

5. Непосредственное цифровое управление (нцу).
Система автоматического регулирования
с НЦУ (рис.8) содержит объект управления
и автоматический регулятор. Роль
последнего выполняет ЭВМ, снабженная
рядом устройств для преобразования
сигналов из аналоговой формы в цифровую
(АЦП), а также из цифровой формы в
аналоговую (ЦАП). На рисунке 8 аналоговые
сигналы обозначены как функции времени
 .
.
ОУ ВМ ЦАП АЦП













Рис.8. Структурная схема системы НЦУ
Соответствующие цифровые сигналы
отличаются от них не только формой
представления величин, но и дискретным
характером изменения во времени.
Изменение во времени цифровых сигналов
производится в моменты времени
 ,
где
,
где – интервал дискретности;
– интервал дискретности; .
Интервал дискретности
.
Интервал дискретности выбирается из условия
выбирается из условия ,
где
,
где – постоянная времени интегрирования
непрерывного регулятора.
– постоянная времени интегрирования
непрерывного регулятора.
Алгоритм работы ЭВМ, осуществляющий автоматическое регулирование, может быть получен из уже найденного закона регулирования непрерывного регулятора.
Уравнение регулятора:
Определим интервал дискретности:
 с.
с.
Управляющее воздействие цифрового регулятора с компенсацией возмущения имеет вид:

 . (5.1)
. (5.1)
ПИ-закон регулирования имеет вид:
 . (5.2)
. (5.2)
Компенсирующее воздействие на предыдущем интервале дискретности:
 . (5.3)
. (5.3)
Подставим числовые значения ПИ-регулятора и интервала дискретности:
 ,
,
 .
.
Имеем:
 , (5.4)
, (5.4)
 . (5.5)
. (5.5)
Вычтем из уравнения (5.4) уравнение (5.5) и получим:
 ,
,
 . (5.6)
. (5.6)
Учитывая, что
 и
и ,
подставляем их в уравнение (5.6):
,
подставляем их в уравнение (5.6):


 ] (5.7)
] (5.7)
Передаточная функция компенсатора:
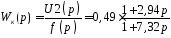 ,
где Кк=0,49, Т1к=2,94, Т2к =7,32
,
где Кк=0,49, Т1к=2,94, Т2к =7,32
Путем несложных преобразований найдем
 :
:
 ,
,
 ,
,
 ,
,
 ,
,
 . (5.8)
. (5.8)
Путем сложения (5.7) и (5.8) окончательно запишем управляющее воздействие цифрового регулятора с компенсацией возмущений:

 .
(5.9)
.
(5.9)
Полученное выражение используется для составления программы НЦУ.
Цикл работы НЦУ включает следующие пункты:
-опрос датчиков всех входных величин в дискретные моменты времени Т0, преобразование их в цифровой код с помощью АЦП и ввод в машину;
-расчет управляющего воздействия в соответствии с алгоритмом (5.9);
-проверка полученного управляющего
воздействия на безопасность (величина
управляющего воздействия проверяется
на нахождение в зоне допустимых значений
 ).
).
-если это условие выполняется, управляющее воздействие передается на ЦАП, и остается постоянной в течении Т0.Если неравенство не выполняется, то дается сигнализация и происходит отключение автоматики.
Блок схема алгоритма в соответствии с изложенным представлена на рис.9.
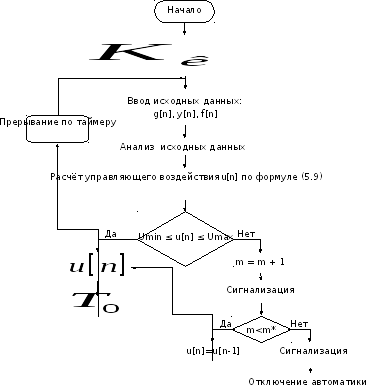
Рис.9. Блок-схема алгоритма НЦУ
6. Построение сау с использованием методов нечёткой логики
Необходимо составить структурную схему САУ с нечётким компенсатором, подав на него сигналы возмущения fи его производнойf’.
 На
рисунке 10 представлена структурная
схема комбинированной системы
регулирования сFuzzy-компенсатором:
На
рисунке 10 представлена структурная
схема комбинированной системы
регулирования сFuzzy-компенсатором:
UK U
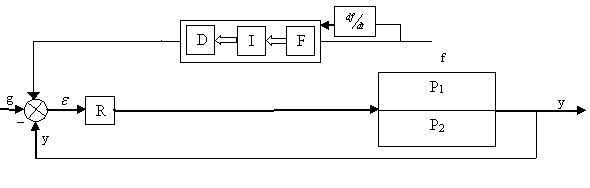
Рис. 10. Структурная
схема САУ сFuzzy-компенсатором
Fuzzy-компенсатор содержит три основных блока:F– блок фаззификации БФ,I– блок нечеткого вывода БНВ (блок принятия решений),D– блок дефаззификации БДФ.
Вся информация о стратегии управления заложена в базе знаний в виде правил условного логического вывода: Если….. тогда… Эти правила получаются за счет тщательного изучения ОУ и цели его управления путем анкетного опроса экспертов (технологи-операторы, специалисты по автоматизации).
Центральным звеном является БНВ, в котором нечеткая информация о возмущении f(его производной) формирует нечеткое множество управления.
Выполняется инференц-процедура, в результате которой объединяются выводы нечетких правил, и результатом этого объединения является усеченное множество управляющих воздействий.
БФ преобразует конкретное измеренное значение возмущения с помощью некоторой функции принадлежности в нечеткое множество. В БДФ происходит обратный процесс.