2.4.2 Описание функционирования операционного автомата по принципиальной схеме
Соответствие элементов принципиальной схемы элементам функциональной схемы представлено ниже:
- магистральный приемопередатчик МА1 и МА2 реализован на элементе D11;
- регистры R1, R2, R3 и RSM реализованы на элементах D12, D13, D14, D30 соответственно;
- буферные элементы BF1…BF4 реализованы на элементах D23, D21, D22, D29 соответственно;
- схемы AND реализованы на элементах D15, D16 и D24, D25;
- схемы OR1 и OR2 реализованы на элементах D17, D18 и D19, D20;
- схема SM реализована на элементах D26, D27;
- схема формирования признаков реализована на элементах D28.1, D28.2, D2.2, D3.6;
- регистр признаков реализован на элементе D31.
Данные с внешней шины поступают на входы
магистрального  приемопередатчика
D11. Этот элемент имеет вход управления
третьим состоянием и вход управления
направлением передачи информации. При
поступлении на этот входы D11 низкого
уровня сигнала у1 и высокого уровня
сигнала у2 данные через приемопередатчик
поступают на входы регистров D12, D13, D14.
Запись информации на эти регистры
осуществляется по переднему фонту
сигналов у18, у19 и у20, поступающих на
входы С регистров. Все эти регистры
также имеют выходы с тремя состояниями,
что позволяет объединять их выходы в
общую магистраль. При работе на общую
магистраль выходы только одного элемента
могут быть открыты, а выходы остальных
должны быть переведены в состояние
высокого импеданса.
приемопередатчика
D11. Этот элемент имеет вход управления
третьим состоянием и вход управления
направлением передачи информации. При
поступлении на этот входы D11 низкого
уровня сигнала у1 и высокого уровня
сигнала у2 данные через приемопередатчик
поступают на входы регистров D12, D13, D14.
Запись информации на эти регистры
осуществляется по переднему фонту
сигналов у18, у19 и у20, поступающих на
входы С регистров. Все эти регистры
также имеют выходы с тремя состояниями,
что позволяет объединять их выходы в
общую магистраль. При работе на общую
магистраль выходы только одного элемента
могут быть открыты, а выходы остальных
должны быть переведены в состояние
высокого импеданса.
 Выполнение
отдельных микрокоманд спецпроцессора
описано в разделе 3.3. Следует отметить
то обстоятельство, что в целях повышения
производительности устройства, оно
реализовано как комбинация схемы с
непосредственными связями и магистральной
организацией. Это привело к тому, что
схема несколько усложнилась из-за
введения дополнительных буферных
элементов. Однако значительно повысилось
быстродействие схемы. Так все микрооперации
(за исключением операций сдвига)
выполняются в течение одного такта
сигнала синхронизации. При чисто
магистральной организации среднее
выполнение одной микрооперации повысилось
бы до 4-5 тактов сигнала синхронизации.
Выполнение
отдельных микрокоманд спецпроцессора
описано в разделе 3.3. Следует отметить
то обстоятельство, что в целях повышения
производительности устройства, оно
реализовано как комбинация схемы с
непосредственными связями и магистральной
организацией. Это привело к тому, что
схема несколько усложнилась из-за
введения дополнительных буферных
элементов. Однако значительно повысилось
быстродействие схемы. Так все микрооперации
(за исключением операций сдвига)
выполняются в течение одного такта
сигнала синхронизации. При чисто
магистральной организации среднее
выполнение одной микрооперации повысилось
бы до 4-5 тактов сигнала синхронизации.
3 Расчет периода синхросигналов
Период
синхросигналов определяется
продолжительностью элементарной
операции, имеющей максимальную
длительность. Это
в свою очередь зависит от количества
элементов, через которые проходит  сигнал
во время выполнения операции, а также
временем задержки этих элементов.
сигнал
во время выполнения операции, а также
временем задержки этих элементов.
Типовые значения времени задержки элементов, применяемых в разрабатываемом устройстве, приведены в таблице 2.
Таблица 2 -Значения времени задержки элементов
|
Наименование элемента |
Время задержки,нс |
|
К555ИЕ19 |
60 |
|
К555ИР24 |
18 |
|
К555ИР23 |
26,5 |
|
К573РФ2 |
450 |
|
К555АП6 |
16 |
|
К555ИМ6 |
23 |
|
К555ЛИ1 |
24 |
|
К555ЛЛ1 |
22 |
Анализируя содержание таблицы 2, видим, что задержка элементов, на которых реализован управляющий автомат, сопоставима с временем задержки элементов операционного автомата. Следовательно, чтобы обеспечить нормальную работу всей схемы спецпроцессора, необходимо выбрать тактовую частоту таким образом, чтобы обеспечивалась корректная работа схемы как управляющего так и операционного автоматов.
Проанализируем формирование сигналов управляющего автомата с помощью временных диаграмм, представленных на рисунке 9.
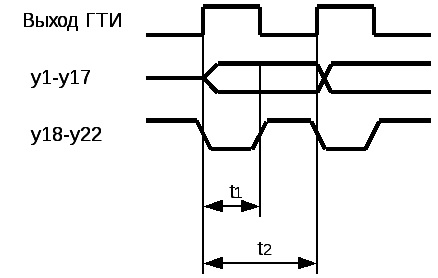
Рисунок 9 -Формирование сигналов управляющего автомата
Предположим, что скважность тактовых
импульсов равна 2.  Тогда
интервал времени t1 представляет
собой время считывания данных из ППЗУ,
которое равно 450нс.
Тогда
интервал времени t1 представляет
собой время считывания данных из ППЗУ,
которое равно 450нс.
Максимальное время задержки счетчика К555ИЕ19 равно 60 нс.
Исходя из вышесказанного, приходим к выводу, что для нормального функционирования управляющего автомата спецпроцессора период тактовых импульсов не должен быть меньше удвоенного времени считывания данных из ППЗУ, то есть 2·450=900 нс.
Проанализируем формирование сигналов операционного автомата с помощью временных диаграмм, представленных на рисунке 10. Эти временные диаграммы иллюстрируют выполнение одной из наиболее продолжительных микроопераций RSM:=(R1vR3)+RSM.

Рисунок 10 -Формирование сигналов операционного автомата
Интервал времени t1определяется временем считывания информации с регистровR1,R3 иRSMа также временем задержки схемыOR1, сумматораSM,буферных элементовBF1,BF4 и временем записи информации на регистр RSM, что составляет
t1=tRG+tOR +tSM+ 2·tBF+tRSM, (1)
где:
t1= 26,5 + 22 + 23 + 2·16 + 18 = 121,5 нс
Интервал времени t2-t1определяется временем записи информации на регистр RSM и составляет 18 нс.
Таким образом получаем, что при скважности ТИ равной 2 период ТИ будет равен
tТИ=2∙t1=243 нс
Так как время задержки управляющего автомата больше задержки операционного автомата, то период тактовых импульсов определяется
tТИ = 900 нс,
а частота
fти= 1/900·10-9= 1,1 Мгц