

Глава 2. Технические средства измерений электрических величин
Электромеханические измерительные приборы
Электромеханические измерительные приборы (ЭИП) от- личаются простотой, дешевизной, высокой надежностью, разно- образием применения, относительно высокой точностью.
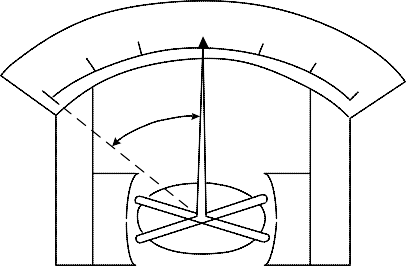
Любой ЭИП состоит из ряда функциональных преобразовате- лей, каждый из которых решает свою элементарную задачу в цепи преобразований. Так, самый простейший измерительный электро- механический прибор прямого преобразования (вольтметр, ампер- метр) состоит из трех основных преобразователей: измерительной цепи (ИЦ), измерительного механизма (ИМ) и отсчетного устрой- ства (ОУ) (рис. 2.1).
Измерительная цепь обеспечивает преобразование электри- ческой измеряемой величины X в промежуточную электрическую величину Y (ток или напряжение), функционально связанную с измеряемойвеличинойи непосредственно воздействующую на измерительный механизм.
Измерительная
цепь
Y
Измерительный
механизм α
Отсчетное
устройство
![]()
Рис. 2.1. Структурная схема электромеханического измерительного прибора прямого преобразования
Измерительный механизм является электромеханическим преобразователем, осуществляющим преобразование электриче- ской величины Y в наглядное аналоговое показание – угол α.
На магнитном воздействии электрического тока основаны магнитоэлектрический, электромагнитный, индукционный, элек- тродинамический и вибрационный измерительные механизмы.
Тепловое воздействие электрического тока используют биме- таллический и тепловой измерительные механизмы. На взаимо- действии заряженных электродов, находящихся под напряжени- ем, основан принцип работы электростатического измерительно- го механизма.
Отсчетное устройство состоит из указателя, жестко связан- ного с подвижной частью ИМ, и неподвижной шкалы. Указатели бываютстрелочные (механические) и световые.
Шкала – это совокупность отметок в виде штрихов, располо- женных вдоль линии, по которым определяют числовое значение измеряемой величины. Шкалы градуируют в единицах измеряе- мой величины – именованная шкала, либо в делениях – неимено- ванная шкала. В общем случае на подвижную часть ИМ при ее движении воздействуют моменты: вращающий Мвр, противодей- ствующий Мпр и успокоения Мусп.
Вращающий момент Мвр для ИМ, использующих силы элек- тромагнитного поля:
Mвр = dWм/dα, (2.1)
где dWм – изменение запаса энергии магнитного поля; α – угол отклонения подвижной части.
Противодействующий момент Мпр в электромеханических приборах необходим для создания однозначного соответствия измеряемой величины определенному углу отклонения подвиж- ной части. В аналоговых электромеханических приборах проти- водействующий момент создается либо при помощи спиральных пружин (растяжек и подвесов), либо за счет энергии электромаг- нитного поля (в логометрах).
В случае, когда противодействующий момент создается спи- ральной пружинкой:
Mпр = Wα, (2.2)
где Wα – удельный противодействующий момент, зависящий от геометрическихразмеров и материала пружины (растяжек).
Момент успокоения Мусп является моментом сил сопротивле- ния движению, направлен всегда навстречу движению подвиж- ной части ИМ и пропорционален угловой скорости отклонения:
Mусп = P(dα/dt), (2.3)
где Р –коэффициент успокоения (демпфирования).
В измерительных механизмах наиболее часто применяют магнитоиндукционныеивоздушныеуспокоители. Для созда- ния очень большого успокоения применяют жидкостные успо- коители.
Несмотря на большое разнообразие конструкций и типов при- боров все они имеют ряд общих узлов и деталей. Такими деталя- ми являются: корпус, шкала, указатель, устройства для установки и уравновешивания подвижной части, создания противодейству- ющего момента и успокоения, корректор, а в высокочувствитель- ных приборах – арретир.
Магнитоэлектрические приборы. Магнитоэлектрические приборы (МЭП) состоят из измерительной цепи, измерительного механизма и отсчетного устройства (см. рис. 2.1). Конструктивно измерительный механизм может быть выполнен либо с подвиж- ным магнитом, либо с подвижной катушкой. На рис. 2.2 показана конструкция прибора с подвижной катушкой. Постоянный маг- нит 1, магнитопровод сполюсными наконечниками 2 и непо- движный сердечник 3 составляют магнитную систему механизма. В зазоре между полюсными наконечниками и сердечником со- здается сильное равномерное радиальное магнитное поле, в кото- ром находится подвижная прямоугольная катушка 4, намотанная медным или алюминиевым проводом на алюминиевом каркасе (применяют ибескаркасные рамки). Катушка (рамка) 4 может поворачиваться в зазоре на полуосях 5 и 6. Спиральные пружины
7 и 8 создают противодействующий момент и используются для подачи измеряемого тока от выходных зажимов прибора в рамку (механические и электрические соединения на рис. 2.2 не показа- ны). Рамка жестко соединена со стрелкой 9. Для балансировки подвижной части имеются передвижные грузики 10.
Запас электромагнитной энергии в контуре с током I, находя- щемся в поле постоянного магнита, выражается формулой
Wм = IΨ, (2.4)
где Ψ – полное потокосцепление данного контура с магнитным полем постоянного магнита.
 4
5
4
5
S N
1
9 2 6 3 2
7
8
10
Рис. 2.2. Схема устройства магнитоэлектрического прибора:
1 – постоянный магнит; 2 – полюсные наконечники; 3 – неподвижный сердечник; 4 – прямоугольная катушка; 5, 6 – полуоси, 7, 8 – спиральные пружины; 9 – стрелка; 10 – передвижные грузики
Тогда выражение(2.1) можно представить как
Mвр = I dΨ/dα. (2.5)
Полное изменение потокосцепления с рамкой через конструк- тивные параметры рамки запишется следующим образом:
dΨ = B S w dα,
где В – индукция в зазоре; S – площадь рамки; w – число витков рамки.
Если положить dα = 1 рад, то произведение BSw – величина постоянная для каждого данного прибора и равная изменению
потокосцепления при повороте рамки на 1 рад. Обозначая его через Ψ0 запишем:
Ψ0 = BSw.
Тогда:
dΨ0 = Ψ0 dα. (2.6)
Подставляя выражение (2.6) в формулу (2.5), получим выра- жение вращающего момента для магнитоэлектрического меха- низма в следующемвиде:
Мвр = IΨ0. (2.7)
Установившееся положение подвижной части ИМ наступает при равенстве вращающего и противодействующего моментов Мвр = Мпр, т.е. с учетом формулы (2.2) запишем:
I Ψ0 = W α.
Следовательно, уравнение преобразования для магнитоэлек- трического ИМ будет иметь вид:
α = IΨ0 /W, или α =SI I, (2.8)
где SI – чувствительность измерительного механизма по току, рад/А, SI=Ψ0 /W.
Также можно записать формулу (2.8) через конструктивные параметры измерительного механизма:
α = BSw I/W. (2.9)
Из формулы (2.9) следует, что угол отклонения подвижной части ИМ прямо пропорционален току в катушке, поэтому маг- нитоэлектрические приборы имеют равномерные шкалы.
В магнитоэлектрических приборах успокоение подвижной ча- сти приборов магнитоиндукционное, т.е. создается взаимодей- ствием магнитных полей от вихревых токов в каркасе катушки и поля постоянного магнита.
Д о с т о и н с т в а : высокий класс точности – 0,05 и ниже, рав- номерная шкала, высокая и стабильная чувствительность, малое собственное потребление мощности, большой диапазон измере-
ний, на показания МЭП не влияют внешние магнитные и элек- трические поля.
Н е д о с т а т к и : без преобразователей МЭП используют толь- ко в цепях постоянного тока, имеют малую нагрузочную способ- ность, сложны и дороги, на их показания влияют колебания тем- пературы.
П р и м е н е н и е : магнитоэлектрические ИМ используют в амперметрах, вольтметрах, омметрах и гальванометрах (обыч- ных, баллистических и вибрационных).
Амперметры. Магнитоэлектрический измерительный меха- низм, включенный в электрическую цепь последовательно с нагрузкой, позволяет измерять токи порядка 20...50 мА. Для рас- ширения пределов измерения используют шунты (манганиновый резистор), сопротивление которых мало зависит от температуры. Сопротивление шунта Rш меньше сопротивления прибора Rпр и выбирается из соотношения:
Rш = Rпр /(n - 1), (2.10)
где n – коэффициент шунтирования по току, n=I/Iпр.
Вольтметры. Магнитоэлектрический измерительный меха- низм, включенный параллельно нагрузке. Для расширения преде- лов измерения по напряжению последовательно с ИМ включают добавочный резистор Rдоб,сопротивление которогобольше со- противления Rпp:
Rдоб = Rпр /(m - 1), (2.11)
где m –коэффициент шунтирования по напряжению, m=U/Uпр.
Логометры. Приборы электромеханической группы, измеря- ющие отношение двух электрических величин, обычно двух то- ков α=f(I1/I2), что позволяет сделать их показания независимыми в известных пределах от напряжения источника питания. В лого- метрах вращающий и противодействующий моменты создаются
электрическим путем и направлены навстречу друг другу. На рис.2.3 приведена схема устройства магнитоэлектрического ло- гометра.
В поле постоянного магнита помешена подвижная часть, со- стоящая из двух жестко закрепленных под определенным углом рамок. Особой формой полюсных наконечников и сердечника, находящегося между ними, искусственно создается неравномер- ное магнитное поле постоянного магнита. Токи к рамкам подво- дятся через безмоментные токоподводы, не создающие противо- действующего момента.
Направления токов в рамках логометра выбираются так, что- бы моменты Мвр, и Мпр были направлены в разныестороны. Тогда в общем виде можно записать
Мвр = I1 f1(α); Мпр = I2 f2(α), (2.12)
где I1 и I2 – токи в рамках; α – угол отклонения подвижной части от некоторого условного нулевого положения.






 3
3
N S
Рис. 2.3. Схема устройства магнитоэлектрического логометра
Равновесие подвижной части наступает при равенстве момен- тов Мвр и Мпр, действующих на рамку, т.е. при условии I1f1(α) = I2 f2(α).
Откуда:
I1/ I2 = f2(α) / f1(α) = f(α)
или:
α = F (I1/ I2). (2.13)
 r2 r1
r2 r1
r2 r1
E E
r0 rx
r0 r3
 а б
а б
Рис. 2.4. Схемы устройства магнитоэлектрических омметров с логометрическим механизмом для измерения больших (а)
и малых (б) сопротивлений
Омметры. Магнитоэлектрические логометры широко приме- няются в приборах для измерения сопротивления – омметрах и мегоомметрах, в выпрямительных частотомерах и устройствах для измерения неэлектрических величин (температуры, давления, уровняжидкости и др.).
На рис. 2.4 приведены схемы магнитоэлектрических оммет- ров с последовательным (рис. 2.4, а) и с параллельным (рис. 2.4, б) включением измеряемого сопротивления. Последовательное включение применяется при измерении средних и больших со- противлений, параллельное – при измерении малых сопротив- лений.
При последовательном включении (см. рис. 2.4, а) токи в ка- тушках:
I1 = E/(r1+r0); I2 = E/(r2+rx),
где E – напряжение питания; r1 и r2 – сопротивления обмоток ра- мок; r0, r3 – известные сопротивления; rx – неизвестное сопротив- ление.
Тогда согласно выражению (2.13) уравнение преобразования запишется в виде:
α = F[(r2+rx) / (r1+r0)]. (2.14)
Из формулы (2.14) видно, что независимо от величины напря- жения питания Е и при постоянных r1 r2 и r0 отклонение подвиж- ной части является однозначной функцией rx и шкала прибора может быть проградуирована в единицах сопротивления.
В приборах с параллельным включением (см. рис. 2.4, б) при постоянном напряжении питания Е ток I1 не зависит, а ток I2 за- висит от rx. Отношение токов, а следовательно, и угол α не зави- сят от напряжения питания и являются однозначной функцией rx, т.е. и здесь шкала может быть проградуирована в омах. Обе схемы обычно объединяют в одном приборе – омметре, переход от одной схемы к другой осуществляется с помощью переклю- чателя.
Логометрические омметры – приборы невысокого класса точ- ности (1,5; 2,5; 4,0). Погрешность омметра указывается в процен- тах от длины рабочей шкалы.
Аналогично рассмотренному принципу построения логомет- рического ИМ магнитоэлектрической системы выпускают лого- метры электромагнитной, электродинамической, ферродинами- ческой и индукционной систем.
Гальванометры постоянного тока. На рис. 2.5 показана схе- ма устройства магнитоэлектрического гальванометра постоянно- го тока.
Сильный постоянный магнит 2 из высококоэрпетивного спла- ва, полюсные наконечники 5 из магнитомягкой стали с цилин- дрической расточкой концов и неподвижный стальной цилиндр 7, укрепленный в расточке, служат для создания в зазоре сильного равномерного магнитного поля. В этом зазоре находится рамка 4, укрепленная на подвесе 1, к которой через безмоментные токо-
подводы 6 подводится ток. На оси рамки закреплено зеркальце 3 для оптического отсчета угла отклонения рамки от нулевого по- ложения.
 1
1
2
3
4
5
7
6 6
Рис. 2.5. Схема устройства магнитоэлектрического гальванометра:
1 – подвес; 2 – постоянный магнит; 3 – зеркальце; 4 – рамка; 5 – полюсные наконечники; 6 – безмоментные токопроводы; 7 – стальной цилиндр
На рамку при подаче тока I действуют моменты: вращающий Мвр, вычисляемый по формуле (2.1), противодействующий Мпр, создаваемый при закручивании подвеса и вычисляемый по фор- муле (2.2), и успокоения Мусп, вычисляемый по формуле (2.3).
Величина Р = Ψ0 /(Rг + Rвн) называется коэффициентом успо- коения и определяется конструктивными параметрами гальвано- метра – Ψ0, Rг и сопротивлением внешней цепи Rвн. Изменяя Rвн , можно изменять коэффициент успокоения.
Известно, что движение вращающегося тела определяется уравнением:
2
![]() J
d
dt
2
J
d
dt
2
M ,
где J – момент инерции тела; d2α /dt2 – угловое ускорение; M – сумма вращающих моментов, действующих на тело.
Для гальванометра это уравнение имеет вид:
d 2
![]() J
dt
2
J
dt
2
Mвр Мпр М усп . (2.15)
Подставляя в выражение (2.15) значения моментов с учетом их знака, получим дифференциальное уравнение движения по- движной рамки гальванометра:
2
J d P dWI.
(2.16)
![]()
![]() dt
2 dt 0
dt
2 dt 0
Интеграл этого дифференциального уравнения второго поряд- ка с постоянными коэффициентами и с правой частью, как из- вестно, состоит из двух членов: αс – частного решения при задан- ных условиях, и α0 – общего решения данного уравнения без пра- вой части, т.е.
α = αс + α0. (2.17)
Частное решение уравнения (2.16), рассмотренное для случая установившегося равновесия подвижной части гальванометра с учетом (2.17), будет иметь вид:
αс = S1 I. (2.18)
Для получения общего решения уравнения (2.16) запишем его в виде:
2
![]()
![]() J
d
P
dW0.
J
d
P
dW0.
(2.19)
dt 2 dt
Для уравнения (2.19) решением будет функция:
0 C1ex1t C2ex2t , (2.20)
где С1 и С2 – постоянные интегрирования, получаемые из началь- ных условий; х1 и х2 – корни характеристического уравнения, за- писанного в виде:
Jx2 Px W 0 . (2.21)
Определив значения корней х1 и х2 и подставив их в уравнение (2.19), а найденное значение α0 в уравнение (2.17), получим урав- нение движения подвижной части гальванометра:
f ( t ) . (2.22)
Величина критического сопротивления Rкр определяет воз- можность применения гальванометра, и его всегда указывают на шкале прибора.
К метрологическим характеристикам ИП относятся: чувстви- тельность, период собственных колебаний, внешнее и полное критические сопротивления.
П р и м е н е н и е : гальванометры используют для измерения малых токов (10-5... 10-12 А) и напряжений (до 10-4 В) в качестве нуль-индикаторов.