Теоретическая механика. Теория, задания и примеры решения задач (Б.Е.Ермаков)
.pdf240
Требуется определить момент M, если P = Q = 0,5 Н, а = 1 м.
Решение
Так как связи идеальные и удерживающие, то применяем принцип возможных перемещений
n
∑δAkА = 0.
k =1
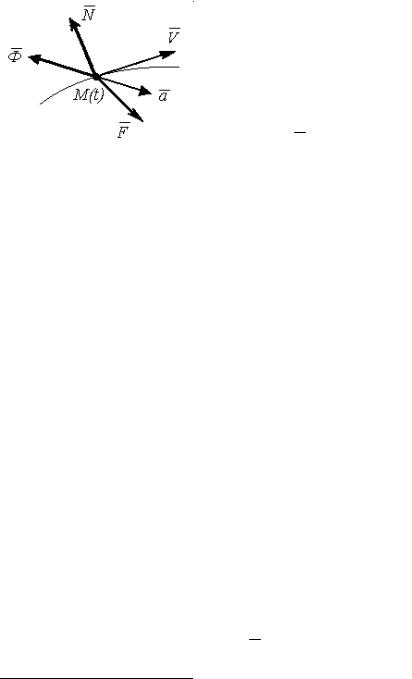
Сообщаем точкам системы возможные перемещения. Так как все связи стационарные (склерономные), то возможные перемещения δrk удовлетворяют тем же условиям, что и скорости Vk .
Звенья OA и O1D могут совершать вращательные движения, звенья ABD и BC – плоскопараллельное, а ползун C - поступательное.
Сообщим звену OA бесконечно малый поворот под углом δϕ,
тогда перемещение δrA будет перпендикулярно звену OA, пере-
мещение δrD - перпендикулярно O1D, перемещение δrC - параллельно направляющей плоскости ползуна.
Строим мгновенный центр поворотов звеньев ABD, BC. Запишем сумму работ момента M и сил P, Q на собственных
возможных перемещениях:
|
|
−Mδϕ −Pδr |
cos60D +Qδr cos30D = 0. |
(4) |
||||||||
|
|
|
|
|
|
B |
|
|
|
C |
|
|
Определим все возможные перемещения через δϕ. |
|
|||||||||||
δr |
A |
= aδϕ; |
δr |
A |
= δr |
cos60D; |
δr cos60D |
= δr |
cos30D. |
|||
|
|
|
|
|
|
B |
|
C |
B |
|
||
|
|
Тогда δr = |
|
aδϕ |
|
; |
δr |
= aδϕcos30D . |
|
|||
|
|
|
|
|
|
|
|
|||||
|
|
B |
|
cos 60D |
|
C |
(cos60D )2 |
|
|
|||
Полученные перемещения подставим в (4), тогда будем иметь:
|
cos 60D |
cos30D |
2 |
||
−Mδϕ −Paδϕ |
|
+Qaδϕ |
|
|
= 0. |
cos 60D |
|
||||
|
cos 60D |
|
|
||
241
Таблица 15
Заданная схема опоры |
Эквивалентно – расчетная |
||||
|
схема |
||||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Плоская жесткая заделка
Неподвижный цилиндрический шарнир

242
При δϕ ≠ 0 , окончательно получим
M = (3Q − P)a = (3 0,5 − 0,5) 1=1Нм.
Ответ: M =1Нм.
Пример решения задачи Д. 5.2
Задана плоская (рис. 156) неподвижная конструкция, которая состоит из двух тел 1 и 2, соединенных между собой шарниром C. На раму 1 действует сосредоточенная сила P1 = 10 кН и равномерно распределенная нагрузка q = 2 кН/м, а на балку 2 – пара сил с моментом M = 6 кНм и сосредоточенная сила P2 = 8 кН.
Определить реакции опор A и B, если a = 2 м.
Рис. 156
Решение
1. Определение момента пары в заделке A (MA).
Вместо заданной жесткой заделки A показываем эквивалентнорасчетную схему (неподвижный цилиндрический шарнир A и момент MA) (рис. 157). Тогда вся конструкция становится механизмом. Рама 1 может вращаться вокруг шарнира A, поэтому эта точка и будет (МЦП)1 для рамы. Точку A соединяем с точкой C и показываем возможное ее перемещение δrC AC . При этом
δrC = AC δϕ1, где δϕ1 - возможный угол поворота рамы 1.


244
Итак, MA = 27,32кНм.
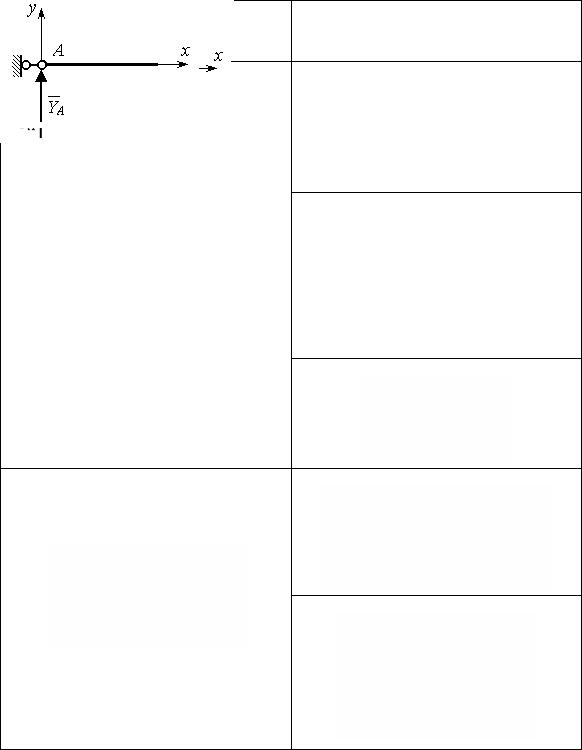
2. Определение вертикальной составляющей реакции в задел-
ке A (YA ).
Теперь точку A представим в виде ползуна, который может вместе с рамой 1 перемещаться поступательно по вертикали в своих направляющих (рис. 158). К ползуну прикладываем силу YA . Тогда вся конструкция становится механизмом.
Рис. 158
При поступательном перемещении рамы 1 возможные перемещения точек E, A и C равны, т.е. δrE = δrA = δrC . (МЦП)2 балки 2 бу-
дет находиться на опоре B, поэтому δϕ2 = δarC . Запишем уравне-
ние работ
−P1δrE cos60o +YAδrA − Mδϕ2 + P2 21 aδϕ2 = 0 .
Все возможные перемещения точек выразим через δrC
−P1δrC cos60o +YAδrC − M δarC + 21 P2a δarC = 0 .
При δrC ≠ 0 , определим YA

245
YA = Ma + P1 cos60o − 21 P2 = 62 +10 0,5 − 21 8 = 4 кН.
Итак, YA = 4 кН.
3. Определение горизонтальной составляющей реакции в задел-
ке A ( XA ) .
Вместо заделки в точке A показываем ползун (рис. 159), который может перемещаться поступательно вместе с рамой 1 в своих направляющих. К ползуну прикладываем силу XA , теперь вся конструкция становится механизмом.
Рис. 159
При поступательном перемещении рамы 1 балка 2 тоже будет перемещаться поступательно, опора B это допускает.
Составляем уравнение работ всех сил
|
|
−Pδr cos30o +Qδr |
A |
+ X δr |
A |
= 0. |
|
|
1 E |
A |
|
||
При δrE = δrA ≠ 0 находим XA |
|
|
|
|
||
X |
A |
= P cos30o −Q =10 0,866 − 4 = 4,66 кН. |
||||
|
1 |
|
|
|
|
|
Итак, XA = 4,66 кН .

246
4. Определение реакции в опоре B (RB ).
Опора B – подвижный цилиндрический шарнир. Мысленно убираем опору B и показываем вектор реакции RB , который будет перпендикулярен к балке 2. Теперь рама 1 неподвижна, а балка 2 может вращаться относительно шарнира точки C (рис. 160).
Рис. 160
Точка C будет (МЦП)2 балки 2, δϕ2 - возможный угол поворота. Составим уравнение работ моментов сил относительно (МЦП)2:
−Mδϕ2 −RBaδϕ2 + P2 32 aδϕ2 = 0 .
При δϕ2 ≠ 0, определяем |
RB : |
|
|
|
|||||||
R |
= |
3 P − |
M |
= |
3 |
8 − |
6 |
= 9 кН. |
Итак, R = 9 кН. |
||
B |
|
2 2 |
a |
|
2 |
|
2 |
|
|
B |
|
|
|
|
|
|
|
||||||
Все реакции в опорах конструкции найдены.
5. Проверка правильности полученных результатов. Изображаем всю конструкцию и показываем действующие (за-
данные) силы и реакции опор (рис. 161).
Для проверки используем уравнения статики. Если все реакции опор найдены верно, то применяя уравнения статики должны получить тождество (0 ≡ 0).

247
Рис. 161
∑Fkx = 0; |
|
|
|
|
|
|
|
|
||||
X |
A |
+Q − P cos30o |
= 0 ; 4,66 + 4 −10 0,866 = 0; |
0 ≡ 0. |
||||||||
|
1 |
|
|
|
|
|
|
|
|
|||
∑Fky = 0 ; |
|
|
|
|
|
|
|
|
||||
Y −P cos60o |
+ R |
−P = 0; |
4 −10 0,5 + 9 −8 = 0 ; |
0 ≡ 0. |
||||||||
A |
1 |
|
|
B |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
∑MC (Fk ) = 0 ; |
|
|
|
|
|
|
|
|
||||
P cos60o 3a +Q 1 a + X |
A |
a −M |
A |
−Y 2a + M + R a − |
||||||||
1 |
|
|
|
2 |
|
|
A |
B |
||||
|
|
|
|
|
|
|
|
|
|
|
||
−P2 1,5a = 0;
10 0,5 3 2 + 4 0,5 2 + 4,66 2 − 27,32 − 4 2 2 + 6 + 9 2 −8 1,5 2 = 0 ;
67,32 − 67,32 = 0; |
0 ≡ 0. |
Все реакции найдены верно. |
|
Ответ: MA = 27,32 |
кНм; XA = 4,66 кН; YA = 4 кН; RB = 9 кН. |