

Инерционная девиация гирокомпасов и способы ее снижения.
Инерционные погрешности гирокомпаса вызываются возмущающими моментами сил инерции, возникающими при ускоренном движении судна. При появлении моментов этих сил ось гирокомпаса выходит из своего положения равновесия и совершает прецессионное движение со скоростью, зависящей от значения момента силы инерции. Инерционная девиация проявляется в форме затухающих колебаний после окончания маневра судна (курсом и/или скоростью).
Образующаяся в результате маневра переменная погрешность называется инерционной погрешностью гирокомпаса. Она свойственна большинству современных гирокомпасов независимо от их конструкции.
Различают инерционную погрешность с выключенным на время маневра успокоителем и инерционную погрешность с включенным успокоителем. Первую иногда называют баллистической погрешностью первого рода, вторую (в частном случае выполнения условия апериодических переходов) — баллистической погрешностью второго рода, или погрешностью ускорения-затухания.
Инерционная девиция I рода.
Если
период собственных незатухающих
колебаний гирокомпаса
 то
то
 ,
у гирокомпаса возникает инерционная
девиация первого рода.
,
у гирокомпаса возникает инерционная
девиация первого рода.

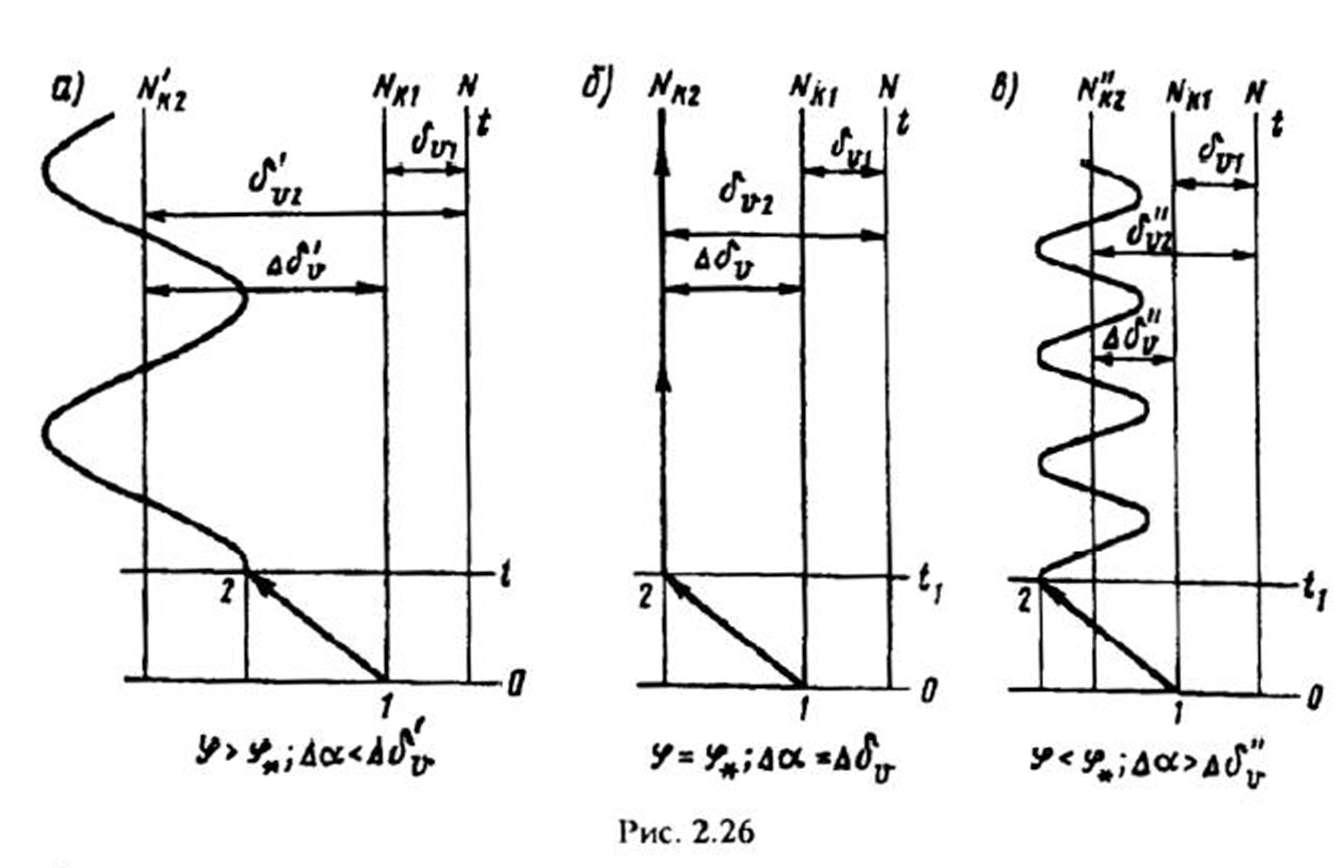
В
соответствии с физическим смыслом
и рис.2.26 формула (2.74) дает значение
девиации
 на момент времени окончания маневра,
т.е. максимальное значение.
на момент времени окончания маневра,
т.е. максимальное значение.
Получим два варианта выражений инерционной девиации I рода:
I
Вариант:

II
Вариант:

Сформулируем основные особенности инерционной девиации первого рода.
1) Причина появления — изменение северной составляющей скорости судна в условиях, когда период собственных незатухающих колебаний гирокомпаса не равен периоду М.Шулера.
2) Максимальное значение по времени — в момент завершения маневра.
3) Зависимость от широты места маневра определяется основной формулой

и
состоит в том, что если один и тот же
маневр выполняется в различных широтах,
то знаки
 в широте выше
в широте выше
 и ниже
и ниже ,
противоположны (см. рис.2.26), и чем больше
широта места маневра отличается от
расчетной широты, тем больше значение
девиации
,
противоположны (см. рис.2.26), и чем больше
широта места маневра отличается от
расчетной широты, тем больше значение
девиации .
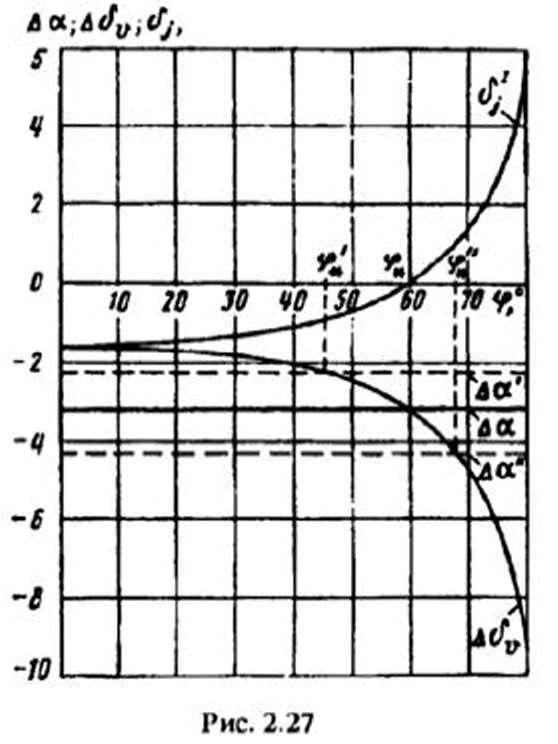
Особенно интенсивно она увеличивается,
когда
.
Особенно интенсивно она увеличивается,
когда
 >
> (рис. 2.27).
(рис. 2.27).
Представляет
интерес следующее. Изменение какого-либо
из двух параметров
(H
или
В)
чувствительного элемента гирокомпаса
соответственно вызвало бы изменение
в большую или меньшую сторону значения
величины Δα (на рис.2.27 показаны
соответствующие значения Δα’
и Δα’’),
что было бы равносильно изменению
расчетной широты гирокомпаса и имело
бы своим следствием перераспределение
значений девиации
 .
При
.
При
 девиации уменьшатся в
девиации уменьшатся в
 ,
зато
вырастут в
,
зато
вырастут в
 и соответственно, наоборот, когда
и соответственно, наоборот, когда
 .
.
Задача выбора оптимального значения расчетной широты могла бы стать актуальной, если бы какие-то достаточно крупные группы судов морского флота закреплялись за относительно узким широтным диапазоном плавания, например на трассе Северного морского пути. В настоящее время такая ситуация пока не имеет места.
Получить в «чистом» виде можно при выключении затухания перед началом маневра.
Предотвратить
возникновение можно при выполнении
равенства

Инерционная девиция II рода.
Инерционная
девиция II
рода
 возникает показаниях гирокомпаса при
маневрировании судна вследствие
воздействия сил
возникает показаниях гирокомпаса при
маневрировании судна вследствие
воздействия сил

инерции
на гидравлический маятник, выполняющий
функции успокоителя колебаний
чувствительного элемента. Обратимся к
рассмотрению поведения гиросферы,
снабженной успокоителем колебаний в
условиях, когда судно, совершая
маневр, получило ускорение
 ,
вдоль меридиана (рис.2.28). Предположим,
что маневр производится в расчетной
широте. В результате появления ускорения
к центру
G
массы гиросферы будет приложена сила
инерции
,
вдоль меридиана (рис.2.28). Предположим,
что маневр производится в расчетной
широте. В результате появления ускорения
к центру
G
массы гиросферы будет приложена сила
инерции
 .
Она
создаст момент
.
Она
создаст момент
 ,
направленный в сторону отрицательных
значений осиY
— Y.
В результате этого возникнет инерционная
прецессия гиросферы по направлению
к западу. Поскольку в расчетной широте
выполняется условие апериодических
переходов, ось ОХ из положения равновесия,
определяемого скоростной девиацией
,
направленный в сторону отрицательных
значений осиY
— Y.
В результате этого возникнет инерционная
прецессия гиросферы по направлению
к западу. Поскольку в расчетной широте
выполняется условие апериодических
переходов, ось ОХ из положения равновесия,
определяемого скоростной девиацией
 ,
(позиция 1 на рис.2.29), за время маневра
Δt
должна была бы сразу переместиться в
положение, характеризуемое величиной
,
(позиция 1 на рис.2.29), за время маневра
Δt
должна была бы сразу переместиться в
положение, характеризуемое величиной
 (точка
2
на рис.2.29). Однако этого не произойдет.
Дело в том, что сила инерции, действующая
на жидкость в успокоителе, вызовет се
перетекание в рассматриваемом случае
из северного сосуда в южный. Момент Ly2
(см. рис.2.28), создавшийся вследствие
образовавшегося избытка жидкости,
имеет противоположное по отношению к
моменту
(точка
2
на рис.2.29). Однако этого не произойдет.
Дело в том, что сила инерции, действующая
на жидкость в успокоителе, вызовет се
перетекание в рассматриваемом случае
из северного сосуда в южный. Момент Ly2
(см. рис.2.28), создавшийся вследствие
образовавшегося избытка жидкости,
имеет противоположное по отношению к
моменту от твердого маятника направление. По
этой причине за время маневра ось ОХ
гиросферы не дойдет до плоскости нового
компасного меридиана
от твердого маятника направление. По
этой причине за время маневра ось ОХ
гиросферы не дойдет до плоскости нового
компасного меридиана и к концу маневра окажется в позиции 3
и к концу маневра окажется в позиции 3
(см.
рис.2.29). Таким образом, линия
1 — 3
будет траекторией фактического движения
оси ОХ в результате одновременного
воздействия двух моментов. В момент
когда маневр окончится и ускорение
исчезнет, сразу же
исчезнет и момент силы инерции
 .
Совсем иначе обстоит дело с
моментом
от избытка жидкости
.
Совсем иначе обстоит дело с
моментом
от избытка жидкости
 .
Вспомним, что
постоянная
времени гидравлического маятника имеет
довольно большое значение (
.
Вспомним, что
постоянная
времени гидравлического маятника имеет
довольно большое значение ( = 667 с). Это означает, что еще в течение
времени,
по
крайней мере равного
= 667 с). Это означает, что еще в течение
времени,
по
крайней мере равного
 ,
будет существовать, постепенно убывая,
избыток
жидкости в том же южном сосуде. Вследствие
этого и момент Ly2
будет иметь прежний знак, в силу чего
ось ОХ гиросферы будет
отходить
все дальше от нового положения равновесия
в ту сторону, где она располагалась до
маневра (см. рис.2.29). В точке
4
отклонение достигнет максимального
значения, и гирокомпас, совершая обычные
затухающие колебания, начнет переходить
в новый компасный меридиан.
Сформулируем
основные особенности инерционной
девиации второго рода.
,
будет существовать, постепенно убывая,
избыток
жидкости в том же южном сосуде. Вследствие
этого и момент Ly2
будет иметь прежний знак, в силу чего
ось ОХ гиросферы будет
отходить
все дальше от нового положения равновесия
в ту сторону, где она располагалась до
маневра (см. рис.2.29). В точке
4
отклонение достигнет максимального
значения, и гирокомпас, совершая обычные
затухающие колебания, начнет переходить
в новый компасный меридиан.
Сформулируем
основные особенности инерционной
девиации второго рода.
1. Причины появления — наличие невыключенного демфирующего устройства гирокомпаса (гидравлического успокоителя колебаний).
2.
Максимальное значение по времени —
примерно через
 =
15
мин после окончания маневра.
=
15
мин после окончания маневра.
3. Зависимость от широты места маневра — знак первого максимума девиации и практически ее величина не зависят от широты места маневра. Максимум девиации всегда направлен в сторону того компасного меридиана, который был положением равновесия оси ОХ до начала маневра.
4. Проявление в «чистом» виде имеет место либо в расчетной широте в случае неапериодичсского гирокомпаса, либо в любой широте того диапазона, в котором компас является апериодическим.
5. Предотвратить возникновение можно при использовании на время маневра устройства выключения затухания, т.е. отключив демпфирующее устройство (реализация для гирокомпаса «Курс-4» невозможна, так как в комплекте отсутствует прибор управления выключателем затухания; в гирокомпасе «Курс-5» и «Курс-4М» указанный прибор имеется всегда).
Если
по отношению к апериодическому гирокомпасу
«Курс-5» рекомендация об использовании
выключателя затухания носит вполне
определенный и однозначный характер,
а именно: его использование с целью
предотвращения появления инерционной
девиации второго рода всегда целесообразно,
то с неапериодическим гирокомпасом
типа «Курс-4М» положение сложнее.
Поскольку инерционная девиация первого
рода, возникающая у неапериодического
гирокомпаса, имеет противоположные
знаки в зависимости от того, где
расположена широта места маневра
(выше или ниже
 ,
а инерционная девиация второго рода в
этом смысле однозначна, оптимальной
является следующая рекомендация: если
,
а инерционная девиация второго рода в
этом смысле однозначна, оптимальной
является следующая рекомендация: если
 (включая
(включая
 ,
то использование выключателя затухания
целесообразно, так как это приводит к
уменьшению суммарной инерционной
девиации, если же
,
то использование выключателя затухания
целесообразно, так как это приводит к
уменьшению суммарной инерционной
девиации, если же
 ,
то использование выключателя затухания
неэффективно.
,
то использование выключателя затухания
неэффективно.
Суммарная инерционная девиация.
Гирокомпасы,
находящиеся в эксплуатации на судах
морского и речного флота, являются
неапериодическими и, как правило, не
имеют прибора для выключения затухания.
Поэтому при маневрировании судна в их
показаниях в общем случае возникают
одновременно инерционные девиации
первого и второго рода. Это означает,
что судоводителю приходится иметь дело
с суммарной инерционной девиацией
 ,
которая
может накапливаться при повторном
маневрировании. Получение достоверных
таблиц или графиков суммарной инерционной
девиации представляет значительные
трудности, да и их применение по ряду
причин совершенно не оправдано.
,
которая
может накапливаться при повторном
маневрировании. Получение достоверных
таблиц или графиков суммарной инерционной
девиации представляет значительные
трудности, да и их применение по ряду
причин совершенно не оправдано.
Для уменьшения влияния суммарной инерционной девиации на точность судовождения можно рекомендовать судоводителям вычислять перед маневром изменение меридиональной составляющей скорости судна по формуле:

где
 ,
,
 ,
, ,
, -значения
скорости и курса судна соответственно
после и до маневра.
-значения
скорости и курса судна соответственно
после и до маневра.
Если
— 5 -7 уз, то суммарная девиация ГК
незначительна и может не приниматься
в расчет. Если
 >7
уз или предварительная оценка значения
>7
уз или предварительная оценка значения
 не производилась, то в течение 1,5—2 ч
после маневра определение места судна
следует выполнять способами, не связанными
с пеленгованием.При
отсутствии такой возможности надо
использовать не менее трех пеленгов,
взятых в течение короткого промежутка
времени, чтобы все пеленги содержали
одну и ту же погрешность, которую затем
исключить известными в навигации
способами.
не производилась, то в течение 1,5—2 ч
после маневра определение места судна
следует выполнять способами, не связанными
с пеленгованием.При
отсутствии такой возможности надо
использовать не менее трех пеленгов,
взятых в течение короткого промежутка
времени, чтобы все пеленги содержали
одну и ту же погрешность, которую затем
исключить известными в навигации
способами.