

Разновидности измерительных информационных систем
Измерительные информационные системы, предназначенные для измерения и хранения информации, называются измеритель- ными системами (ИС).
Измерительные системы могут быть ближнего или дальнего действия. На вход системы поступает множество изменяющих во времени и (или) распределенных в пространстве величин. Упро- щеннаяклассификация измерительных систем представлена на рис. 6.4.
 Измерительные
системы
Измерительные
системы
Прямые
Косвенные
Совместные
Совокупные
Параллельные
Последовательные
(сканирование)
Параллельно-
последвательные
Мультиплицированные
По
методам
сбора
и
обработки
информации
![]()
![]()
![]()
![]()
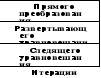
Рис. 6.4. Упрощенная классификация измерительных систем
Наиболее распространены системы для прямых измерений.
Обобщенная структура ИС представлена на рис. 6.5.

![]() Д С В
Д
Д С В
Д
![]()
Рис. 6.5. Обобщенная структура измерительной системы для прямых измерений
Для всех ИС основными элементами являются первичные преобразователи {Д}, элементы сравнения {С}, меры {М} и эле- менты отображения информации {В}. Для совместных и сово-
купных измерений часто используются многомерные и аппрок- симирующие системы.
Характеристики измерительных систем. Важнейшими ха- рактеристиками ИС являются эффективность, полнота выполня- емых функций, достоверность, надежность, быстродействие, характеристики входов и выходов, метрологические характери- стики.
Эффективность. Под эффективностью понимается улуч- шение работы объекта при использовании системы. Ограничим- ся рассмотрением экономической эффективности систем, пред- ставляющих наибольший интерес для народного хозяйства. Приращение экономической эффективности можно выразить формулой
Э = Э1 + Э2,
гдеЭ1 – экономический эффект от объекта в заданный промежуток времени без ИС; Э2 – экономический эффект от объекта в тот же заданный промежуток времени с применением ИС.
Экономический эффект целесообразно рассчитывать по обще- признанному критерию полных затрат.
Для сравнения различных измерительных систем удобнее ис- пользовать нормированный показатель эффективности, называе- мый коэффициентом эффективности:
![]() Э2
Э1
,
Э2
Э1
,
Эn Э1
где Эn – экономический эффект от объекта при использовании идеальной измерительной системы, выполняющей идеально все функции и при отсутствии на это затрат.
Коэффициент эффективности изменяется в пределах 0 < n < 1, который определяется и уточняется на нескольких этапах проек- тирования и эксплуатации системы.
На этапах проектирования (ТЭО, ТЗ, ТП, РД) производится предварительная оценка по ожидаемым данным, которая уточня- ется послеввода ИИС в эксплуатацию.
Полнота (глубина) выполняемых функций. Она показывает, какая часть контролируемого или управляемого объекта охвачена измерительной системой.
Коэффициент, характеризующий полноту:
P=Nb/N,
где N – общее число параметров объекта (например, контроля, измерения, управления); Nb – число параметров объекта, охвачен- ных ИС.
Достоверность. Достоверность относится к обобщенным ха- рактеристикам. Требования, предъявляемые к этому показателю, являются исходными для обоснования частных характеристик системы. Наиболее существенные факторы достоверности – точ- ность измерения контролируемых параметров, глубина контроля, надежность и помехоустойчивость работы всех устройств. С уменьшением достоверности возрастает вероятность неработо- способного состояния объекта контроля, измерения, управления при информации в системе в пределах допусков. Характерный пример низкой достоверности – работа с низкой помехоустойчи- востью в условиях помех. Аналогичная ситуация возникает при неудовлетворительной надежности системы и при недопустимо малой точности измерений.
Надежность. Критерий надежности и его числовые характе- ристики выбираются с учетом особенностей назначения ИС и характера решаемых задач.
К основным критериям надежности систем относятся:
![]()
средняянаработка на отказ t ;
![]()
среднее время восстановления t в;
![]()
средняянаработка до отказа t 0;
интенсивность отказов λ;
вероятность безотказной работы системы P(t) в течение за- данного времени t (вероятность восстановления F(tB));
вероятность завершения проверки объекта или группы объ-
ектов (вероятность восстановления) F(tB) в течение заданного времени;
коэффициент готовностисистемы Kr.
Для стационарных измерительных систем в народном хозяй-
![]()
![]()
стве широко используют критерии t 0, t в и частично Kr.
С целью уменьшения влияния ненадежности на работоспо- собность системы используют два основных метода самоконтроля в измерительной системе: программный и схемный аппараты.
Программный метод основан на использовании заранее отра- ботанных испытанных программ (тестов). Такой самоконтроль в основном позволяет проверить устройства системы, производя- щие обработку информации.
Схемный метод (самоконтроль) требует дополнительного оборудования (аппаратуры) для проверки системы. Одной из раз- новидностей схемного самоконтроля является применение кодов с обнаружением и исправлением ошибок. Методы самоконтроля требуют временной информационной или аппаратурной избы- точности.
Быстродействие. Быстродействие характеризуется средним временем выполнения операций (измерения, контроля, управле- ния, диагностики, поиска и т.п.). Для циклических систем быст- родействие характеризуется временем цикла tвосп. Во многих слу- чаях при определении быстродействия необходимо учитывать среднее время выполнения вспомогательных операций tBосп, к ко- торым относится включение источников питания разогрева аппа-
ратуры, подключение кабелей и т.п. В таких случаях быстро- действие, например системы измерения, определяется выражени- ем:
tr=tвосп+tосн+tон,
где tосн – среднее время самого контроля и поиска неисправно- стей, tон – среднее время считывания или записи и анализа ре- зультатов.
Быстродействие в ряде случаев удобно характеризовать ин- формационным критерием – количеством информации, перераба- тываемой в единицу времени. Для систем контроля и измерения быстродействие:
x
( H0i Hi ) B1 i 1 ,
tk 0 tn0 H 0
где H0i – энтропия i-го параметра до начала контроля; Hi – эн- тропия i-го параметра после контроля; tk0 – время измерения
определяющих параметров;
стей.
tn0 H 0
время поиска неисправно-
В расчетах используется критерий Шеннона, учитывающий количество информации и возможности ее статистического коди- рования. Однако при расчете быстродействия во многих случаях целесообразно использоватькритерий Хартли, учитывающий только физические возможности системы. Тогда быстродействие эквивалентной информационной емкости определяется по фор- муле:
B2
x
log m
i 1 ,
tk 0 tn0H0
где m – число различныхсостояний, например число уровней квантования в дискретной системе.
Характеристики входов и выходов системы. Они включают в себя перечень и данные входов системы, а также характеристи- ки устройств отображения информации. К последним относятся данные диспетчерского щита и пульта, данные дисплеев и других средств отображения информации.
Характеристики технических средств. Эти характеристики включают в себя данные элементной базы (типы и серии микро- схем и других элементов), типы готовых блоков, устройств и вспомогательного оборудования, включая источник питания, а также условия эксплуатации системы.
Многоканальный ИС параллельного действия. Это один из наиболее распространенных видов ИИС, обладающих наиболее высокой надежностью, более высоким быстродействием при од- новременном получении информации, возможностью подбора средств измерений к замеряемым величинам, что может исклю- чить унификацию сигналов. Однако они имеют повышенные сложность и стоимость (рис. 6.6).
Д1
![]()
![]()
![]()
![]()
![]() B1
B1
![]()
![]()
![]()
![]() М1
М1
![]()
![]()
Дn
![]()
![]()
![]()
![]()
![]() Bn
Bn
Мn
Рис. 6.6. Структурная схема многоканальной измерительной системы
Мультиплицированные (с общей образцовой величиной) ИС (рис.6.7). Системы предложены Ф.Е. Темниковым. Их еще называют системами с развертывающим уравновешиванием. Си- стемы имеют меньшее число элементов, чем параллельные ИС, но несколько меньшее быстродействие. В этих системах измери-
тельная величина сравнивается с линейно изменяющейся величи- ной. При фиксированных моментах начала развертки и равенстве х и хк может быть определен интервал времени tx, пропорцио- нальный значению хк..
В многоканальной системе возникают трудности в разделении сигналов от элементов сравнения. В этом случае прибегают к специальным мерам.
Сканирующие (последовательного действия) ИС. С помо- щью одного канала они выполняют последовательно измерения множества величин и имеют сканирующее устройство (СкУ), ко- торое перемещает датчик в пространстве (рис. 6.8).
 Д1 B1
Д1 B1
Дn Bn
![]() В
В
Д
![]()
![]()
![]()
![]()
![]() СкУ М
СкУ М
М
Рис. 6.7. Структурная схема Рис. 6.8. Структурная схема сканирующей мультиплицированной измерительной системы измерительной системы
При пассивном сканировании траектория движения может быть запрограммирована, при активном сканировании может изменяться в зависимости от получаемой измерительной ин- формации.
Сканирующие системы применяются для измерения темпера- турных полей, нахождения экстремальных значений исследуемых полей (давлений, механических напряжений и т.д.) или нахожде- ния одинаковых значений параметра. Недостаток систем – малое быстродействие.