12. Временные хар-ки. Типовые входные воздействия. Переход функция. Импульсн переход функция. Рамповая переход функция. Переход хар-ка, импульс переход хар-ка, рампов переход хар-ка.
Временной хар-кой звена назыв закон измен выходной величины звена во времени y(τ) в ответ на изменение входного воздействия х(τ) при условии, что до приложения входного воздействия звено находилось в покое.
Типовые
входные воздейст.
Единич
ступенчатое воздействие
описыв единич ступенчат функцией
(Хевисайда):
 изображение которой по Лапласу
L[1(τ)]=1/s.(а)
Единич
импульсное воздействие
описыв единич импульс функцией
(дельта-функц ДирАка):
изображение которой по Лапласу
L[1(τ)]=1/s.(а)
Единич
импульсное воздействие
описыв единич импульс функцией
(дельта-функц ДирАка):
 ,
,
 Эта функция не имеет графика с точки
зрения классич мат анализа. Ее можно
рассматр как предел послед-ти импульсов
длительного ∆τ и амплитудой 1/∆τ при
∆τ->0 (б). Единичной рамповое воздейст
( с постоянной скоростью) описыв единич
рампов функцией:
Эта функция не имеет графика с точки
зрения классич мат анализа. Ее можно
рассматр как предел послед-ти импульсов
длительного ∆τ и амплитудой 1/∆τ при
∆τ->0 (б). Единичной рамповое воздейст
( с постоянной скоростью) описыв единич
рампов функцией: ,
изображение которойL[τ*1(τ)]=1/s2
(в).
,
изображение которойL[τ*1(τ)]=1/s2
(в).

Переходная функция – аналитич выражение отклика звена на единич ступенчатое входное воздействие при нулевых начальн условиях: h(τ)=L-1[W(s)*1/s]. L-1- символ обрат преобраз Лапласа. Графич изображ переход функции –переход хар-ка. График изменения выходного сигнала при ступенчат входном воздейст, отличающ по величине от единичного, - кривая разгона. Импульсная переходная функция ( функция веса) – аналитич выраж отклика звена на единич импульсн входн воздейст при нулевых начальн условиях: w(τ)=L-1[W(s)*1]. Графич изображ импульс перех функции – импульс переход хар-ка (весовая). Рамповая перех функция – аналит выраж отклика звена на единич рамповое воздействие при нулевых нач услов: у(τ)=L-1[W(s)*1/s2]. Графич изображ – рамп перех хар-ка. Переходная, импульс и рамповая функции яв частными случаями временных хар-к.
13. Частотные хар-ки. Частотная передаточ функция. Частотный анализ систем управ.
Реакцию САУ или отдельн ее эл-тов на гармонич входное воздейст выраж с помощью частот хар-к. Их определяют в установившихся колебат режимах. Они связаны со структурой и св-вами систем управ. Отличит особенностью частотных методов яв робастность (грубость). Синтезир с их помощью система управ сохран требуемые хар-ки, несмотря на небольш различия между моделью, на основе котор выполн проектирование, и реальной системой управ. Частотные хар-ки можно получить на основе мат модели САУ и экспериментально. Частотные методы позвол получить хар-ку системы в целом по хар-кам отдельн эл-тов системы независимо от их числа. Частот хар-ки позвол опред тип регулятора, и просто решить задачу об устойчивости САУ. Если на вход устойчив линейн стационар динам звена подать гармонич сигнал с частотой w и амплитудой Aх х(τ)= Aх sin(wτ)*1(τ), то после заверш переход процесса в установиш режиме выход величина динам звена будет соверш вынужд гармонич колебания с частотой w, но с иной амплитудой Aу и сдвинутые по фазе относит входн колебаний на угол φ: увын(τ)= Aуsin(wτ+φ). Положит знач φ означ опережение по фазе, отриц – отставание. Определяя в установивш режиме отнош амплитуды выходн колеб к амплитуде входн колеб Aу/Aх и фазов сдвиг φ при разных частотах колеб входн сигнала (0<w<∞), можно эксперимент получить частотные хар-ки динам звена. Зависим-ть отнош амплитуды Aу/Aх от частоты колебаний w назыв амплитудно-частотной хар-кой (АЧХ) и обознач A(w). Зависим-ть фаз сдвига φ между выход и вход колеб от частоты w – фазово-частот хар-ка (ФЧХ) и обознач φ(w).
Частотная передаточ функция. Гармонич сигнал подан на вход устойчив линейн стацион динам звена, опис дифф ур-нием: dny(τ)/dτn+…а0у(τ)=bm(dmx(τ)/dτm)+…+b0x(τ). Передаточ функция: W(s)=Y(s)/X(s)=(bmsm+…+b0)/(sn+…a0)=(bmsm+…+b0)/((s-p1)+…+(s-pn)), p1…pn-корни хар-кого ур-ния: sn+…a0=0, назыв также полюсами передат функции. Изображ входного сигнала: X(s)=L[x(τ)]=L[Axsin(wτ)*1(τ)]=Axw/(s2+w2). У(s)=W(s)*X(s)=W(s)*Axw/((s-jw)(s+jw)); j=√(-1).
Y(s)=c1/(s-p1)+…cn/(s-pn)+cn+1/(s-jw)+cn+2/(s+jw). Приравниваем оба выражения W(s)*Axw/((s-jw)(s+jw))=c1/(s-p1)+…cn/(s-pn)+cn+1/(s-jw)+cn+2/(s+jw) (1) и по изображ выход сигнала наход реакц динам звена на гармонич входн воздейст, выполнив обрат преобраз Лапласа: у(τ)=L-1c1/(s-p1)+…L-1cn/(s-pn)+L-1cn+1/(s-jw)+L-1cn+2/(s+jw)=c1ep1τ+…+cnepnτ+cn+1ejwτ+cn+2e-jwτ=yс(τ)+yвын(τ), где yс(τ)- собствен движ системы, зависящ от начальн услов, и стремится к 0, а yвын(τ)- вынужд движ в установиш режиме, зависящ от вход воздейст. Для определ постоян величины сn+1, уможим обе части равенства (1) на (s-jw): W(s)*Axw/(s+jw)=c1(s-jw)/(s-p1)+…cn(s-jw)/(s-pn)+cn+1(s-jw)/(s-jw)+cn+2(s-jw)/(s+jw). Положим, что s=jw. Тогда сn+1=W(jw)*Axw/(jw+jw)=W(jw)*Ax/(2j). Умножив обе части ур-ния (1) на (s+jw) и принимая s=-jw: сn+2= W(-jw)*Ax/(-2j). => сn+1 и сn+2 яв комплекс сопряж числами: сn+1= (Ax/(2j))*│W(jw)│ejargW(jw); сn+2= (Ax/(-2j))*│W(-jw)│ejargW(-jw)=(Ax/(-2j))*│W(jw)│e-jargW(jw).
Увын(τ)=Ax*│W(jw)│{ej[wτ+argW(jw)]-
e-j[wτ+argW(jw)]}.
Применим к выраж в фигур скобках формулу
Эйлера: cosφ+jsinφ=ejw.
Получаем:
Увын(τ)=Ax*│W(jw)│sin[wτ+argW(jw)]=Ay(w)sin[wτ+φ(w)].
При гармонич входн воздейст после
заверш переход процесса выход величина
динам звена также соверш гармонич колеб
с частотой, равной частоте вход колеб.
Колеб выход величины смещены по фазе
относит колеб вход сигнала на
φ(w)=argW(jw).
Отнош амплитуд: A(w)=Ay(w)/Ax=│W(jw)│.
W(s)│s=jw=W(jw)
– частот
передаточ функция,
или передат ф-ция по Фурье. Ее можно
представить в виде суммы действит и
мнимой частей: W(jw)=m(w)+jn(w), или в показательной
форме: W(jw)=A(w)ejφ(w).
m(w) и n(w) – действит и мнимая частот
хар-ки звена, А(w) и φ(w)-
амплитуд частот и фазов частот хар-ки.


Графич представление. Амплитудно-частот хар-ка и фазов-частот могут быть построены в линейн декарт корд, но удобнее использ логарифмич хар-ки. По оси абсцисс отклад частоту в логарифм масштабе, те наносят отметки, располож на расст lgw от начала корд, а возле отметок пишут само знач частоты w, выраж в радианах в ед времени. Также и с A(w). При построении логарифм фазово-частот хар-ки по оси абсцисс откалаж частоту так же, а по оси ординат – φ(w) в радианах.
Термины,
использ при частот анализе.
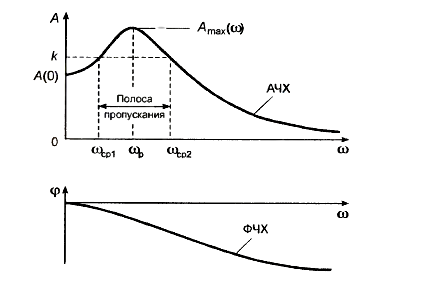
Показ-ль
колебательности
M=Amax(w)/A(0) хар-т склонность системы к
колебаниям. Система с М<1 обладает
апериодич переход хар-кой. Чем больше
М, тем слабее затух в системе колеб, и
тем ближе система к границе устойчив.
Резонанс
частота
wp
– частота, при котор АЧХ имеет max:
A(wp)=Amax(w).Полоса
пропускания
– интервал частот wcр1≤w≤
wcр2,
в котор выполн условие: k<A(w)<Amax(w), k –
положит дейст число (0≤k≤Amax(w)).Частоты,
соотв границам полосы пропускания,-
частоты
среза
wср.