

Лабораторна робота № 2
Вивчення та аналіз експлуатаційних показників трактора
Мета роботи. Засвоїти методику кількісної оцінки впливу потужності двигуна, вибраної передачі, конструкції ходової частини на тягові властивості трактора в залежності від агрофону, стану ґрунту і нахилу місцевості.
Вихідні дані для виконання роботи наведені в таблиці 2.4 [1].
2.1 Визначення тягового балансу трактора та його складових
Показники роботи тракторів визначають під час руху на кожному агрофоні окремо. Всі розрахунки для вказаних передач виконують у нижче наведеній послідовності.
Номінальну дотичну силу тяги Рд на ободі ведучого колеса розраховують для всіх заданих передач трактора [3]:
Рд
=
![]() (Н), (2.1)
(Н), (2.1)
де Nен – нормальна потужність двигуна (кВт)
(табл. 2.2 – для колісних тракторів,
табл. 2.3 – для гусеничних тракто-рів);
ітр - передаточне число трансмісії (табл. 2.2, 2.3);
м – механічний коефіцієнт трансмісії (для колісних
тракторів м = 0,91...0,92, а для гусеничних з урахуванням втрат на тертя в шарнірах гусениці м = 0,86...0,88; для трактора ДТ-175С при увімкненому гідротрансформаторі м =0,86, заблокованому - м = 0,96);
nн – номінальна частота обертання колінчастого вала (хв-1)
(табл. 2.2, 2.3);
rк – радіус кочення ведучого колеса (зірочки) трактора (м)
(табл. 2.2, 2.3).
Для колісних тракторів на пневматичних шинах:
rк=rо+ h·λ (м), (2.2)
де rо – радіус обода колеса (м) (табл. 2.2, 2.3); для гусенич-них тракторів радіус початкового колеса ведучого колеса дорівнює радіусу початкового кола зірочки;
h – висота профілю шини (м) (табл. 2.2);
λ – коефіцієнт усадки ведучих коліс для пневматичних шин низького тиску дорівнює 0,75...0,80.
Нормальну силу зчеплення Рз ведучого механізму трактора з ґрунтом визначають за формулою:
Рз = Gз (кН), (2.3)
де - коефіцієнт зчеплення ведучого механізму з ґрунтом
(табл. 2.1);
Gз – сила тяжіння трактора, що припадає на ведучі колеса
(кН) (табл. 2.2, 2.3).
Для колісного трактора з однією ведучою віссю:
Gз![]() (кН), (2.4)
(кН), (2.4)
де G – сила тяжіння трактора (кН).
Рушійну
силу Рруш
знаходять порівнянням числових значень
номінальної дотичної сили Рд
і
номінальної сили зчеплення Рз
(на
передачах
з урахуванням умов ґрунту). Рушійна
сила Рруш
дорівнює меншій з них Рд
![]() Рруш
Рруш
![]() Рз
[3].
Рз
[3].
При
Рд
![]() Рз
зчеплення
достатнє і Рруш
= Рд
, а при Рд
>
Рз
– недостатнє і Рруш
= Рз.
В першому випадку Рд
може бути
повністю використана для тягової роботи,
а в другому –
тільки частка її, яка дорівнює Рз.
Рз
зчеплення
достатнє і Рруш
= Рд
, а при Рд
>
Рз
– недостатнє і Рруш
= Рз.
В першому випадку Рд
може бути
повністю використана для тягової роботи,
а в другому –
тільки частка її, яка дорівнює Рз.
Опір коченню трактора визначаємо за формулою:
Рf = f G (кН), (2.5)
де f – коефіцієнт опору кочення трактора (табл. 2.1).
Опір руху трактора Р на місцевості з кутом схилу визначають:
Р
=
G
sin
=
G
![]()
G
G ![]() (кН), (2.6)
(кН), (2.6)
де – схил місцевості (градус);
h, l – відповідно висота і довжина підйому (м);
і – нахил місцевості (%).
Знак “+” у формулі береться при русі трактора вгору, “-” – при русі вниз.
На кожній з передач визначаємо тягове зусилля трактора Рт:
Рт = Рруш – Рf - Р (кН), (2.7)
де Рруш – рушійна сила (кН);
Рf - опір коченню трактора (кН);
Р - опір руху трактора (кН).
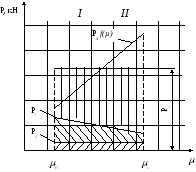
Рис. 2.1. Графік тягового балансу трактора:
І – зона недостатнього зчеплення (Рд > Рз );
ІІ
– зона достатнього зчеплення
(Рд
![]() Рз
)
Рз
)
Графік тягового балансу трактора (рис. 2.1) будують в прямокутних координатах. По осі абсцис відкладають значення коефіцієнта зчеплення ведучого рушія з ґрунтом, а по осі ординат – значення складових тягового балансу Рд, Рз, Рf, Р для двох станів поля при роботі на одній передачі. На графіку тягового балансу відмічають зони достатнього та недостатнього зчеплення, а також силу тяги трактора Рт.