

3. Блок-схема и функциональная схема лага иэл-2м
3.1. Блок-схема
При движении судна в чувствительном элементе лага ИП возникает сигнал переменного напряжения Uип, который представляет из себя сумму полезного напряжения, пропорционального скорости, и напряжения квадратурной помехи. СигналUиппоступает в прибор 29 (рис. 3.1), в котором находится предварительный усилитель УП, решающий задачу согласования выходного сопротивления индукционного преобразователя с входным сопротивлением усилителя измерительного канала УИК. В блоке УИК происходит усиление сигнала, а также отделение от него и подавление квадратурной помехи. Оставшийся полезный сигнал преобразуется в отрицательное напряжение –Uс, которое пропорционально скорости судна. Данное напряжение поступает в преобразователь "напряжение – время" (ПНВ). В этот же преобразователь из усилителя опорного канала УОК подается постоянное напряжениеUопс положительным знаком. Опорное напряжениеUопвырабатывается в приборе питания (прибор 3). В блоке ПНВ методом двойного интегрирования при помощи сигналов –Uси +Uопсоздается прямоугольный импульс, длительностькоторого пропорциональна скорости суднаV.
Для измерения значения скорости Vслужит преобразователь "время – цифра" ПВЦ. В нем происходит заполнение импульсачастотойfо = 250 кГц
о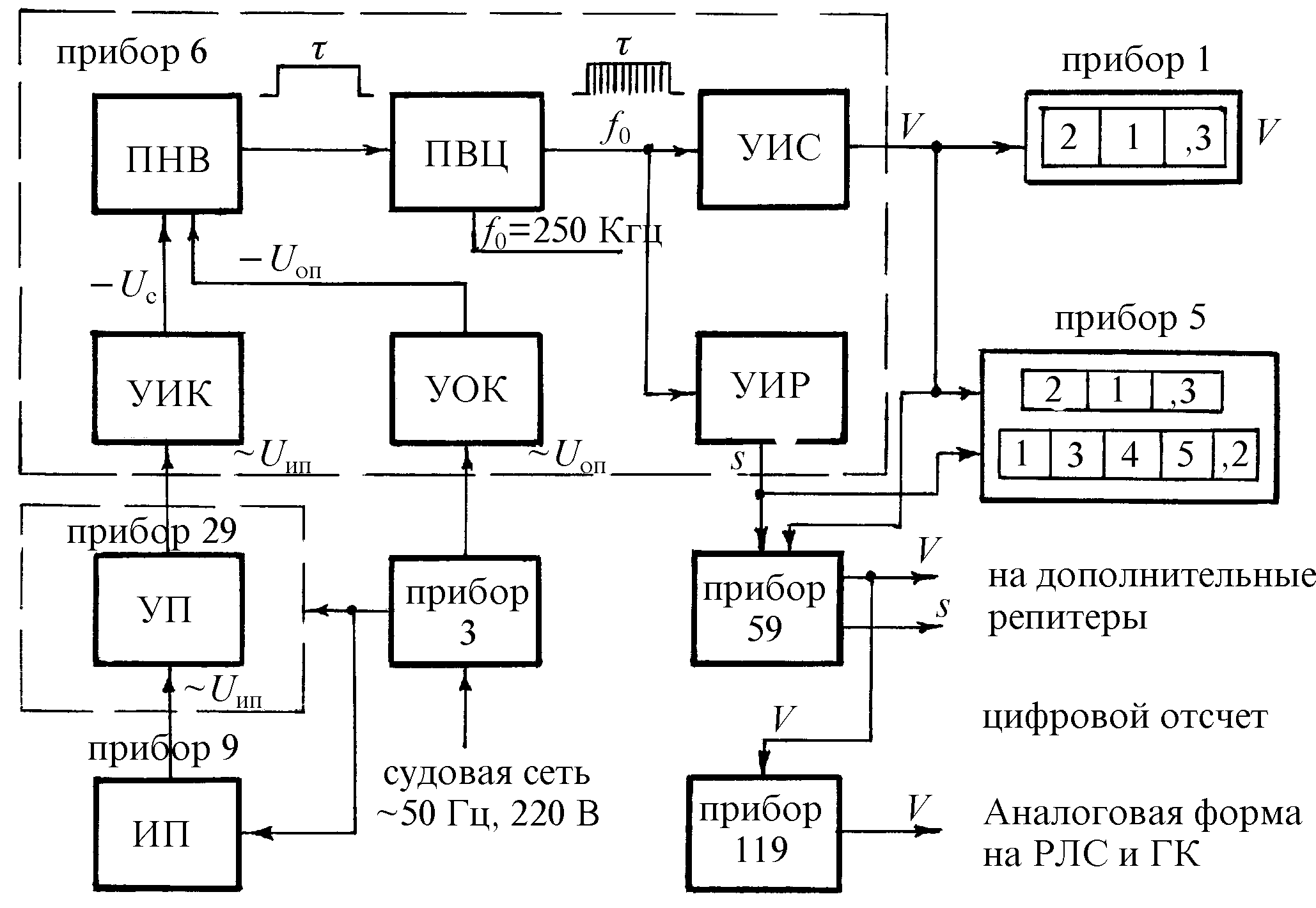 т
опорного генератора. Очевидно, что чем
больше скорость, тем продолжиРис.
3.1
т
опорного генератора. Очевидно, что чем
больше скорость, тем продолжиРис.
3.1
тельнее и, следовательно, тем большее количество импульсов опорной частоты уместится в этом промежутке времени. По данной информации в устройстве индикации скорости УИС на цифровом табло прибора 6 вырабатывается и высвечивается значение скорости, а в устройстве индикации расстояния УИР – значение пройденного расстоянияs. Эти же данные через трансляционные приборы 59 и 119 подаются на репитеры и другим потребителям.
3.2. Функциональная схема
Функциональная схема подразделяется на следующие основные части: аналоговая часть (АЧ); преобразователь "напряжение – время" (ПНВ); преобразователь "время – цифра" (ПВЦ).
3.2.1. Аналоговая часть. В аналоговую часть входят предварительный усилитель УП, усилитель измерительного канала УИК и усилитель опорного канала УОК (рис. 3.2).
1. Предварительный усилитель предназначен для согласования выходного сопротивления индукционного преобразователя с входным сопротивлением усилителя измерительного канала УИК. В состав блока УП входят два операционных усилителя 29А1 и 29А2, а также два реле 29К1 и 29К2, имеющих соответствующие контакты. Управление этими реле производится переключателем 6S1 режимов работы лага, расположенным в приборе 6.
В режиме "Работа" (положение 1 переключателя) обмотки реле обесточены, их контакты замкнуты так, как показано на схеме, и на вход УП подается сигнал ~ Uип. Лаг в этом случае показывает скорость судна.
В положении 2 "Калибровка" на обмотку реле 29К1 подается постоянный ток напряжением 15 В. Его контакты 29К1-1 и 29К1-2 переключаются в нижнее (по схеме) положение, и вход предварительного усилителя замыкается накоротко. Это означает полное отсутствие напряжения и лаг должен показывать нулевое значение скорости (допустимая величина 0,1 узла).
В противном случае регулировкой резистора 6R6 необходимо добиться допустимого значения. Так исключаются погрешности вычислительной схемы (см. 1.3.1).
В положении 3 "Масштабирование" напряжение подается на реле 29К2. Его контакты 29К2-1 и 29К2-2 переходят вниз (по схеме), и на вход УП подается эталонное напряжение с резистора 3R1. Лаг должен показывать эталонное значение скорости, определенное на мерной линии и записанное на матовом стекле в приборе 6.
Резисторы 29R20, 29R21, 29R22 служат для ступенчатого изменения коэффициента усиления УП при регулировке лага на мерной линии, когда новое эталонное значение скорости вышло за пределы их возможной установки с помощью резисторов "Грубо" и "Плавно" (см. 2.2). Схема контроля СК позволяет определить наличие сигнала с помощью лампы 29Н1.
В дальнейшем для изложения работы схемы полезно рис. 3.2 и рис. 3.3 рассматривать одновременно.
2. Блок усилителя
измерительного канала УИК имеет два
операционных усилителя 6А2 и 6А5. Из
предварительного усилителя сигнал Uип,
состоящий из суммы полезного сигналаUп, пропорционального
скорости и квадратурной помехиUк,
поступает на вход 6А2. С его выхода сигнал
идет на электронный ключ 6А7.1 и на вход
6А5. Данный усилитель является инвертирующим,
он изменяет фазу сигнала на 180° и подает
его на ключ 6А7.2. Таким образом, на данных
электронных ключах постоянно присутствуют
одни и те же напряжения, сдвинутые по
фазе относительно друг друга на 180°
(рис. 3.3).

ем усилителя измерительного канала УИК. В состав блока УП входят два операционных усилителя 29А1 и 29А2, а также два реле 29К1 и 29К2, имеющих соответствующие контакты. Управление этими реле производится переключателем 6S1 режимов работы лага, расположенным в приборе 6.
В режиме "Работа" (положение 1 переключателя) обмотки реле обесточены, их контакты замкнуты так, как показано на схеме, и на вход УП подается сигнал ~ Uип. Лаг в этом случае показывает скорость судна.
В положении 2 "Калибровка" на обмотку реле 29К1 подается постоянный ток напряжением 15 В. Его контакты 29К1-1 и 29К1-2 переключаются в нижнее (по схеме) положение, и вход предварительного усилителя замыкается накоротко. Это означает полное отсутствие напряжения, и лаг должен показывать нулевое значение скорости (допустимая величина 0,1 узла).
В противном случае регулировкой резистора 6R6 необходимо добиться допустимого значения. Так исключаются погрешности вычислительной схемы (см. 1.3.1).
В положении 3 "Масштабирование" напряжение подается на реле 29К2. Его контакты 29К2-1 и 29К2-2 переходят вниз (по схеме), и на вход УП подается эталонное напряжение с резистора 3R1. Лаг должен показывать эталонное значение скорости, определенное на мерной линии и записанное на матовом стекле в приборе 6.
Резисторы 29R20, 29R21, 29R22 служат для ступенчатого изменения коэффициента усиления УП при регулировке лага на мерной линии, когда новое эталонное значение скорости вышло за пределы их возможной установки с помощью резисторов "Грубо" и "Плавно" (см. 2.2). Схема контроля СК позволяет определить наличие сигнала с помощью лампы 29Н1.
В дальнейшем для изложения работы схемы полезно рис. 3.2 и рис. 3.3 рассматривать одновременно.
2. Блок усилителя измерительного канала УИК имеет два операционных усилителя 6А2 и 6А5. Из предварительного усилителя сигнал Uип, состоящий из суммы полезного сигнала Uп, пропорционального скорости и квадратурной помехи Uк, поступает на вход 6А2. С его выхода сигнал идет на электронный ключ 6А7.1 и на вход 6А5. Данный усилитель является инвертирующим, он изменяет фазу сигнала на 180° и подает его на ключ 6А7.2. Таким образом, на данных электронных ключах постоянно присутствуют одни и те же напряжения, сдвинутые по фазе относительно друг друга на 180° (рис. 3.3).
Рассмотрим подавление квадратурной помехи методом синхронного детектирования. Управление электронными ключами производится с помощью нуль-органа НО1, который синхронно с полезным сигналом подает на них прямоугольные импульсы. Допустим, в момент времени, обозначенный на диаграмме "0", замкнут ключ 6А7.2, а 6А7.1 разомкнут, следовательно, на вход фильтра Z1 поступает сигнал с инвертора 6А5. В следующий полупериод импульс нуль-орган замыкает ключ 6А7.1 и размыкает 6А7.2. Теперь на вход Z1 поступает сигнал с усилителя 6А2. Следующим импульсом нуль-орган переключает ключи в первоначальное положение. Благодаря поочередному подключению ключей на входе фильтра Z1 образуется пульсирующее напряжение полезного сигнала Uсодного знака (отрицательное) и знакопеременное напряжение квадратурной помехи. Фильтр работает по принципу интегратора. Это означает, что вначале суммируется отрицательный сигнал квадратурной помехи, а затем его компенсирует положительная частьUк. Таким образом, на выходе фильтра Z1 квадратурная помеха отсутствует. Напряжение полезного сигналаUссглаживается. В конечном итоге с выхода Z1 в схему ПНВ идет напряжение постоянного токаUс, пропорциональное скоростиVсудна.
Из схемы (рис. 3.2) видно, что нуль-орган НО1 работает синфазно с полезным сигналом, так как его питание и питание электромагнита производится от одного источника.
3. Усилитель опорного канала УОК предназначен для выработки опорного напряжения постоянного тока Uоп(положительного) и создания прямоугольных импульсов для управления ключами. В его состав входят два операционных усилителя 6А3 и 6А4, электронные ключи 6А8.1 и 6А8.2, нуль-орган НО1 и фильтр Z2.
Опорное напряжение переменного тока Uопснимается с резистора 3R1, который соединен последовательно с электромагнитом. Затем оно подается на усилители. Очевидно, что на их входе, а следовательно, и на выходе напряжение сдвинуто по фазе на 180°, так как они подключены к разным проводам. По импульсу НО1 в нулевой момент времени (рис. 3.3) замкнут ключ 6А8.1, а ключ 6А8.2 разомкнут. На вход фильтра Z2 поступает положительная составляющая ~Uоп. В следующий полупериод положительная часть этого напряжения будет уже на ключе 6А8.2, который в это время замкнут по сигналу НО1, а 6А8.1 разомкнут. Таким образом, последовательное подключение ключей обеспечивает прохождение на вход фильтра Z2 пульсирующего напряжения одного знака. Фильтр выпрямляет данное напряжение и подает в преобразователь "напряжение – время" ПНВ.
Нуль-орган НО1 представляет собой пороговую схему, срабатывающую при переходе подаваемого на вход синусоидального напряжения Uопчерез нулевой уровень, и предназначен для выработки прямоугольных импульсов, управляющих ключами.
Схема НО1 имеет два выхода: один прямой, второй – через инвертор, поэтому импульсы на обоих выходах отличаются по фазе на 180°. Из диаграммы (рис. 3.3) видно, что в один и тот же момент с выходов нуль-органа снимаются импульсы, противоположные по знаку. Положительные импульсы прямого выхода открывают ключи 6А7.2 и 6А8.1, отрицательные – запирают их. С инверсного выхода сигналы идут на ключи 6А7.1 и 6А8.2, которые срабатывают в обратном порядке с предыдущими ключами.
3.2.2. Аналого-цифровой преобразователь. В аналого-цифровой преобразователь АЦП входят блоки: ПНВ – преобразователь "напряжение – время"; ПВЦ – преобразователь "время – цифра".
1. Блок ПНВ предназначен для преобразования сигнала Ucво временной интервал1, пропорциональный скорости. Указанное преобразование производится методом двойного интегрирования: вначале интегрируется отрицательное напряжение полезного сигналаUc, а затем положительное напряжение опорного каналаUоп.
Состав ПНВ: генератор прямоугольных импульсов ГПИ; электронные ключи 6А9, 6А10.1, 6А10.2, 6А11.1, 6А11.2; схема управления ключами СУ; интегрирующий усилитель 6А15: нуль-орган НО2, представляющий собой триггерную схему, срабатывающую при достижении на ее входе порогового напряжения Uо.
Ритм работы преобразователя, а с ним и всей схемы лага задает ГПИ, с которого в схему управления ключами СУ поступают синхронизирующие импульсы длительностью 0,5 мкс и периодичностью 8 Гц.
На рис. 3.2 показано исходное положение вышеперечисленных электронных ключей. В момент времени t1(рис. 3.3) синхронизирующий импульс от генератора начинает цикл работы ПНВ, размыкая ключи 6А9, 6А10.2 и замыкая ключ 6А11.2. Тем самым на усилитель 6А15 подается отрицательное напряжение с делителя 6R40 – 6R42. Поскольку данный усилитель интегрирующий, то на его выходе, подключенном к входу НО2, происходит накапливание напряжения на конденсаторе 6С32. Когда оно достигает значенияUо, то нуль-орган НО2 срабатывает (моментt2) и с его выхода идет прямоугольный импульс, передний фронт которого размыкает ключ 6А11.2 и замыкает ключ 6А10.1. В результате отрицательный полезный сигналUс, пропорциональный скорости, проходит на 6А15, накапливаясь на том же конденсаторе 6С32.
В этот же момент времени t2блок СУ начинает формировать другой прямоугольный импульс с фиксированной длительностью= 18 мкс. В момент времениt3задний фронт импульса размыкает ключ 6А10.1 и замыкает ключ 6А11.1. Таким образом, за время= 18 мкс конденсатор зарядится полезным сигналом –Uсна величину, пропорциональную скорости судна. Очевидно, что чем больше скоростьV, тем больше сигнал –Uс, тем до большей величины зарядится конденсатор. Так происходит интегрирование полезного сигнала.
В момент времени t3через ключ 6А11.1 на вход усилителя 6А15 подается положительное опорное напряжение. Поскольку оно имеет противоположный полезному сигналу знак, то конденсатор начинает разряжаться, формируя передний фронт нового импульса1. Когда конденсатор разрядится до уровняUо(момент времениt4), срабатывает нуль-орган НО2, образуя задний фронт импульса1, который через схему управления ключами СУ приводит их в исходное (первоначальное) положение, то есть размыкает ключ 6А11.1 и замыкает ключи 6А9 и 6А10.2. Через последний конденсатор разряжается на корпус до нуля (момент времениt5), и схема ПНВ окончательно готова к новому циклу. Следует отметить, что создание импульса1происходит интегрированием –Uоп. Длительность1тем больше, чем больше заряд конденсатора, который пропорционален скоростиV. Следовательно,1~V.
Достоинством рассмотренной схемы является независимость длительности 1, а значит, и показаний лага от изменения напряжения судовой сети. Действительно, за время0происходит зарядка конденсатора 6С32 до величиныUc~0. Разрядка происходит за время1на величинуUоп~1.
Очевидно, что 0·Uc =1·Uоп.
Допустим, что
произошло изменение напряжения питания
на К %, то есть достигло величины
 .
На такую же величину в процентном
отношении изменяются и зависящие от
негоUcиUоп. Следовательно,
.
На такую же величину в процентном
отношении изменяются и зависящие от
негоUcиUоп. Следовательно,
 .
.
Это выражение показывает, что временной интервал 1не зависит от колебаний напряжения судовой сети.
Нуль-орган НО2 с момента первого срабатывания до момента второго срабатывания формирует импульс =0+1. Схема управления ключами СУ исключает из него постоянный временной интервал0= 18 мс. Выходной сигнал блока ПНВ в виде прямоугольного импульса1=nVподается на вход преобразователя "время – цифра" (ПВЦ). Здесьn– коэффициент пропорциональности, зависящий от конструктивных параметров схемы.
2. В блоке ПВЦ имеется ждущий мультивибратор МВЖ, который вводится в действие установкой переключателя 6S1 (рис.2.4, 3.2, 4.1) в положение "Ручной ввод". Мультивибратор формирует прямоугольные импульсы, длительность которых регулируется переменным резистором 6R1 с помощью специальной рукоятки. Данные искусственно созданные импульсы поступают через схему управления ключами СУ на цифровой фильтр для выработки отсчета введенной скорости и пройденного расстояния.
3.2.3. Преобразователь "время – цифра". Преобразователь "время – цифра" (ПВЦ) служит для преобразования прямоугольных импульсов длительностью1=nV, поступающих из ПВЦ, в отсчеты скоростиVи пройденного расстоянияS. В состав ПВЦ входят цифровой фильтр ЦФ, корректор К, устройство индикации скорости УИС, устройство индикации расстояния УИР (рис. 3.2).
Преобразователь работает следящим образом. Импульсы 1с частотой следования 8 Гц из схемы управления ключами СУ поступают на вход цифрового фильтра ЦФ. В нем происходит осреднение величин импульсов за промежуток, равный постоянной времени фильтра, и вырабатывается средний прямоугольный импульсср. Таким образом, ЦФ значительно снижает случайную погрешность измерения скорости (см. 1.3.3). С увеличением волнения моря значение случайных погрешностей возрастает, поэтому в фильтре предусмотрено увеличение постоянной времени (времени осреднения), для этого достаточно переключить тумблер 6S3 в положение 2. Стробсрзаполняется в ЦФ счетными импульсами от ГПИ с частотойf0= 250 кГц.
В схеме предусмотрено также исключение из показаний лага систематических погрешностей. Для этой цели служит корректор К, который работает по программе, заданной по результатам испытаний лага на мерной линии (см. гл. 5). Программа определяется характером и величиной поправок лага и вводится в действие дискретно через один узел. Сигнал сриз цифрового фильтра поступает на схему И, откуда через делитель К = 100 передается на корректор К, который вырабатывает импульсы дополнительной частотыfдоп, пропорциональные поправке лага при данной скорости судна.
С помощью схемы И производится исправление частоты (f0+fдоп) в импульсеср, который поступает в устройство индикации скорости УИС на счетчик импульсов СИ. Последний преобразует информацию в двоично-десятичный код и передает на регистр памяти РП. Одновременно с генератора прямоугольных импульсов ГПИ на регистр памяти поступают управляющие импульсы, которые определяют периодичность индикации скорости 1 Гц. Поскольку частота следования импульсовсрравна 8 Гц, то за 1 с (период обновления информации) счетчик импульсов посчитает количество заполняющих импульсов как величину, равную 8 (f0+fдоп). По этой причине на пути к СИ эта информация проходит делитель К = 8. В результате деления на 8 не только решается задача правильного подсчета импульсов в СИ, но и происходит дополнительное осреднение информации о скорости.
С выхода регистра памяти код скорости подается на дешифратор, который в соответствии с измеренной скоростью включает лампы на цифровом табло.
Устройство индикации расстояния УИР решает задачу интегрирования скорости, то есть подсчитывает общее число импульсов, идущих пачками с выхода схемы И на делитель с коэффициентом деления К = 720. В нем вырабатываются свои счетные импульсы через определенное количество импульсов частоты f0+fдоп. Пятьсот вновь полученных счетных импульсов соответствуют пройденному расстоянию в 1 милю (один импульс пропорционален 0,002 мили). Данные импульсы после усиления по мощности в 6А16 подаются на шаговый двигатель 6М2, который через редуктор приводит в действие механический счетчик пройденного расстоянияS. Для индикации скорости с дискретностью 0,1 узла в цифровом указателе формируются пачки по 50 импульсов.
Выключателями 6S2 и 6S4 (переводом их в положение "2" соответственно) корректор и счетчик пройденного расстояния могут быть отключены.