

15.5. Ограничение тока якоря в двухконтурных системах регулирования скорости
По техническим условиям ток якоря не должен превышать допустимого значения Iдоп, которое для общепромышленных серий двигателей составляет (2÷4)Iян. Это ограничение определяется условиями коммутации тока на коллекторе.
П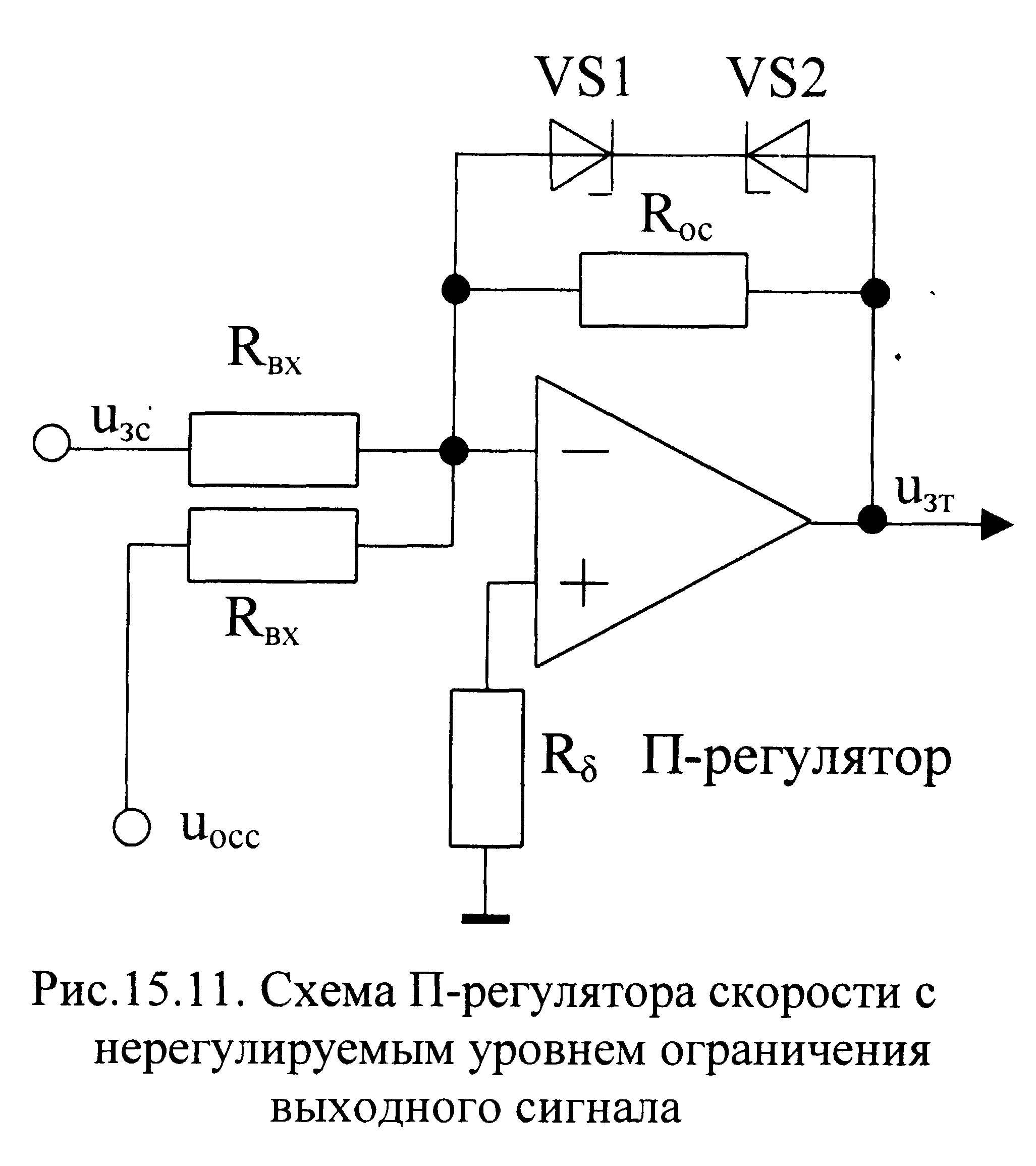 ри
отработке больших сигналов задания
скорости, например при пуске, ток якоря
двигателя может многократно превышать
допустимое значение. Чтобы этого не
происходило, принимают специальные
меры по его ограничению. Для этого в
системах электропривода с подчиненным
регулированием координат используют
ограничения сигнала задания токаuзт.
Это задача решается путем ограничения
сигнала на выходе регулятора скорости.
ри
отработке больших сигналов задания
скорости, например при пуске, ток якоря
двигателя может многократно превышать
допустимое значение. Чтобы этого не
происходило, принимают специальные
меры по его ограничению. Для этого в
системах электропривода с подчиненным
регулированием координат используют
ограничения сигнала задания токаuзт.
Это задача решается путем ограничения
сигнала на выходе регулятора скорости.
Простейший схемный ва-риант ограничения uзт с исполь-зованием стабилитронов приве-ден на рис.15.11. Работа схема протекает следующим образом. Когда напряжение uзТ превысит напряжение пробоя одного из стабилитронов uст, внутреннее сопротивление стабилитрона резко уменьшается и резистор Rос шунтируется. Поэтому в режиме ограничения uзТ коэф-фициент усилений регулятора скорости близок к нулю. Пе-реход в режим ограничения то-ка соответствует размыканию контура скорости. Регулировочные характеристика регулятора скорости на этом этапе, как показано на рис.15.12, горизонтальна.
![]() .
(15.37)
.
(15.37)
Если во время
переходного процесса ток якоря не
превышает допустимого значения
![]() и узлы тока ограничения не действуют,
то система регулирования работает в
линейной зоне и ее динамика описывается
ранее приведенными передаточными
функциями. Ширина линейной зоны по
сигналу задания скорости
и узлы тока ограничения не действуют,
то система регулирования работает в
линейной зоне и ее динамика описывается
ранее приведенными передаточными
функциями. Ширина линейной зоны по
сигналу задания скорости
![]() ,
,
г де:uзс.гр
– граничное значение сигнала задания,
при котором максимум тока якоря достигает
допустимого значения Iдоп.
Величина uзс.гр
рассчитывается при моделирования или
находится из универсального графика
переходного процесса
де:uзс.гр
– граничное значение сигнала задания,
при котором максимум тока якоря достигает
допустимого значения Iдоп.
Величина uзс.гр
рассчитывается при моделирования или
находится из универсального графика
переходного процесса
![]() .
.
Е Рис.15.13.
Переходный процесс пуска и торможения
в системе регулирования скорости с
ограничением uЗТ
при Мс=Мн,
uзс>>uгр
настройки МО
Процесс отработки
больших сигналов задания скорости
протекает с ограничением uзс
в три этапа. На первом этапе ток якоря
нарастает от нуля до Iя.доп.
На втором этапе, когда тока якоря
постоянен Iя=Iдоп,
регулятор скорости находится в режиме
ограничения выходного сигнала. На
третьем этапе скорость близка к заданному
значению, и регулятор скорости выходит
из режима ограничения; тогда ток якоря
начинает спадать и уменьшается до
величины
![]() .
Ускорение разгона на втором этапе пуска
.
Ускорение разгона на втором этапе пуска![]() .
Отрицательное ускорение на втором этапе
торможения
.
Отрицательное ускорение на втором этапе
торможения![]() .
Исходя из этого время пуска будет
примерно в 3 раза больше времени торможения
до остановки.
.
Исходя из этого время пуска будет
примерно в 3 раза больше времени торможения
до остановки.
15.6. Формирование переходных процессов отработки больших сигналов задания скорости
Часто
по условиям технологии работы механизмов
необходимо формировать переходный
процесс таким образом, чтобы на участках
пуска и торможения при отработке больших
сигналов uзс
ускорение
![]() было бы одинаковым и не зависело от
величины и характера момента сопротивления.
В этих случаях управление электроприводом
осуществляется от включенного на входе
системы регулирования задатчика
интенсивности ЗИ (интегратора). ЗИ
формирует линейно изменяющийся во
времени сигнал задания скоростиuзс,
нарастающий или спадающий до заданного
уровня. Выходной сигнал задатчика
интенсивности изменяется по закону
было бы одинаковым и не зависело от
величины и характера момента сопротивления.
В этих случаях управление электроприводом
осуществляется от включенного на входе
системы регулирования задатчика
интенсивности ЗИ (интегратора). ЗИ
формирует линейно изменяющийся во
времени сигнал задания скоростиuзс,
нарастающий или спадающий до заданного
уровня. Выходной сигнал задатчика
интенсивности изменяется по закону
 ,
(15.38)
,
(15.38)
где: Тзи – постоянная времени задатчика интенсивности.
По существу ЗИ
подает на вход системы сигнал заданного
ускорения
![]() ,
определяющий время переходного процесса.
Система должна отрабатывать этот сигнал
с требуемой точностью. Сигнал на выходе
задатчика интенсивности определяется
соотношением
,
определяющий время переходного процесса.
Система должна отрабатывать этот сигнал
с требуемой точностью. Сигнал на выходе
задатчика интенсивности определяется
соотношением
![]() .
(15.39)
.
(15.39)
Для оценки качества системы регулирования в режимах формирования переходных процессов при управлении от ЗИ следует определить величину ошибки, с которой отрабатывается линейно изменяющееся задающее воздействие uзс(t) при МО.
![]() .
(15.40)
.
(15.40)
График переходного
процесса в контуре скорости, настроенного
на МО при управлении от ЗИ приведен на
рис.15.14. Установившаяся ошибка определяется
соотношениями (15.40), т.е. скорость двигателя
![]() постоянно отстает от
постоянно отстает от![]() .
.


Рис.15.14.
Переходный процесс отработки сигнала
ЗИ uЗС(t)
в контуре скорости, настроенном нка МО Рис.15.15.
Переходный процесс отработки сигнала
ЗИ uЗС(t)
в контуре скорости, настроенном на СО
В контуре скорости,
настроенном на СО, ошибка воспроизведения
сигнала
![]() находится из соотношения
находится из соотношения
![]() ,(15.41)
,(15.41)
Рис.15.16.
Переходный процесс пуска и торможения
в системе регулирования скорости с
задатчиком интенсивности на входе при
Мс=Мн,
uзс>>uгр
при настройке МО

![]() ,
при этом момент сопротивленияМс=Мн.
,
при этом момент сопротивленияМс=Мн.
На участке пуска
момент двигателя М=Мдин+Мс=2Мн,
следовательно, ток якоря Iя=2Iян.
На участке торможения момент двигателя
равен М=-Мдин+Мс=0.
Следовательно, ток якоря равен нулю, и
торможение происходит только под
действием статического момента. В каждый
момент времени в соответствии с (15.40)
скорость двигателя отстает от заданной
на величину
![]() .
.