропроцессора
Регистровая адресация. Операнд (байт или слово) находится в регистре. Этот способ применим ко всем программно адресуемым регистрам микропроцессора.
Пример:
push es
mov dx,cx
xchg al,ah
Непосредственная адресация. Операнд (байт или слово) записывается непосредственно в коде команды.
Пример:
mov ax,2DF4h
mov dh,C2h
Прямая адресация к памяти. В команде указывается символическое обозначение ячейки памяти, над содержимым которой требуется выполнить операцию, либо ее адрес, заключенный в квадратные скобки.
Пример:
mov dl,_byte
mov word,cx
mov [00C1],bh
При использовании прямой адресации к памяти предварительно необходимо настроить какой-либо сегментный регистр на начало того участка памяти, в котором находится адресуемая ячейка.
Базовая и индексная адресация к памяти. В этом случае, относительный адрес ячейки памяти находится в регистре, обозначение которого заключается в квадратные скобки. При использовании регистра BX адресацию называют базовой, при использовании регистров SI или DI – индексной. При адресации через регистры BX, SI или DI в качестве сегментного регистра, по умолчанию, используется сегментный регистр DS. Однако, в случае необходимости можно заменить используемый по умолчанию сегментный регистр посредствам префикса замены регистра.
Пример:
mov dl,[bx]
mov es:[di],cx
mov [si],ax
Базовая и индексная адресации к памяти со смещением. Исполнительный адрес операнда определяется суммой содержимого базового или индексного регистра (BX, BP, SI, DI) и смещения, указанного в коде команды.
Пример:
mov dx,[di+12h]
mov [si+3FC0h],al
mov cx,mem[si]
mov 2[bp],dl
При этом возможно несколько вариантов записи:
Регистр вместе со смещением записывается в квадратных скобках;
Записывается мнемоническое обозначение некоторого массива элементов, после которого в квадратных скобках указывается базовый или индексный регистр;
Записывается числовое смещение, после которого в квадратных скобках базовый или индексный регистр;
При использовании регистра BP необходимо помнить, что в качестве сегментного регистра по умолчанию подразумевается регистр SS.
Базовая и индексная адресация к памяти со смещением использует не физический, а эффективный адрес ячейки памяти.
Для двухоперандных команд возможны 3 варианта размещения операндов:
источник и приемник в регистре;
источник в регистре, приемник в памяти;
источник в памяти, приемник в регистре.
Вариант, когда оба операнда в памяти запрещен!
Базово-индексная адресация к памяти. Исполнительный адрес операнда определяется суммой содержимого базового и индексного регистров. Для микропроцессора i8086 допускается использование следующих пар регистров:
[BX][SI]
[BX][DI]
[BP][SI]
[BP][DI]
Если в качестве базового регистра выступает BX, то в качестве сегментного регистра по умолчанию подразумевается регистр DS; при использовании в качестве базового регистра BP сегментным регистром по умолчанию считается SS. При необходимости можно явно указать требуемый сегментный регистр.
Пример:
mov cx,[bx][si]
mov [bp+di],ax
mov es:[bp+si],ah
Базово-индексная адресация к памяти со смещением. Относительный адрес операнда определяется суммой трех составляющих: содержимого базового и индексного регистров, а также дополнительного смещения. Допускается использование тех же регистровых пар, что и в базово-индексном методе адресации без смещения. Те же правила распространяются и на использование сегментных регистров.
Пример:
mov mem[bx][di],dx
mov 4[bp][si],ch
mov bx,[bx+di+0C21h]
Значительная часть рассмотренных выше способов адресации служит для обращения к ячейкам памяти. Однако, один и тот же результат можно получить, используя различные методы адресации. Например, все три приведенные ниже команды:
mov dl,mem+3
mov dl,mem[bx] ;в bx заранее занесено число 3
mov dl,[si][di] ;в bx заранее занесено число 3, а в si – смещение mem приведут к загрузке в регистр DL четвертого элемента массива mem (если выполнятся условия приведенные в комментариях). Но, стоит отметить, что различные методы адресации занимают различный объем памяти и выполняются за различное число тактов микропроцессора. Таким образом, тщательный подбор методов адресации, используемых в вашем коде, может в какой- то степени увеличить скорость выполнения программы или уменьшить объем необходимой памяти, а иногда и то и другое.
Система команд микропроцессора изучается в другой дисциплине и поэтому в данном учебном пособии не приводится.