

Погрешности магнитоупругих преобразователей
Погрешность из-за нелинейности функции преобразователя. Функция преобразования магнитоупругих преобразователей, как правило, нелинейна. Имеется ряд методов уменьшения этой нелинейности. Нелинейность уменьшается при сокращении диа- пазона измеряемой силы, при соответствующем выборе магнит- ного режима преобразователя и т.д. Применение соответствую- щих мер позволяет уменьшить погрешность из-за нелинейности
функции преобразования до 1,5...2%.
Магнитоупругая погрешность. Это погрешность невоспро- изводимости магнитного состояния сердечника преобразователя при нагрузке и разгрузке. Ее возникновение обусловлено магни- тоупругим гистерезисом. Магнитоупругая погрешность γм уменьшается с увеличением напряженности магнитного поля в сердечнике. Для получения возможно меньшей магнитоупругой погрешности сердечник следует изготовлять из ферромагнитных материалов с узкой петлей магнитного гистерезисного цикла и высоким пределом упругости.
Погрешность от колебания напряжения. При изменении намагничивающего тока меняется как начальное значение маг- нитной проницаемости, так и величина магнитоупругого эффек- та. Поэтому стабилизация напряжения питания необходима всех
типов датчиков. Иначе погрешность от колебания напряжения источника питания будетнедопустимо большой.
Температурная погрешность. Колебания температуры пре- образователя вызывают: изменение сопротивления R катушки постоянному току, изменение начальной магнитной проницаемо- сти и изменение магнитострикции, а следовательно, и магнито- упругого эффекта. Все эти изменения создают температурную погрешность. Но изменение активного сопротивления R мало сказывается на работе преобразователя, так как активное сопро- тивление значительно меньше полного сопротивления преобра- зователя.
Изменение магнитной проницаемости может иметь положи- тельный и отрицательный знак в зависимости от материала пре- образователя ирабочегозначения напряженности поля. Таким образом, в зависимости от выбранного материала сердечника и рабочего значения напряженности поля отдельные факторы при колебаниях температуры могут компенсировать друг друга в из- вестных пределах. В случае необходимости температурную по- грешность можно скорректировать при помощи включения в со- седнее плечо моста корректирующего преобразователя, идентич- ного с рабочим и находящегося в тех же температурных услови- ях, но не подвергающегося нагрузке.
Применение магнитоупругих преобразователей
Магнитоупругие преобразователи используются:
для измерения больших давлений (больше10 Н/мм2, или 100 кг/см2), так как они непосредственно воспринимают давление и не нуждаются в дополнительных преобразователях;
измерения силы, так как эти преобразователи деформиру- ются под действием силы очень незначительно. Например, при l = 50 мм, ∆l<10 мкм они имеют высокую жесткость и собствен-
ную частоту до 20...50 кГц. В этом случае предел измерения при- бора определяется площадью магнитоупругого преобразователя. Допустимые напряжения в материале магнитоупругого преобра- зователя не должны превышать 40 Н/мм. Рассмотрим принцип использования магнитоупругих преобразователей для измерения различных неэлектрических величин.
Измерение крутящего момента. В качестве примера исполь- зования магнитоупругих преобразователей на рис. 4.56 приведена конструкция датчика магнитоупругого торсиометра, применяе- мого для измерения крутящего момента на буровом инструменте. Магнитоупругим элементом является участок рабочего вала 2, выполненного из ферромагнитного материала. Этот участок вала охвачен кольцевым статором 1. Статор имеет внутренние ради- ально расположенные выступы (полюсы)4 из листовой транс- форматорной стали, на которые намотаны намагничивающие ка- тушки 6, питаемые переменным током.
 ~
~
1
2
3
4
5
6
Рис. 4.56. Устройство датчика магнитоупругого торсиометра:
1 – статор; 2 – рабочий вал; 3 – измерительные катушки; 4 – полюсы; 5 – сердечник; б – намагничивающие катушки
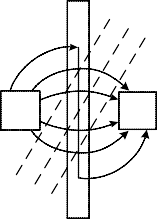
Катушки соединены последовательно так, чтобы полюса чере- довались. При отсутствии крутящего момента направление маг-
нитного потока между полюсами перпендикулярно образующей вала (линия2–2 на рис. 4.57).
0,4
 0,5
0,5
2
0,6
2
µ1>µ
 µ2>µ
µ2>µ
1 I 1 I
0,4
2
0,5
0,6
0,4
0,5
0,6 2
Рис. 4.57. Картина поля между полюсами 1–1, 2–2 намагничивающих катушек
Измерительные катушки 3 преобразователя (см. рис. 4.56) имеют сердечник 5 П-образной формы из трансформаторной ста- ли. Их оси расположены вдоль образующей вала. Катушки со- единены последовательно. При отсутствии крутящего момента концы сердечника 5 расположены на одной и той же относитель- ной магнитной эквипотенциальной линии 0,5 и, следовательно, разности магнитного потенциала между ними нет.
При действии крутящего момента изменится магнитная прони- цаемость μ материала вала, причем в направлениях, в которых вал испытывает деформацию сжатия, μ будет уменьшаться, а в направ- лениях деформации растяжения –увеличиваться.
Вследствие возникшей магнитнойанизотропииизменится картина поля между полюсами намагничивающих катушек, т.е. полюса 2–2 сердечника измерительной катушки уже не будут находиться на одной эквипотенциальной линии, и через сердеч- ник пойдет часть магнитного потока. При изменении знака мо- мента картина поля изменится на обратную и на 180º изменится
фаза потока, а следовательно, и фаза выходного напряжения, ин- дуцированного в катушке.
Магнитоупругий динамометр. Этот прибор предназначен для измерения сосредоточенных сил. На рис. 4.58 представлена измерительная цепь магнитоупругого динамометра, где Zx – со- противление рабочего преобразователя, a ZN – сопротивление не- нагруженного (нерабочего) преобразователя. В исходном состоя- нии (ZX = ZN) измерительная цепь уравновешена и ток, протека- ющий через указатель, равен нулю. При Zx ≠ ZN через указатель протекает ток. Шкала указателя может быть проградуирована в единицах измеряемой силы.
 R TV
R TV
ZN
Ук
Zx
Рис. 4.58. Измерительная цепь магнитоупругого динамометра
Частота собственных колебаний преобразователя достигает нескольких десятков тысяч герц, что дает возможность при соот- ветствующем выборе частоты источника питания измерять дина- мические силы до частот порядка 10 кГц.