

Введение в реактор 1
Rigid Bodies (Жесткие тела) 2
Получение коллекции 3
Основы имитации 4
Типы геометрии 5
Геометрия имитации 5
Построение жесткого тела 7
Создание покачивания 8
Другой подход 10
Точность имитации 11
Сборка имитации 12
Использование тел с анимацией 15
Подготовка вывода 16
Уменьшение размера файла 17
Тряпичная кукла 18
Настройка сцены с куклой 18
Придание объектам физических свойств 19
Соединение конечностей 25
Использование ограничителей Hinge 26
Настройка суставов (Knees, Elbows, Ankles, Wrists) 27
Применение ограничителей Rag Doll 32
Настройка бедер, спины, шеи и плеч (Hips, Back, Neck and Shoulders) 37
Создание анимации 40
Введение в реактор
Это пособие познакомит с процессом создания анимации на основе физических свойств с использованием динамики реактора (reactor), встроенной в 3ds Max.
Имеется много положений, в которых анимация вручную с созданием ключей для объектов может быть полностью заменена, или, по меньшей мере, продолжена созданием ключей автоматически с использованием физических свойств.
Например, можно представить себе создание вручную анимации с вываливанием тысячи мячей из корзины, причем, только с касанием и реалистичным поведением при столкновении друг с другом и окружением. В реакторе для этой анимации достаточно создать корзину с тысячей сфер и придать каждому объекту физические свойства типа массы.
После задания исходных положений объектов их поведение в дальнейшем рассчитывается автоматически.
В этом пособии будут использованы средства реактора для создания игрушки с низким центром тяжести. Затем будут созданы копии игрушки, с использованием Preview Window и с помощью средства обновления положений в 3ds Max упакованы в ящик.
Затем вручную будет создана анимация с опрокидыванием ящика. Реактор создаст анимацию с вываливания игрушек на пол.
Уровень мастерства: промежуточный. Время урока: 90 минут.
Необходимые для работы файлы содержит папка \tutorials\reactor\introduction.
Rigid Bodies (Жесткие тела)
Объекты физической имитации реактора, в этом примере игрушки с ящиком и полом, известны как жесткие тела (rigid bodies). Они являются строительными блоками физических сцен, и могут иметь любой тип геометрии.
В этом разделе будут созданы два простых примитива и присвоены им физические свойства.
Создание жесткого тела:
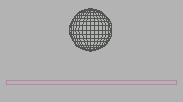
В новой сцене на панели Create щелчок Sphere.
В окне Perspective вытягивание сферы. На панели Create ввод Radius = 25.0.
На панели Create щелчок Box.
Построение Box под сферой. Ввод Length и Width по 200.0 и Height = 5.0.
Примечание: Смещение Box вниз для отсутствия касания со сферой.
Теперь необходимо задать сфере физические свойства.
 Выбор
сферы и щелчок Open
Property
Editor
на панели инструментов reactor.
Выбор
сферы и щелчок Open
Property
Editor
на панели инструментов reactor.
Примечание: При отсутствии панели реактора следует щелкнуть по пустому месту главной панели и выбрать reactor из контекстного меню.
Сфере еще не были заданы свойства, диалог показывает значения по умолчанию.
Примечание: Если не выбран объект сцены или выбран объект, который не может быть жестким телом (например, коллекция), диалог не доступен.
Представлен свиток Physical Properties.
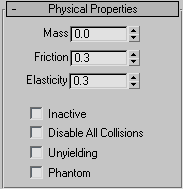
По умолчанию значение массы Mass = 0.0, это означает, что тело в имитации неподвижно. Однако в этом примере сфера падает на Box, который будет в имитации полом. Поэтому сфере следует задать массу.
Ввод Mass = 50.0.
Без заданных физических свойств объект автоматически использует в имитации свойства жесткого тела по умолчанию. В этом примере пол неподвижен, так что свойства по умолчанию для него подходят. Его масса Mass = 0.0, поэтому он неподвижен.
Теперь имеется два объекта с физическими свойствами. Однако сцена еще не готова к имитации. Следует явно добавить объекты в имитацию, используя коллекцию жестких тел (Rigid Body Collection).