

15.4 Синтез контура скорости, настроенного на симметричный оптимум (со)
Если по техническим требованиям необходимо реализовать систему регулирования скорости с большим диапазоном регулирования скорости, то контур скорости настраивают на симметричный оптимум (СО). При этом контур тока, как обычно, настраивается на модульный оптимум. Расчетная структурная схема контура скорости приведена на рис.15.5.
Разомкнутый контур скорости настроенный на СО должен иметь следующую передаточную функцию
![]() ,
(15.21)
,
(15.21)
где: асс=416 – коэффициент настройки контура скорости на СО;
асс=8 - стандартный коэффициент настройки.
Для облегчения процесса синтеза контура скорости следует использовать упрощенную передаточную функцию свернутого контура тока вида
![]() .
.
Обычно ТС=2ТТ и поэтому передаточная функция регулятора скорости, обеспечивающего настройку на СО, находится из соотношения W(р)ркс =W(р)ркс со, т.е.
![]() .
(15.22)
.
(15.22)
Следовательно, для настройки контура скорости на СО регулятор скорости должен иметь передаточную функцию пропорционально – интегрального звена
![]() ,
(15.23)
,
(15.23)
где:
![]() – постоянная времени интегрирования
регулятора скорости;
– постоянная времени интегрирования
регулятора скорости;
![]() - коэффициент
усиления регулятора скорости.
- коэффициент
усиления регулятора скорости.
Схема реализации ПИ-регулятора приведена на рис.15.4.
Замкнутый контур скорости имеет следующие передаточные функции по задающему воздействию
 (15.24)
(15.24)
где:
![]() – характеристический полином третьей
степени передаточной функции контура,
настроенного на СО
– характеристический полином третьей
степени передаточной функции контура,
настроенного на СО
![]() ,
(15.25)
,
(15.25)
![]() .
(15.26)
.
(15.26)
П ередаточные
фун-кции (15.25), (15.26) от-личаются только
масш-табными коэффициента-ми. Установившиеся
зна-чения выходных коорди-нат
ередаточные
фун-кции (15.25), (15.26) от-личаются только
масш-табными коэффициента-ми. Установившиеся
зна-чения выходных коорди-нат
![]() ,
,![]() я,
я,![]() находятся из произведений передаточных
функций (15.24), (15.25), (15.26) при р
находятся из произведений передаточных
функций (15.24), (15.25), (15.26) при р![]() 0.
0.
П
Рис.15.8.
Переходные процессы в контуре скорости,
настроенном на СО при отработке сигнала
задания uЗС 1
– малое некомпенсируемое апериодическое
звено; 2
– малое некомпенсируемое высокочастотное
колебательное звено![]() uзс,
uзс,
![]() ,Iяуст=0,
Муст=0.
Графики переходных процессов отработки
задающего напряжения uзс
при асс=8
,Iяуст=0,
Муст=0.
Графики переходных процессов отработки
задающего напряжения uзс
при асс=8![]() приведены на рис.15.8. Зависимости
приведены на рис.15.8. Зависимости![]() соответствуют следующие показатели
качества:tпп=16,5Тс,
tн=3,1Тс,
=43%,
nк=2.
соответствуют следующие показатели
качества:tпп=16,5Тс,
tн=3,1Тс,
=43%,
nк=2.
Передаточная функция сигнала ошибки uс при отработке сигнала задания имеет вид
![]() .
(15.27)
.
(15.27)
Числитель этой
передаточной функции содержит сомножителем
оператор р
во второй степени. Следовательно, контур
скорости, настроенный на СО, имеет
астатизм второго порядка относительно
сигнала задания скорости. При отработке
ступенчатого сигнала задания скорости
uзс
установившаяся ошибка. uуст=0,
т.е. в установившемся режиме u![]() .
Поэтому коэффициент обратной связи по
скорости рассчитывается из соотношения
(15.15). Передаточные функции контура
скорости по возмущению от момента
сопротивления при настройке на СО имеют
следующие выражения
.
Поэтому коэффициент обратной связи по
скорости рассчитывается из соотношения
(15.15). Передаточные функции контура
скорости по возмущению от момента
сопротивления при настройке на СО имеют
следующие выражения
![]() (15.28)
(15.28)
![]() (15.29)
(15.29)
![]() (15.30)
(15.30)
П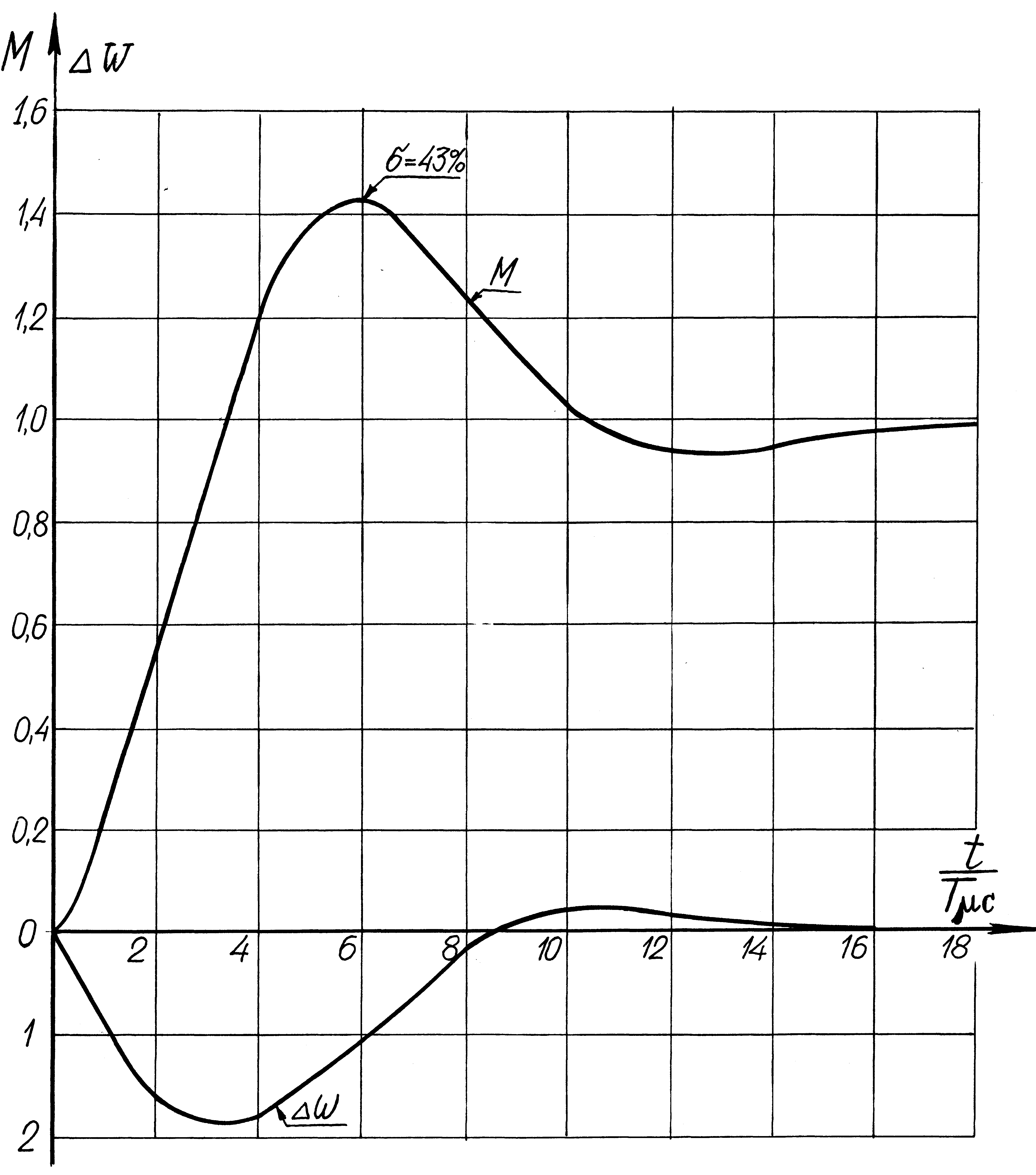 ереходные
процессы при компенсации ступенчатого
возму-щения поМс
приведены на рис.15.9. Из передаточной
функции (15.32) следует, что контур ско-рости,
настроенный на СО, имеет астатизм первого
порядка по входу Мс,
и установившееся
отклонение скорости от воздействия
сту-пенчатого момента сопротивления
при р0
ереходные
процессы при компенсации ступенчатого
возму-щения поМс
приведены на рис.15.9. Из передаточной
функции (15.32) следует, что контур ско-рости,
настроенный на СО, имеет астатизм первого
порядка по входу Мс,
и установившееся
отклонение скорости от воздействия
сту-пенчатого момента сопротивления
при р0
![]() .
.
Рис.15.9.
Переходные процессы в контуре скорости,
настроенном на СО при отработке
возмущения МС![]() .
Уравнение механической характеристики
при настройке на СО
.
Уравнение механической характеристики
при настройке на СО![]() (15.31)
(15.31)
Передаточная
функция (15.30) совпадает по виду с
передаточной функцией
![]() .
Поэтому динамические показатели качества
переходного процесса М(t)
при отработке возмущения такие же, как
у переходного процесса
.
Поэтому динамические показатели качества
переходного процесса М(t)
при отработке возмущения такие же, как
у переходного процесса
![]() .
.
Для улучшения качества переходных процессов отработки сигналов задания скорости рекомендуется на задающем входе включать компенсирующее апериодическое звено (фильтр) с передаточной функцией
![]() .
(15.32)
.
(15.32)
Тогда передаточные функции контура скорости по сигналу задания будут иметь вид
![]() (15.33)
(15.33)
![]() (15.34)
(15.34)
![]()
![]() (15.35)
(15.35)
Г Рис.15.10.
Переходные процессы в контуре скорости,
настроенном на СО
![]() имеет следующие показатели качества:tпп=13,3Тс,
tн=7,6Тс,
=8%,
nк=1.
имеет следующие показатели качества:tпп=13,3Тс,
tн=7,6Тс,
=8%,
nк=1.
Показатели качества переходных процессов от воздействия возмущения Мс остаются прежними, так как компенсирующий фильтр, установленный на входе управления, находится вне контура регулирования скорости. Реально в контуре скорости контур тока является малым высокочастотным звеном второго порядка. Поэтому при настройке контура скорости на СО, переходный процесс имеет показатели качества несколько хуже, чем в идеальном случае, как показано на рис.15.8. Однако с этим приходится соглашаться, чтобы достигнуть требуемых больших диапазонов регулирования скорости до D=100001 и более.