

Лекция 6. Уравнения прямой и плоскости в пространстве
6.1. Плоскость в пространстве
6.2. Прямая в пространстве
6.3. Взаимное расположение прямой и плоскости в пространстве
6.1. Плоскость в пространстве
Пусть точка M0(x0,y0,z0) принадлежит плоскости П.
Определение.
Всякий ненулевой вектор
 ,
перпендикулярный к плоскости, называется
нормальным вектором плоскости.
,
перпендикулярный к плоскости, называется
нормальным вектором плоскости.
Теорема
1. Если
плоскость проходит через точку
M0(x0,y0,z0)
и её нормальный вектор
 ,
то уравнение плоскости имеет вид:
,
то уравнение плоскости имеет вид:
 .
.
Доказательство. Пусть M(x,y,z) – текущая точка плоскости, тогда
 принадлежит
плоскости. Так как
принадлежит
плоскости. Так как
 -
нормальный вектор плоскости, то
-
нормальный вектор плоскости, то ,
но
,
но

Теорема
2. Всякое
линейное уравнение с тремя переменными
 определяет плоскость в пространстве,
если хотя бы одно из трех чисел
определяет плоскость в пространстве,
если хотя бы одно из трех чисел .
.
Уравнение
(1) называется общим уравнением плоскости.
При этом, если в уравнении отсутствует
какая-либо переменная, то плоскость
параллельна соответствующей оси
координат, например: плоскость
 Если в уравнении (1)D=0,
то плоскость
Если в уравнении (1)D=0,
то плоскость
 проходит через начало координат.
проходит через начало координат.
Предположим, что в общем уравнении плоскости все коэффициенты отличны от нуля, т.е. плоскость пересекает все координатные оси и не проходит через начало координат. Преобразуем уравнение (1):




– уравнение плоскости в отрезках, где a, b, c – отрезки, которые отсекает плоскость на координатных осях оx, оy и оz соответственно.
Замечание:
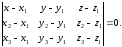
Уравнение плоскости, проходящей через три точки
 (x1,y1,z1),
(x1,y1,z1),
 (x2,y2,z2),
(x2,y2,z2),
 (x3,y3,z3),
имеет вид:
(x3,y3,z3),
имеет вид:
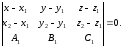
Уравнение плоскости, проходящей через две точки
 (x1,y1,z1)
и
(x1,y1,z1)
и
 (x2,y2,z2)
перпендикулярно плоскости
(x2,y2,z2)
перпендикулярно плоскости
 имеет вид:
имеет вид:
3)
Уравнение плоскости, проходящей через
точку M0(x0,y0,z0)
перпендикулярно двум непараллельным
плоскостям
 и
и
 имеет
вид:
имеет
вид:

Рассмотрим взаимное расположение плоскостей в пространстве. Пусть даны две плоскости
П1:
П2:
Определение. Под углом между двумя плоскостями понимают один из двух смежных двугранных углов.
Угол
между двумя плоскостями равен углу
между нормальными векторами этих
плоскостей. Вычисляется этот угол по
формуле:

Условия
параллельности и перпендикулярности
плоскостей определяются условиями
коллинеарности и перпендикулярности
их нормальных векторов.
 – необходимое и достаточное условие
параллельности плоскостей;
– необходимое и достаточное условие
параллельности плоскостей;
 или
или
 – необходимое и достаточное условие
перпендикулярности плоскостей.
– необходимое и достаточное условие
перпендикулярности плоскостей.
Расстояние
от точки M*(x*,y*,z*)
до плоскости П:
вычисляется
по формуле:
 .
.
6.2. Прямая в пространстве
Рассмотрим
прямую l
с принадлежащей ей точкой M0(x0,y0,z0).
Определение.
Всякий ненулевой вектор
 называется направляющим вектором
прямой.
называется направляющим вектором
прямой.
Положение
прямой в пространстве R3
однозначно определяется принадлежащей
ей точкой M0(x0,y0,z0)
и направляющим вектором
 .
.
Рассмотрим различные виды уравнений прямой.
Пусть M(x,y,z) – текущая точка прямой. Тогда вектор


 -
канонические
уравнения прямой.
-
канонические
уравнения прямой.
2)
Обозначим
тогда


и -
параметрические уравнения прямой в
пространстве.
-
параметрические уравнения прямой в
пространстве.
3)
Пусть даны две точки M1(x1,y1,z1)
и M2(x2,y2,z2)
прямой,
 Так как
Так как ,
то вектор
,
то вектор можно взять за направляющий и,
воспользовавшись каноническими
уравнениями прямой, получим:
можно взять за направляющий и,
воспользовавшись каноническими
уравнениями прямой, получим:

– уравнение прямой, проходящей через две точки.
4) Прямую в пространстве можно рассматривать как пару пересекающихся плоскостей, а именно:
система
 определяет общие уравнения прямой.
определяет общие уравнения прямой.
Рассмотрим
правила перехода от канонических
уравнений к общим и наоборот.
Так
как

Переход от общих уравнений к каноническим осуществляется таким образом:
1) выражают x через y, исключив z в (1);
2) выражают x через z, исключив y в (1);
3) составляют канонические уравнения.
Пример.
Составить канонические уравнения прямой

Решение
1. Сложив уравнения системы, получим:

2.
Аналогично из системы
 получим
получим


3.
Запишем канонические уравнения прямой
 .
Полученная прямая проходит через точкуM(0,-4,-13)
и имеет направляющий вектор
.
Полученная прямая проходит через точкуM(0,-4,-13)
и имеет направляющий вектор

Рассмотрим взаимное расположение прямых в пространстве.
Пусть
даны две прямые:

Определение. Углом между прямыми l1 и l2 называется угол между направляющими векторами этих прямых.
Этот угол вычисляется по формуле:

Условия параллельности и перпендикулярности прямых определяются условиями коллинеарности и перпендикулярности их направляющих векторов.
 –необходимое
и достаточное условие параллельности
прямых;
–необходимое
и достаточное условие параллельности
прямых;



–необходимое и достаточное условие перпендикулярности прямых.