

Лекции Соболева часть 3
.pdf58 Лекция 5 - 9
Выберем поверхность Σ, охватывающую область G. Из теоремы Остроградского – Гаусса следует, что ∫∫ (a, n0 )dσ =∫∫∫diva dxdydz .
Σ G
Воспользуемся теоремой о среднем, согласно которой существует такая точ-
ка М1, принадлежащая G, что diva |M1 |
V = ∫∫adσ ; diva(M1 ) = |
∫∫adσ |
, где V – |
|
Σ |
|
|||
|
V |
|||
|
Σ |
|
||
объем G. Пусть Σ стягивается в |
точку М, тогда М1→М, |
а diva(M1) |
||
∫∫(a,dσ)
→diva(M ) , diva(M ) = lim |
Σ |
|
. |
|
V |
||
Σ→M |
|
||
Поскольку правая часть выражения не зависит от системы координат (инвариантна), то инвариантно и данное определение дивергенции.
7.8.1. Физический смысл дивергенции |
|
||||||
|
|
∫∫(a, dσ) |
|
|
|
||
Поскольку величина |
Σ |
|
имеет смысл средней плотности потока в |
||||
V |
|
||||||
|
|
|
|
|
∫∫a, dσ |
|
|
пространственной области G, то |
lim |
|
= diva есть плотность потока в |
||||
|
Σ |
||||||
|
V |
||||||
точке М. |
|
|
Σ→M |
|
|
||
|
|
|
|
|
|
|
|
Точки поля, |
в |
которых |
|
дивергенция положительна, т.е. |
|||
diva(M ) > 0 Π > 0 , |
называют источниками векторного поля, а точки, в |
||||||
которых дивергенция отрицательна, |
diva(M ) < 0 Π < 0 - стоками вектор- |
||||||
ного поля. |
|
|
|
|
|
|
|
СВекторные линии векторного поля начинаются в точках поля с положительной дивергенцией, а заканчиваются в точках с отрицательной дивергенцией.
О Величину div a(M ) называют мощностью источника или стока.
Теория поля |
59 |
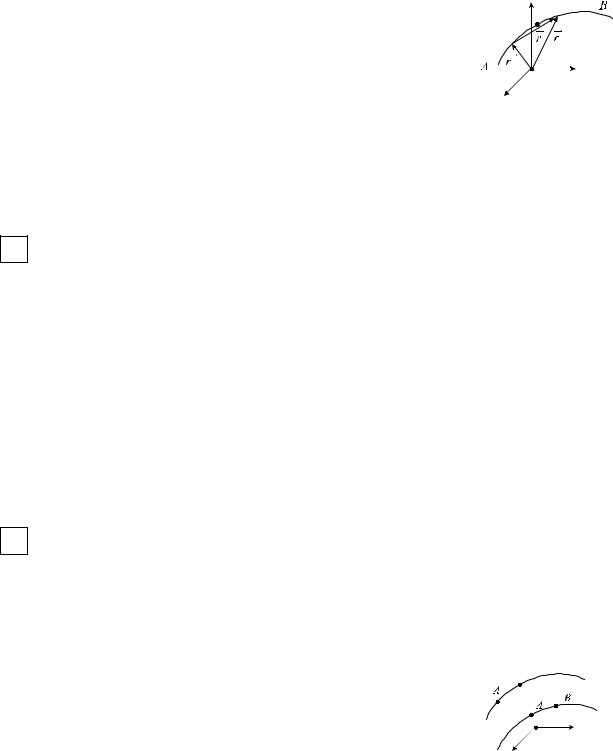
8. Линейный интеграл в векторном поле
8.1. Понятие линейного интеграла
Рассмотрим кусочно-гладкую кривую L и дугу |
|
|
Z |
Ai |
|||
AB (обозначение AB ) |
и |
векторное |
поле |
Ai−1 ∆ i−1 |
|
||
a = (ax ,ay ,az ) , непрерывное |
на |
L. Разобьем |
дугу |
i |
|||
|
|
|
|
||||
|
i−1 |
|
|||||
AB произвольным образом точками A0, A1, …An на |
|
|
|||||
|
|
|
Y |
||||
n частей. Обозначим ∆ri - вектор, |
стягивающий кон- |
X |
|
||||
цы дуги Ai-1Ai . Выберем точку |
Pi Ai-1Ai . Най- |
|
|
|
|
||
дём скалярное произведение (a(Pi ),∆ri ) и просуммируем по всем участкам
дуг S |
|
|
n |
(a(P),∆r ) . Вычислим предел lim S |
|
|
lim |
n |
(a(P ), ∆r ) . |
|||||||
|
= |
∑ |
|
= |
∑ |
|||||||||||
|
n |
|
i |
i |
n→∞ |
n |
|
max( |
|
∆r |
|
→0) |
i |
i |
||
|
|
|
|
|
||||||||||||
|
|
|
i=1 |
|
|
|
|
|
|
|
i |
|
|
i=1 |
|
|
ОЕсли этот предел существует и не зависит от способа разбиения дуги
AB на отдельные участки и от выбора точки Pi, то он называется ли-
нейным интегралом вектора a по дуге AB в направлении от А до В.
Обозначение: ∫ (a,dr ) . Координатная форма записи:
AB
∫ (a,dr ) = ∫ axdx + aydy + az dz =
AB AB
=∫ ax (x, y, z)dx + ay (x, y, z)dy + az (x, y, z)dz ,
AB
|
|
|
|
|
|
n |
∫ |
(a,dr ) = max |
|
lim∆r |
|
→0 |
∑(a(Pi ), ∆ri ) . |
|
|
|||||
AB |
|
|
|
|
i |
i=1 |
|
|
|
|
|
|
!Линейный интеграл иногда называют криволинейным интегралом второго рода.
8.2. Свойства линейного интеграла
1.Свойство линейности:
∫ ((λa + µb), dr ) = λ ∫ (a,dr ) + µ ∫ (b,dr ) .
AB |
AB |
AB |
2.Свойство аддитивности:
∫ (a,dr ) = ∫ (a,dr ) + ∫ (a, dr ) .
AB AC CB
C Z


C 
Y
X

60 |
Лекция 5 - 9 |
3.При изменении направления интегрирования линейный интеграл меняет
знак: ∫ (a,dr ) = − ∫ (a,dr ) .
AB |
BA |
Свойства 1-3 доказываются из определения.
!Определение криволинейного интеграла остается справедливым, если начальная и конечная точка совпадают.
О Криволинейный интеграл по замкнутому контуру |
|
|
называется циркуляцией векторного поля по |
|
|
замкнутому контуру: C = ∫ |
(a, dr ) . |
+ |
L |
|
|
Положительным направлением обхода считается то, при котором область, ограниченная контуром, остается слева.
8.3. Вычисление линейного интеграла
Пусть AB L и кривая L задана параметрическими уравнениями:
|
|
x = x(t) |
|
|
|
|
|||
|
|
|
= y(t) , |
|
|
|
|||
|
|
L : y |
|
|
|
||||
|
|
|
= z(t) |
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
||
|
|
x = x(t |
) |
x |
= x(t ) |
||||
при этом при t = t0 |
|
0 |
|
0 |
|
1 |
1 |
|
|
имеем точку A: y0 |
= y(t0 ) , при t = t1 |
B : y1 |
= y(t1 ) , |
||||||
|
|
z |
0 |
= z(t |
0 |
) |
z |
= z(t |
) |
|
|
|
|
|
1 |
1 |
|
||
тогда |
|
|
|
|
|
|
|
|
|
∫ (a,dr ) = ∫ ax (x, y, z)dx + ay (x, y, z)dy + az (x, y, z)dz = |
|
|
|||||||
AB |
AB |
|
|
|
|
|
|
|
|
t1 |
|
i |
|
|
i |
|
i |
|
|
= ∫{ax (x(t), y(t), z(t)) x(t) +ay (x(t), y(t), z(t)) y(t) + az (x(t), y(t), z(t)) z(t)}dt ,
t0
ii i
где точки над символами x, y, z означают дифференцирование по переменной t.

Теория поля |
|
|
|
|
|
|
|
|
|
|
|
61 |
||
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Дано: |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x = R cos t |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
=0), B(t1 =2π ). |
|
|
|
|
a = zi + xj + yk , L: y = R sin t , A(t0 |
|
|
||||||||||
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z = 2π |
|
|
|
|
|
|
||
|
|
Вычислить линейный интеграл по AB . |
|
|
||||||||||
|
|
Решение: |
|
|
|
|
|
|
|
|
|
|||
|
|
|
∫(a, dr ) = ∫zdx + xdy + ydz = |
2∫π |
{ |
t |
(−R sin t) + R cos tR cos t + |
R |
R sin t}dt = |
|||||
|
|
|
2π |
2π |
||||||||||
|
|
AB |
|
AB |
|
|
0 |
|
|
|
||||
|
|
|
|
R |
2π |
2 |
|
|
|
|
|
|
|
|
|
|
= |
|
|
∫sin tdt = πR +R. |
|
|
|
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
|
|
|
|
|||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
8.4. Физический смысл линейного интеграла
Рассмотрим в качестве поля a силу F , приложенную к материальной точке Р и меняющуюся по величине и направлению при изменении местоположения точки Р. A = (F,dr ) - работа по перемещению материальной точки
по участку dr , тогда ∫ (F,dr ) = A - работа силы F по перемещению мате-
AB
риальной точки по дуге АВ.
8.5. Ротор (вихрь) векторного поля
Пусть вектор-функция a = a(P) = (ax ,ay ,az ) является непрерывно дифференцируемой в каждой точке области определения.
ОРотором векторного поля (вектора) a называется вектор, обозначаемый символом rot a , равный
|
∂a |
|
|
∂ay |
|
|
∂a |
|
|
∂a |
|
∂ay |
|
∂a |
|
||
rota = i |
|
z |
− |
|
|
+ |
j |
|
z |
− |
|
x |
+ k |
|
− |
|
x . |
|
∂z |
|
|
∂x |
|
||||||||||||
|
∂y |
|
|
|
|
∂x |
|
∂z |
|
|
∂y |
||||||
Это выражение удобно записать в виде символического определителя
62 |
|
|
|
|
|
Лекция 5 - 9 |
|
i |
|
j |
k |
|
|
rot a = |
∂ |
|
∂ |
|
∂ |
, |
∂x |
|
∂y |
∂z |
|||
|
|
|
||||
ax ay az
который вычисляется разложением по первой строке (базисным векторам i , j,k ); произведение частных производных на компоненты вектора понима-
ется как дифференцирование последних, т.е. ∂∂z ax = ∂∂azx и т.п. С использова-
нием оператора набла rot a = , a или rot a = ×a .
!Если в некоторой точке поля rot a = 0 , то поле в этой точке называется безвихревым.
Пример:
a = (x + z)i + ( y + z) j + (x2 + z)k .
|
|
i |
|
j |
|
k |
|
|
|
|
|
|||
rota = |
|
∂ |
|
|
∂ |
|
|
∂ |
|
= i ( |
∂ |
(x2 + z) − |
∂ |
( y + z)) − |
|
∂x |
|
∂y |
|
∂z |
∂y |
∂z |
|||||||
|
|
|
|
|
|
|
||||||||
|
x + z |
y + z |
x2 + z |
|
|
|
|
|
||||||
−j( ∂∂x (x2 + z) − ∂∂z (x + z)) + k ( ∂∂x ( y + z) − ∂∂y (x + z)) =
=− i − j(2x −1) + 0k = { −1, 1−2x, 0 }.
8.5.1.Свойства ротора (вихря)
1.Линейность: rot(λa + µb) = λ rota + µ rotb , где λ и µ - некоторые постоянные. Иначе, ,(λa + µb) = λ ,a + µ ,b .
2.Пусть u = u(x, y, z) - скалярное поле, тогда rot(u a) =
=[gradu, a]+u rot a .
В векторных обозначениях: [ ,(ua)] =[ u,a] +u[ , a]. Доказательство:
|
|
i |
|
j |
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
∂ |
|
∂ |
|
∂ |
|
|
∂ |
|
∂ |
|
|
∂ |
|
∂ |
|
|
||||
[ ,(ua)] = |
|
|
|
|
|
|
|
|
|
= |
i |
|
(uaz ) − |
|
(uay ) |
− |
j |
|
(uaz ) − |
|
(uax ) |
+ |
|
∂x |
|
∂y |
|
∂z |
∂y |
∂z |
∂x |
∂z |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
uax |
uay |
uaz |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Теория поля |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
63 |
||||
|
|
∂ |
|
|
|
∂ |
|
|
= u { i |
|
∂ |
az − |
|
|
∂ |
ay ) − j( |
∂ |
az − |
∂ |
ax ) +k ( |
|
|
∂ |
|
|
|
|
∂ |
|
|
|||||||||||||||||||
|
+k |
|
(uay ) − |
|
(uax ) |
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ay |
− |
|
ax ) }+ |
||||||||||||||||||||||||
∂x |
∂y |
∂y |
|
∂z |
∂x |
∂z |
|
∂x |
∂y |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
+ i ( |
∂u az − |
∂u ay ) |
+ j(∂u az − |
∂u ax ) +k ( |
∂u ay − |
∂u ax ) = u rot(a) +[grad u, a]. |
||||||||||||||||||||||||||||||||||||||||||
|
|
∂y |
|
∂z |
|
|
∂x |
∂z |
|
|
|
|
|
|
|
∂x |
∂y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Пример: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
a = const , |
rot( |
|
r |
|
a) = [grad |
|
r |
|
, a] + |
|
r |
|
rota = [grad |
|
r |
|
, a] = |
|
|
r |
|
|
×a = |
1 |
|
r ×a . |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
r |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8.6. Теорема Стокса
(устанавливает связь между циркуляцией и ротором)
Циркуляция непрерывно дифференцируемого векторного поля a = axi + ay j + az k по произвольному кусочно-гладкому контуру L вычисляется по формуле
|
|
|
|
|
|
|
|
∂a |
|
∂ay |
||
∫axdx + aydy + az dz = ∫∫ |
∂yz − |
|
cosα + |
|||||||||
∂z |
||||||||||||
L |
|
|
|
|
Σ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∂a |
|
∂a |
|
∂ay |
|
∂a |
|
|
|
||
+ |
|
x − |
|
z cos β |
+ |
|
|
− |
|
x cosγ dσ . |
||
|
|
|
|
|
||||||||
|
∂z |
∂x |
|
∂x |
|
∂y |
|
|||||
При этом выбор стороны поверхности Σ и направление обхода контура L согласованы (по правилу винта).
Доказательство:
Для доказательства сгруппируем слагаемые в пра- |
|
|
Z |
t1 |
|
|
||||||||||||
|
|
t2 |
0 |
|||||||||||||||
вой части с одинаковыми координатами вектора a : |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|||||||||||||
|
|
|
|
∂ax |
|
∂ax |
|
|
|
|
|
|
y1(x) |
y2(x) |
||||
∫∫(rota, dσ) = ∫∫ |
|
cos β − |
|
cosγ dσ + |
|
|
|
|
|
Y |
||||||||
∂z |
∂y |
|
|
X |
|
|
|
|||||||||||
Σ |
|
|
|
Σ |
|
|
|
|
|
|
|
|
xy |
|||||
|
∫∫Σ |
∂ay |
|
∂ay |
|
|
|
∫∫Σ |
∂a |
|
∂a |
|
|
|
|
|
||
|
|
∂x |
|
∂z |
|
|
|
|
∂y |
∂x |
|
|
|
|
||||
+ |
|
|
|
cosγ − |
|
cosα dσ |
++ |
|
|
|
z cosα − |
|
z cos β dσ . |
|
|
|
||
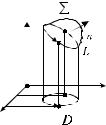
Рассмотрим первый из интегралов:
64 Лекция 5 - 9
I |
= |
∫∫Σ |
( |
∂ax cos β − |
∂ax cosγ )dσ = |
∫∫Σ |
( |
∂ax cos β |
− |
∂ax )cosγdσ . |
||
1 |
|
|
∂z |
|
∂y |
|
|
∂z cosγ |
|
∂y |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Пусть |
поверхность |
Σ |
однозначно |
проектируется на координатную |
||||||||
плоскость Oxy , т.е. любая прямая, параллельная оси Oz , пересекает ее не бо-
лее чем в одной точке; тогда Σ: z = z(x, y) , | n |= |
|
∂z 2 |
|
∂z 2 |
|
|
|
+ |
|
+1 ; |
|
|
|
∂x |
|
∂y |
|
|
|
|
|
∂z |
|
|
∂z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
, |
|
|
, −1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
∂x |
|
∂y |
|
|
cos β = − |
∂z , |
|
|
|
|
|
|
|||||||||
n |
= |
|
|
|
|
|
|
|
, |
так как угол между ортом n |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
0 |
|
|
∂z |
2 |
|
|
|
∂z |
|
2 |
|
|
|
cosγ |
|
∂y |
|
|
|
|
|
0 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
+1 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
∂y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
∂x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Oz |
(n ,Oz) < π |
; |
cosγdσ = dxdy . |
Переходя |
к |
двойному интегралу |
||||||||||||||||||
|
0 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
∫∫→ ∫∫ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
, получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Σ |
|
Dxy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
D∫∫ |
∂a (x, y, z) ∂z ∂a (x, y, z) |
dxdy . |
||||||||||
|
|
|
|
|
|
|
|
|
|
= |
|
− |
|
x |
∂z |
|
∂y |
− |
x |
∂y |
|
|||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xy
и осью
по Dxy:
По формуле дифференцирования сложной функции, записывая полную производную сложной функции, имеем:
|
|
|
∂ax (x, y, z(x, y)) = |
∂ax (x, y, z) |
+ ∂ax (x, y, z) |
∂z , |
|||||
|
|
|
|
|
∂y |
∂y |
|
|
∂z |
∂y |
|
|
|
|
∂a |
|
|
|
b |
y2 ( x) ∂a |
x (x, y, z(x, y))dy = |
||
∫∫ − |
|
x |
(x, y, z(x, y))dxdy = −∫dx |
∫ |
|
||||||
D |
xy |
|
∂y |
|
|
a |
y ( x) |
∂y |
|
||
|
|
|
|
|
|
|
1 |
|
|
|
|
= −∫b ax (x, y2 (x)), z(x, y2 (x))dx + ∫b |
ax (x, y1 (x)), z(x, y1 (x))dx == ∫ax (x, y, z)dx . |
||||||||||
a |
|
|
|
|
a |
|
|
|
|
|
L |
Докажем последнее преобразование. |
|
|
|
|
|
||||||
|
|
|
∫ax (x, y, z)dx = ∫ax (x, y, z)dx + ∫ax (x, y, z)dx =… |
||||||||
|
|
|
L |
|
L1 |
|
|
L2 |
|
|
|
|
|
|
|
|
{пусть L задана параметрически}… |
|
|||||
= |
t2 ax (x(t), y(t), z(t)) x(t)t dt + |
t1 ax (x(t), y(t), z(t)) x(t)t dt = |
|||||||||
|
|
∫t1 |
|
|
|
|
∫t2 |
|
|
|
|
…{t = x; x(t)t =1}…=
= ∫ab ax (x, y1 (x), z( y1 (x))) dx + ∫ba ax (x, y2 (x), z( y2 (x))) dx .
Остальные два слагаемых рассматриваются аналогично. Почленное суммирование этих выражений приводит к формуле Стокса.
Теория поля |
65 |
1). Используя обозначение ротора, формулу Стокса можно переписать в ! векторном виде: ∫(a,dr ) = ∫∫(rota, dσ) . Поток вектора rota через
L Σ
ориентированную поверхность Σ равен циркуляции поля a по контуру L, ориентированному в соответствии с ориентацией Σ.
2). Для того чтобы криволинейный интеграл по любому кусочногладкому контуру равнялся нулю, необходимо и достаточно, чтобы выполнялись условия Стокса: ∂∂ayz = ∂∂azy ; ∂∂azx = ∂∂axz ; ∂∂axy = ∂∂ayx .
Пример:
Вычислить циркуляцию вектора |
Z |
a = yi + x2 j − zk по контуру L: |
|
x |
2 |
+ y |
2 |
= 4; |
|
x = 2cost; |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
, |
|
|
= 2sint; . |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
z = 3; |
|
y |
|
|
|
|
|
|
|
|
|
|
|
Y |
|||||||
|
|
|
|
|
|
|
|
= 3. |
|
|
|
|
|
|
|
|
|
|
|
|
xy |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X |
|||
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Решение. Вычислим циркуляцию век- |
|
|
|
|
|
|
|||||||||||||||||||
тора непосредственно: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
C = ∫ ydx + x2 dy − zdz = ∫ dt{2sin t(−sin t)2 + 4cos2 t 2cos t −3 0}= |
|||||||||||||||||||||||||
|
|
|
|
L |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
= - 4 |
2∫πsin 2 tdt +8 |
2∫πcos2 td sin t = −4 |
2∫π |
1 − cos 2t |
dt +8 |
2∫π(1 −sin 2 t)d sin t = |
|||||||||||||||||||
|
|||||||||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
0 |
|
2 |
|
|
|
|
|
0 |
= − |
1 |
4t | |
2π |
+ sin 2t | |
2π |
+ 8sin t | |
0 |
2π |
− 8 |
sin 3 t |
| |
0 |
2π |
= −4π ; |
|||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
2 |
|
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
3 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
C = ∫∫(rota,dσ) = ∫∫(rota, n0 )dσ = ∫∫(rota,(0,0,1))dσ = ∫∫(rota)z dσ = |
|||||||||||||||||||||||||
|
|
|
|
Σ |
|
|
|
|
|
|
Σ |
|
|
|
|
|
Σ |
|
|
|
|
|
|
Σ |
|
= ∫∫(−1+ 2x)dσ =…
Σ
Вычислим циркуляцию вектора по теореме Стокса: i j k
{rota = |
|
∂ |
|
∂ |
|
|
∂ |
= 0i +0 j +(−1+ 2x)k } = ∫∫(2x −1)dxdy = |
|||||||||
|
∂x |
|
∂y |
|
|
∂z |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Dxy |
|||
|
|
|
|
y |
|
x2 |
|
−z |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
= |
2∫πdϕ∫2 |
(2ρ cosϕ −1)ρdρ = ∫2 |
ρdρ |
2∫π(2ρ cosϕ −1)dϕ = |
|||||||||||||
|
0 |
0 |
|
|
|
|
|
|
|
0 |
|
0 |
|
|
|
|
|
= ∫2 |
ρ(2ρ sinϕ |
|
02π − 2π )d ρ = −2π |
ρ2 |
|
|
2 |
= −4π . |
|||||||||
|
|
||||||||||||||||
|
|
|
|||||||||||||||
|
|
|
|
||||||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||

66 Лекция 5 - 9
8.7. Инвариантное определение ротора
|
|
i |
|
j |
k |
|
|
|
Ранее было дано определение ротора rota = |
|
∂ |
|
∂ |
|
∂ |
|
, справедливое |
∂x |
|
∂y |
∂z |
|||||
|
|
|
|
|
||||
|
|
ax |
|
ay |
az |
|
|
|
лишь в декартовой системе координат.
Теорема Стокса позволяет дать инвариантное (независящее от системы координат) определение ротора векторного поля.
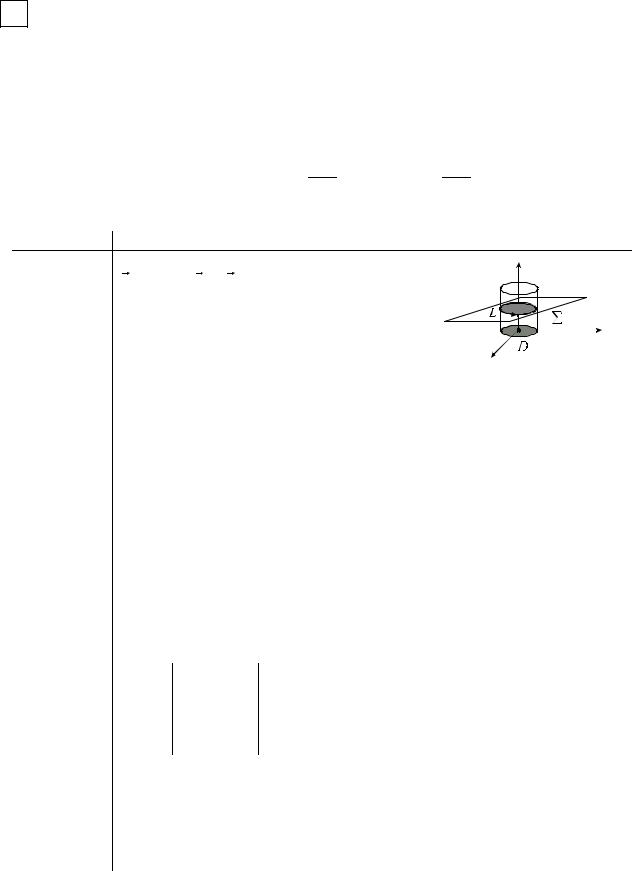
Пусть a = a(P) - векторное поле, удовлетво- |
a |
ряющее теореме Стокса; n0 - некоторое фиксиро- |
no |
ванное направление, проходящее через точку М; |
M |
|
|
D - плоская область величины SD , охватывающая |
|
точку М, а L - граница области D. Направления обхода контура L и ориентация области D согласованы в соответствии с теоремой Стокса:
∫(a,dr ) = ∫∫(rota, dσ) или ∫∫(rota, dσ) = ∫∫Πpn0 rotadσ .
L |
Σ |
Σ |
D |
По теореме о среднем существует точка М1: Πpn0 rota(M1) SD = ∫(a, dr ) .
|
|
|
|
|
|
|
|
L |
|
|
|
Πpn rota(M1) = |
∫(a, dr ) |
|
|
|
|
||||
Тогда |
|
L |
|
. Будем стягивать контур L в точку М, тогда |
||||||
|
|
|
||||||||
|
0 |
|
SD |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
точка M1 → M и Πpn |
rota(M ) = lim |
∫(a, dr ) |
. Поскольку |
∫(a,dr ) |
- средняя |
|||||
L |
L |
|||||||||
SD |
SD |
|||||||||
|
0 |
|
|
L→M |
|
|
||||
|
|
|
|
|
|
|
||||
поверхностная плотность циркуляции поля по площади SD, то проекция |
||||||||||
rot(a) |
на направление n0 |
не зависит от выбора систем координат и равна по- |
||||||||
верхностной плотности циркуляции вектора a по контуру L, который стягивает площадку, перпендикулярную этому направлению.
8.8. Физический смысл ротора
Пусть вектор a =V (P) задает поле линейных скоростей жидкости, дви-
жущейся вокруг оси Oz, и в точке Р угловая скорость вращения ω =ωk . Тогда
i j k
V (P) =ω × r = 0 0 ω = −ωyi + ωxj, x y z

Теория поля |
|
|
|
|
|
|
|
67 |
|
вычислим |
|
|
|
|
|
|
|
|
|
|
|
i |
|
j |
k |
|
|
||
|
|
|
|
|
|||||
rotV (P) = |
|
∂ |
|
|
∂ |
|
∂ |
|
= 0 i + 0 j + (ω +ω)k = 2ωk . |
|
∂x |
|
∂y |
∂z |
|||||
|
|
|
|
|
|||||
|
−ωy |
ωx |
0 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
Итак, ротор поля линейных скоростей равен удвоенной угловой скоро-
сти вращения ω бесконечно малого объема, окружающего точку Р, в предположении, что в рассматриваемый момент времени этот объем жидкости внезапно отвердел. Это объясняет название «вихрь» вектора, так как в обычном представлении вихрь связан с интенсивностью вращения движущихся частиц жидкости (турбулентность, водоворот).
8.9. Формула Грина
Пусть в односвязной плоской области D, имеющей границу L, задано
непрерывно |
дифференцируемое |
|
векторное поле |
||||
∫(axdx + aydy) = ∫∫( |
∂ay |
− |
∂a |
x ) dxdy |
, |
при этом контур |
|
|
|
||||||
L |
D |
∂x |
|
∂y |
|
|
|
область D оставалась слева. Доказательство:
Рассмотрим формулу Стокса для данного случая:
∫(a,dr ) = ∫∫(rota, dσ) .
L |
Σ |
a = axi + ay j , тогда
обходится так, чтобы
L1 L2
D
L3
L = L1  L2
L2  L3
L3
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i |
|
j |
k |
|
|
|
Σ → D : |
|
cos(γ ) |
|
=1, |
dxdy = |
|
cos(γ ) |
|
dσ ; rota = |
|
∂ |
|
∂ |
|
∂ |
|
; откуда следует |
|||
|
|
|
|
|||||||||||||||||
|
|
|
|
∂x |
|
∂y |
∂z |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ax |
|
ay |
0 |
|
|
|
∫∫(rota)z dxdy = ∫∫( |
∂ay |
− |
∂a |
x )dxdy . |
|
|
|
|
|
|
|
|||||||||
∂x |
|
|
|
|
|
|
|
|
||||||||||||
D |
|
D |
|
∂y |
|
|
|
|
|
|
|
|||||||||
Область D может быть и неодносвязной. В этом случае под линейным интегралом понимается сумма по всем компонентам границы D.
!В некоторых случаях формула Грина позволяет упростить вычисление циркуляции векторного поля.