

Нелинейные цепи
Элементы нелинейных цепей на постоянном токе, их характеристики и параметры
Во всех предыдущих разделах рассматривались режимы работы линейных электрических цепей, токи и напряжения которых были связаны линейными уравнениями. Цепи, содержащие хотя бы один нелинейный элемент, называются нелинейными цепями. Зависимость тока от напряжения у таких элементов в большей или меньшей степени отлична от линейной. Особо подчеркнем, что принцип наложения в таких цепях неприменим, в отличие от линейных цепей. Характеристики нелинейных элементов могут задаваться аналитическими функциями или с помощью таблиц. Все это усложняет расчет цепей и требует специальных методов расчета. Нелинейное сопротивление задается нелинейной вольт-амперной характеристикой, нелинейная катушка - вебер-амперной характеристикой, емкость – кулон-вольтной характеристикой. Все перечисленные зависимости весьма разнообразны, но их можно систематизировать по двум основным группам с симметричными и несимметричными характеристиками. Нелинейный элемент имеет симметричную характеристику, если она симметрична относительно начала координат, в противном случае характеристика несимметрична.
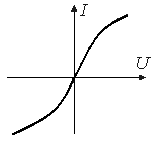
Рис.4.1.1. Характеристика лампы накаливания
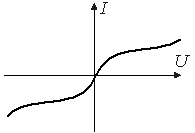
Рис.4.1.2. Характеристика бареттера
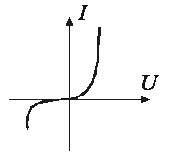
Рис.4.1.3. Характеристика диода (вентиля)
На рис.4.1.1 – 4.1.3 представлены нелинейные элементы с симметричными и несимметричными вольт-амперными характеристиками. Нелинейные элементы также подразделяются на управляемые и неуправляемые. Отличительной особенностью управляемых элементов является наличие семейства вольт-амперных характеристик: транзисторы, магнитный усилитель.
4.2. Статические и динамические характеристики нелинейных элементов
Режим работы нелинейного элемента во многом зависит от выбора рабочей точки на характеристике (рис 4.2.1).

Рис.4.2.1. Определение статического и динамического сопротивления
Статическое сопротивление определяется тангенсом угла наклона секущей, проведенной через начало координат и рабочую точку А, т.е.
Rст ~ tgα.
Если точка А перемещается по характеристике в некотором диапазоне, то вводится понятие динамического сопротивления, которое определяется тангенсом угла наклона касательной, проведенной через точку А, т.е.
Rд ~ tgβ .
Замена нелинейного элемента линейным и источником ЭДС – один из вариантов линеаризации цепи.

Рис.4.2.2. Определение по виду вольт- амперной характеристики
схемы замещения
На рис. 4.2.2 показана линеаризация нелинейного элемента в рабочей точке линейным элементом с сопротивлением Rд = mR∙tgα,
где mR – масштаб сопротивления, Е - источник ЭДС.
Тогда величина тока через нелинейный элемент определится как
![]() .
(4.2.1)
.
(4.2.1)
![]()
Рис.4.2.3. Исходный нелинейный элемент
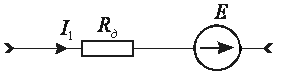
Рис.4.2.4. Эквивалентная схема замещения нелинейного элемента
На рис. 4.2.3 и 4.2.4 показаны соответственно исходный нелинейный элемент и схема замещения , полученная после линеаризации.
При вогнутом характере кривой (рис. 4.2.5) знак ЭДС в формуле (4.2.1) изменится на противоположный (4.2.2).
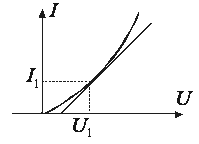
Рис.4.2.5. Определение по виду вольт- амперной характеристики
схемы замещения
![]() .
(4.2.2)
.
(4.2.2)