

3. Расчет физически реализуемого компенсатора.
Одной из главных целей, преследуемых при синтезе автоматической системы, является обеспечение требуемой точности в установившихся и переходных режимах. Эффективным средством устранения противоречия между условиями точности в установившихся и переходных режимах служит компенсация внешних воздействий, осуществления инвариантности.
Система считается инвариантной по отношению к некоторому возмущению, если по окончании переходного процесса, определяемого начальными условиями, сама регулированная величина и ошибка регулирования от возмущения не зависят.
Полное уравнение исследуемой системы имеет вид:
 . (3.1)
. (3.1)
Чтобы система была инвариантна к возмущающему воздействию, нужно, чтобы вторая дробь стремилась к нулю. Отсюда получаем условие инвариантности выхода к возмущению:
 . (3.2)
. (3.2)
Тогда передаточная функция компенсатора имеет вид:
 . (3.3)
. (3.3)
Запишем найденные передаточные функцииобъекта по управляющему и возмущающему каналам:
 , (3.4)
, (3.4)
 .
(3.5)
.
(3.5)
Определим передаточную функцию компенсаторапо формуле (3.3):
 . (3.6)
. (3.6)
Напишем разложение:
 , (3.7)
, (3.7)
 (3.8)
(3.8)
На практике, как правило, никогда не удается обеспечить условия полной инвариантности (3.3), поэтому стремятся выполнить лишь частичные условия инвариантности, при которых в пределах возможного будет обеспечиваться минимальное отклонение регулируемой величины, вызванное этим возмущением.
Тогда задача сводится к поиску простейшего,
технически реализуемого элемента, одним
из таких элементов может быть например,
звено с передаточной функцией (3.9), где
 и
и - значения параметров компенсатора, при
которых осуществляются наилучшее из
возможных приближений.
- значения параметров компенсатора, при
которых осуществляются наилучшее из
возможных приближений.
Передаточная функция компенсатора имеет вид:
 , (3.9)
, (3.9)
где k– коэффициент усиления по формуле (3.8)
Тк1 и Тк2, рассчитываем по методу Смольникова приведенном в литературе [3] :

Отсюда передаточная функция компенсатора имеет вид:
 (3.10)
(3.10)
4. Построение переходного процесса в системе по задающему и возмущающему воздействию. Определение показателей качества регулирования.
В соответствии с заданием для проверки правильности выполненных расчётов нужно построить переходные процессы в САУ по задающему воздействию. Расчет переходных характеристик проведем на ПЭВМ частотным методом, суть которого приведена ниже.
На первом этапе по заданной на ЭВМ
передаточной функции замкнутой системы
Wз(р) рассчитывается
вещественная частотная характеристика
замкнутой системы. Для этого в выражениеWз(р) подставляют и, меняя частотуот 0 до, вычисляют
вещественную часть
и, меняя частотуот 0 до, вычисляют
вещественную часть :
:
 при= 0;1;2, …,max.
(4.1)
при= 0;1;2, …,max.
(4.1)
Поскольку практически невозможно вычислить (4.1) для всего диапазона частот от 0 до , приходится ограничиться некоторой максимальной частотойmax, которая выбирается таким образом, чтобы приmaxвещественная частотная характеристика принимала пренебрежимо малые значения, например менее 5% от начального значения Рз(0).
Второй этап расчёта заключается в получении переходного процесса по найденной на первом этапе Рз() в диапазоне 0max. Для этого используется известное выражение:
 приt0. (4.2)
приt0. (4.2)
Интеграл (4.2) вычисляется приближённым (численным) методом для ряда значений времени t: отt= 0 доt=tmax. Максимальное значение времениtmaxвыбирают таким образом, чтобы к моментуt=tmaxпереходный процессy(t) практически закончился.
Для проверки правильности выполненных
расчетов
 рассчитаем переходный процесс в системе
по заданию. Для этого воспользуемся
уравнением:
рассчитаем переходный процесс в системе
по заданию. Для этого воспользуемся
уравнением:
 ,
где (4.3)
,
где (4.3)
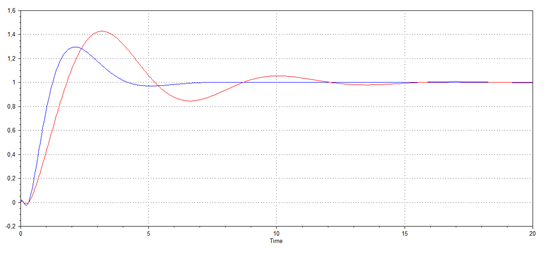
Рисс.1 графике переходные процесы по заданию при оптимальных параметрах и при неоптимальных параметрах
 ,
, ,
, ,
, По
первой части уравнения (4.3) с помощью
программы «matlab» строим переходную
характеристику по управляющему каналу
(рис. 5), по второй части уравнения строим
переходную характеристику по возмущающему
каналу с компенсатором и без него (рис.
6-7).
По
первой части уравнения (4.3) с помощью
программы «matlab» строим переходную
характеристику по управляющему каналу
(рис. 5), по второй части уравнения строим
переходную характеристику по возмущающему
каналу с компенсатором и без него (рис.
6-7).
Рис.5 График переходной характеристики по управляющему каналу
Данные для определения показателей качества переходной характеристики по задающему воздействию находим из графика (рис.5).
- статическое отклонение:
 ;
;
- время регулирования:
 с;
с;
- перерегулирование:
 ;
;
- степень затухания:
 ;
;
Из этого следует, что синтезированная САУ отвечает заданным требованиям
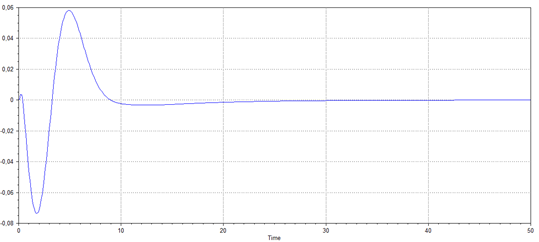
Рис.6. График переходной характеристики по возмущающему каналу с компенсатором
Определим показатели качества переходной характеристики по возмущающему каналу с компенсатором (рис.6):
- статическое отклонение:
 ;
;
- время регулирования:
 с;
с;
- перерегулирование:
 ;
;
- степень затухания:
 ;
;
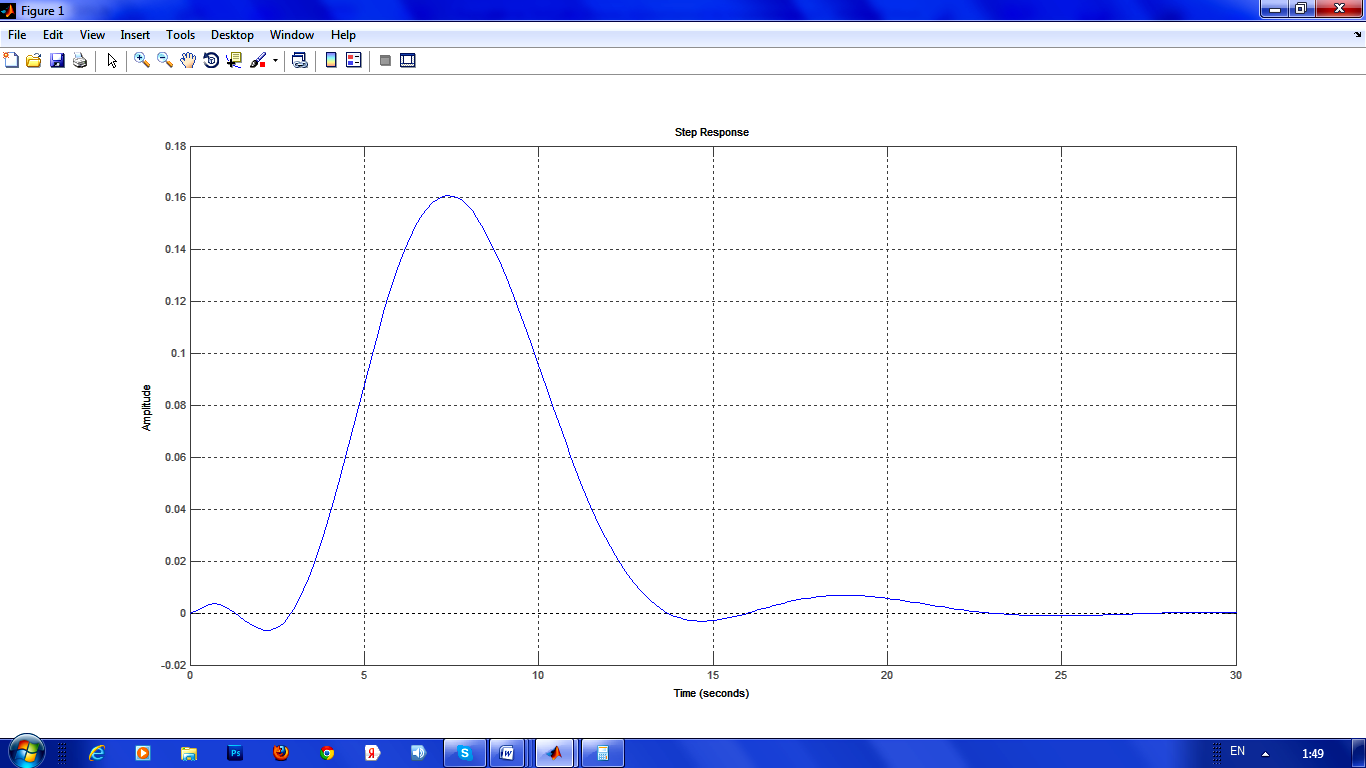
Рис.7. График переходной характеристики по возмущающему каналу без
Компенсатора