

MP_praktikumNG
.pdfОпределение натуральной величины плоской фигуры
Пример 31
Определить натуральную величину ∆ АВС способом вращения
(рис. 2.31).
Рис. 2.31.
Алгоритм решения
Показаны две стадии поворота ∆ АВС, расположенного в плоскости общего положения, с целью получения натурального вида этого треугольника. Действительно, он в последнем своем положении параллелен пл. π2 и, следовательно, проекция А2''В2''С2'' представляет собой натуральный вид треугольника. Чтобы получить такое положение, надо предварительно повернуть плоскость так, чтобы эта плоскость оказалась перпендикулярной к пл. π1. А для этого надо взять фронталь и повернуть ее до перпендикулярности к π1. при этом повороте подразу-
80
мевается ось вращения, перпендикулярная к пл. π2; поэтому горизонтальная проекция треугольника сохраняет свой вид и величину. При втором повороте, приводящем треугольник в параллельное пл. π1 положение, фронтальная проекция при повороте сохраняет вид и величину, полученные во второй стадии поворота, точки А, В и С перемещаются в плоскостях, параллельных пл. π1.
Пример 32
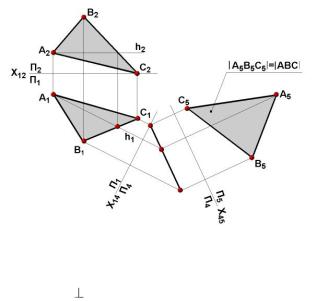
Определить натуральную величину ∆ АВС общего положения способом замены плоскостей проекций (рис. 2.32).
Рис. 2.32
Алгоритм решения
1. Проведем горизонталь. Введем дополнительную плоскость проекций π4 к горизонтали. Проекция треугольника на π4 превращается в прямую линию.
2.Вводим дополнительную плоскость проекций π5 // А4С4.
3.Проекция ∆ АВС на π5 есть натуральная величина. Плоскость общего положения преобразовать в плоскость
уровня заменой только одной плоскости проекций нельзя, так как плоскость π4, параллельная ей, не будет перпендикулярна ни одной из старых плоскостей проекций и, следовательно, не образует ни с одной из них прямоугольной системы плоскостей проекций.
81
Для того чтобы плоскость общего положения преобразовать в плоскость уровня, необходимо выполнить две последовательные замены плоскостей проекций.
Вначале плоскость необходимо преобразовать в проецирующую, а затем проецирующую плоскость преобразовать в плоскость уровня. На рис. 2.32. показано преобразование плоскости ∆ АВС в горизонтальную плоскость уровня. Преобразуйте плоскость общего положения во фронтальную плоскость уровня (исходный чертеж задайте самостоятельно).
Пересечение многогранника плоскостью
При пересечении многогранника плоскостью в сечении получается плоская фигура (называется сечением). Построение сечения необходимо начинать с характерных точек, произвольные точки строят в последнюю очередь.
Задачу по определению сечения многогранника сводят к задаче пересечения прямой с плоскостью (способ граней) или к задаче пересечения прямых (способ ребер).
Пример 33
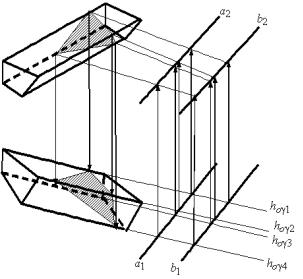
Построить пересечение четырехгранной призмы с плоскостью α (a // b) (рис. 2.33).
82
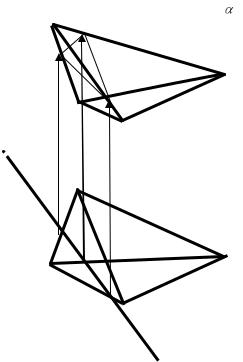
Рис. 2.33
Алгоритм решения
1. Заключим ребра призмы в горизонтально-проецирующие плоскости h0α1, h0α2,h0α3,h0α4.
2.Найдем точки пересечения h0α1, h0α2,h0α3,h0α4 с плоскостью
α(a // b).
3.Найдем точки пересечения этих прямых с ребрами на фронтальной проекции.
4.Соединим эти точки и получим сечение на фронтальной проекции призмы.
5.Построим горизонтальную проекцию сечения.
Пример 34
Определить сечение трехгранной призмы SABC горизонтально проецирующей плоскостью α, заданной следами ho (рис. 2.34).
S2 |
N2 |
|
|
М2 |
B2 |
|
|
А2 |
K2 |
С2
H0α
A1
М1
В1
S1 N1
K1 С1
83
|
|
|
|
Рис. 2.34. |
|
|
|
|
|
Алгоритм решения |
|||
|
M1 |
ho |
S1A1 ; |
|
|
|
|
N1 |
ho |
S1B1 ; |
|
|
|
|
K1 |
ho |
S1C1 ; |
|
|
|
|
Построили точки. М2, N2, K2. |
|
||||
|
Соединив их получим искомое сечение. |
|||||
|
|
|
|
Пример 35. |
||
|
Определить сечение 5-гранной призмы ABCDE , ребра ко- |
|||||
торой |
x секущей плоскостью |
h |
f (рис. 2.35). |
|||
|
|
А2 |
B2 |
Е2 |
D2 |
C2 |
|
|
|
|
52 |
|
|
|
|
12 |
|
|
|
42 |
|
|
|
|
|
|
|
|
|
|
22 |
|
|
Xα |
|
x |
|
|
32 |
|
|
|
|
|
|
|
||
|
|
|
B1≡51 |
|
|
|
|
|
|
|
|
C1≡41 |
|
|
|
A1≡11 |
|
|
D1≡31 |
|
|
|
|
|
|
|
|
|
|
|
E1≡21 |
|
|
|
84 |
|
|
|
|
|
|
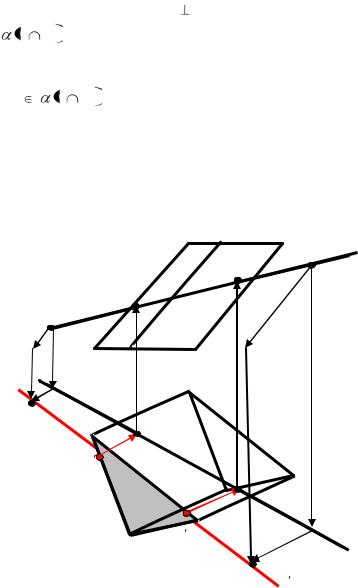
Рис. 2.35.
Алгоритм решения
|
Так как ребра призмы |
оси x , то точки их пересечения |
||
с |
h |
f |
совпадают с горизонтальными проекциями ребер |
|
( A1, B1,C1, D1, E1). |
|
|||
|
Решение сводится к нахождению недостающей проекции |
|||
точки |
h |
f . |
|
|
Пересечение многогранника прямой
Задача пересечения многогранника прямой сводится к известной схеме пересечения прямой плоскостью. Если многогранник выпуклый, то прямая пересекает многогранник в двух точках.
Пример 36
Найти точки пересечения прямой l с призмой (рис. 2.36). l2
С2
А2
x
А1
A1 |
C1 |
C1
l1 85
l1
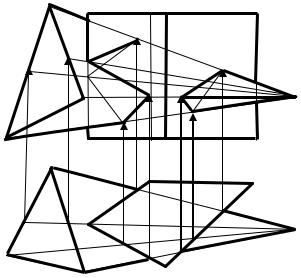
Рис. 2.36.
Алгоритм решения
Проведем косоугольное проецирование (параллельно ребрам призмы). Проекция призмы на π1 совпадает с проекцией основания призмы. Проекция прямой. l1→l11// ребрам призмы. А, B - точки пересечения прямой призмы. Определяем видимость прямой методом конкурирующих точек.
Пересечение многогранников
|
|
|
|
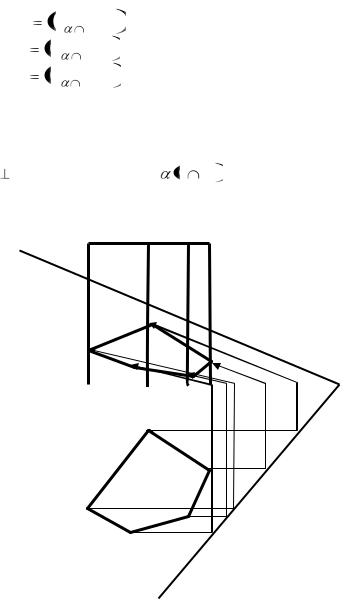
Пример 37 |
|
|
|
|
Построить линию пересечения прямой призмы и |
||||||
наклонногой пирамиды. |
|
|
|
|
|
||
|
B |
|
|
|
|
|
|
|
|
|
|
72 |
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
22 |
|
82 |
|
52 |
D2 |
||||
|
|
|
|
|
|
||
|
С2 |
|
32 |
||||
|
|
|
|
||||
|
|
12 |
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
x А2 |
|
|
|
|
|
||
|
B1 |
|
|
|
|
|
|
|
|
|
|
71 |
|
21 |
|
|
|
|
|
|
|
|
|
|
61≡81 |
|
11 |
D1 |
|||
|
А1 |
41 |
31 |
|
|
||
|
|
|
|
||||
|
|
|
|
|
|
||
|
|
С1 |
|
51 |
|
|
|
|
|
|
Рис. 2.37 |
|
|
||
|
|
|
|
|
|
||
|
|
Алгоритм решения |
|
|
|||
Точки 1, 2, 3 находим как пересечение ребер с гранью призы.
Получим сечение 1-2-3. Для построения сечения 4-5-6-7-8, необходимо провести вспомогательную горизонтально проецирующую плоскость через крайнее левое ребро призмы.
86
Находим точкипересечения этой плоскости с гранями пирамиды (т. 6 и т. 8). Точки 4, 5, 6, 7 получим на пересечении ребер пирамиды с гранями призмы. Определим видимость призмы и пирамиды.
87

Построение линии пересечения поверхностей Пример 38
Определение линии пересечения тел вращения способом секущих сфер (рис. 2.38).
41
42 |
51 |
1 |
|
|
 2
2
x |
52 |
32 |
1 |
|
|
21 |
12 |
11 |
22 |
31 1
1
Рис. 2.38
Алгоритм решения
Сначала на проекциях отметим очевидные общие точки (1, 2). Затем вводим вспомогательные плоскости частного положения –
фронтальные , , . Они пересекают фигуры по параллелям 1, 1, 1 . На фронтальной проекции вспомогательные плоскости пересекают сферу в виде концентрических окружностей
88
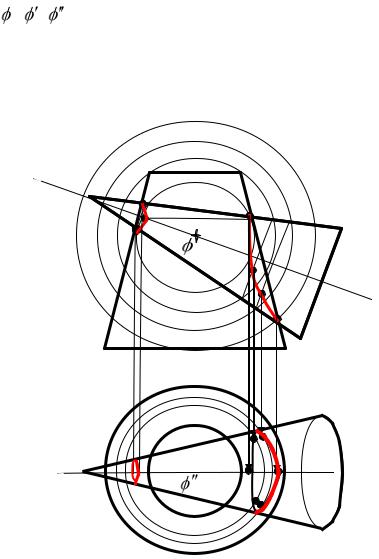
2 , 2 , 2 . На пересечении этих окружностей и восстановлен- |
||
ных из точек горизонтальной проекции цилиндра находятся точ- |
||
ки пересечения поверхностей (3, 4, 5). Полученные точки соеди- |
||
няем плавной кривой. |
|
|
Пример 39 |
||
Построить пересечение поверхности усеченного конуса с |
||
конусом способом концентрических сфер (рис. 2.40). |
||
|
|
32 |
2 |
21 |
|
|
|
|
|
|
O1 |
|
|
11 |
x |
|
|
|
|
O2 |
|
|
42 |
|
|
41 |
2 |
|
31 |
|
Рис. 2.40 |
|
Алгоритм решения |
||
89