

Расчёт управляющего воздействия нечёткого регулятора
Необходимо рассчитать компенсирующее
воздействие нечёткого компенсатора u2для случая, когда = 0,1 и
= 0,1 и =f1’=0,3.
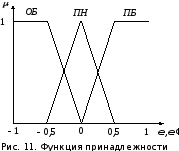
Функция принадлежности возмущающего
сигнала f и его первой производной f/приведена на рисунке 11. Упрощённый
алгоритм нечёткого управления представлен
следующим правилом:
=f1’=0,3.
Функция принадлежности возмущающего
сигнала f и его первой производной f/приведена на рисунке 11. Упрощённый
алгоритм нечёткого управления представлен
следующим правилом:
Правило №1: Если f= ПН Иf’= ПБ, тогдаUк= ОБ;
Правило №2: Если f= ОБ ИЛИf’= ПБ, тогдаUк= ПН.

Еслисчитать, что = 0,25 есть ОБ, то по функции принадлежности
находим степень принадлежности
= 0,25 есть ОБ, то по функции принадлежности
находим степень принадлежности к ОБ:
к ОБ: .
(см. приложение 3)
.
(см. приложение 3)
Если считать, что  = 0,3 есть ПН, то по функции принадлежности
находим степень принадлежности
= 0,3 есть ПН, то по функции принадлежности
находим степень принадлежности к ПН:
к ПН: .
.
Если считать, что  = 0,25 есть ОБ, то по функции принадлежности
находим степень принадлежности
= 0,25 есть ОБ, то по функции принадлежности
находим степень принадлежности к ОБ:
к ОБ: .
.
Если считать, что  =
0,3 есть ПБ, то по функции принадлежности
находим степень принадлежности
=
0,3 есть ПБ, то по функции принадлежности
находим степень принадлежности к ПБ:
к ПБ: .
.
На основании правила Мамдани т.к между
 стоит союзИ, то усекаем функции
принадлежности на min на уровне, а если
между парами стоит союзИЛИ, усекаем
функцию принадлежности управляющего
воздействия
стоит союзИ, то усекаем функции
принадлежности на min на уровне, а если
между парами стоит союзИЛИ, усекаем
функцию принадлежности управляющего
воздействия на max уровне. Полученное нечеткое
множество представлено заштрихованной
фигурой.
на max уровне. Полученное нечеткое
множество представлено заштрихованной
фигурой.
Дефаззификацию выполним по методу
центра тяжести. В соответствии с ним,
чёткое управляющее воздействие есть
абсцисса центра тяжести полученной
фигуры
 .
.

Заключение
В данной работе выполнен синтез комбинированной САУ техническим объектом, заданным в форме экспериментальных переходных характеристик. Произведен выбор математической модели объекта управления в форме передаточных функций по управляющему и возмущающему каналам, выбран ПИ алгоритм управления и произведен расчет параметров ПИ-регулятора графоаналитическим методом. Рассчитан физически реализуемый компенсатор, обеспечивающий компенсацию возмущений. Построены кривые переходных процессов в системе и определены показатели качества. Осуществлен переход от аналогового (непрерывного) регулятора к НЦУ. Построена САУ с использованием методов нечёткой логики. Рассчитано компенсирующее воздействие нечёткого компенсатора.
Список используемой литературы
Лукас В.А. Основы теории автоматического управления. Л.: Недра, 2005г.
Медведев Р.Б., Бондарь Ю.Д., Романенко В.Д. АСУ в металлургии. М.: Металлургия, 1987г.
Марюта А.Н., Качан Ю.Г., Бунько В.А. Автоматическое управление технологическими процессами обогатительных фабрик. М.: Недра, 1983г.
Ротач В.Я. Теория автоматического управления. М.: Издательство МЭИ, 2004.
Ротач В.Я., Шавров А.В., Бутырев В.П. Синтез алгоритмов машинного расчета оптимальных параметров систем регулирования. М.: Теплоэнергетика, 1978, №12.
Приложение 1
Рис.1.График экспериментальной переходной характеристики по управляющему каналу
Рис.2.График экспериментальной переходной характеристики по возмущающему каналу