

Глава 3. Общие сведения об измерении неэлектрических величин
Основные характеристики измерительных преобразователей
Внедрение механизации и комплексной автоматизации в про- изводство требует быстрого и точного контроля технологических процессов, что связано с измерением и контролем самых разно- образных параметров физических величин. Особенно большое число различных неэлектрических величин требуется измерять и контролировать в металлургической, химической и текстильной промышленностях. Развитие измерительной техники показало, что среди разнообразных методов измерения неэлектрических величин наибольшими преимуществами обладают электрические методы, которые обеспечивают:
возможность измерения сигналов очень малой величины – применение электронных усилителей позволяет измерять такие сигналы, которые не могут быть измерены никакими другими способами;
возможность передачи измеренной величины на расстояние, а следовательно, и возможность дистанционного управления раз- личными процессами;
высокую точность искорость измерений;
возможность комплектования измерительных и управляемых ими автоматических установок унифицированными электроизме- рительными приборами.
Для измерения любой неэлектрической величины Х (темпера- туры, давления, расхода жидкости, скорости, перемещения, уско- рения, деформации, вибрации и т.д.) ее преобразовывают с по- мощью первичного измерительного преобразователя, или датчи-
ка, в выходную электрическую величину Y. Далее сигнал Y пре- образуется цепью измерительных преобразователей прибора, где он претерпевает ряд изменений по уровню и спектру и пре- образуется из одного вида энергии вдругой. Таким образом, прибор для измерения неэлектрических величин в общем можно представить в виде цепи измерительных преобразователей, по- следовательно преобразующих измеряемую величину Х в ряд других величин и в конечном счете – в число (код), определяю- щее значение измеряемой величины в определенных единицах измерения.
Измерительный преобразователь – техническое средство с нормативными метрологическими характеристиками, служащее дляпреобразованияизмеряемой величины в другую величину, или измерительный сигнал,удобныйдляобработки,хранения, дальнейшихпреобразований, индикации илипередачи. Учиты- вая, что объект измерения, как правило, сложный процесс, харак- теризующийся множеством различных параметров, будем счи- тать информативным параметром входного сигнала непосред- ственно меряемую величину или величину, функционально свя- занную с измеряемой величиной. Неинформативный параметр не связан функционально с измеряемой величиной, но влияет на метрологические характеристики преобразователя.
Параметры, характеризующие условия, в которых работает преобразователь, и влияющие на его функцию преобразования, называют влияющими величинами. Зависимость изменения мет- рологических характеристик преобразователя от изменения вли- яющей величины или неинформативного параметра входного сигнала в пределах рабочих условий эксплуатации называется функцией влияния. Функция влияния может быть нормирована в виде формулы, графика или таблицы.
Функция преобразования. Связь, выражающая зависимость информативного параметра выходного сигнала от постоянного во времени информативного параметра входного сигнала, называет- ся статической характеристикой (функцией) преобразования. Ее можно описать аналитическим выражением или графиком. В аналитическом виде характеристика преобразования представ- ляется зависимостью Y=f(X), которая может быть линейной (рис. 3.1, а) или нелинейной (рис. 3.1, б, в). Различают номиналь- ную функцию преобразования Yном= fном(X), приписываемую из- мерительному преобразователю согласно государственным стан- дартам, техническим условиям и другим нормативным докумен- там, и реальную (рабочую) Yр=fр(X), которую он имеет в действи- тельности.
Динамические характеристики преобразователей представля- ют собой зависимость информативного параметра выходного сиг- нала от меняющихся вовремени параметров входного сигнала.


 Y Y Y
Y Y Y
X X X


 Y Y Y
Y Y Y
X X X
а б в
Рис. 3.1. Функции преобразования: а – линейная; б, в – нелинейные
К числу динамических относятся характеристики: импульсная
g(t), являющаяся реакцией преобразователя на дельта-функцию
δ(t); переходная h(t) – реакция на единичный ступенчатый сигнал; передаточная функция, являющаяся отношением операторных изображений выходной величины к входной К(р) = Y(p)/X(p); ам- плитудно- и фазочастотная. Динамические (инерционные) свой- ства преобразователей характеризуют такими понятиями, как скорость преобразования и время преобразования. Скорость пре- образования (измерения) определяется числом преобразований (измерений) в единицу времени, выполняемых с нормированной погрешностью. Время преобразования (измерения) определяется временем, прошедшим с начала преобразования (измерения) до получения результата с нормированной погрешностью.
Чувствительность. Чувствительностью преобразователя называют отношение изменения выходной величины (информа- тивного параметра) к вызывающему его изменению входной ве- личины (информативного параметра входного сигнала). Чувстви- тельность равна производной от функции преобразования преоб- разователя S=dY/dX=∆Y/∆AX и геометрически выражается тан- генсом угла наклона касательной в любой точке кривой функции преобразования.
Для линейных преобразователей чувствительность постоянна и может быть определена как
S=Y/X, (3.1)
а для нелинейных – чувствительность всегда зависит от входного сигнала.
Погрешность. Абсолютные, относительные и приведенные погрешности преобразователя определяются по входу и выходу, поскольку входная и выходная величины могут иметь разную физическую природу, а также часто отсутствует измерительный преобразователь, по которому можно было бы поверить рабочий преобразователь. Смысл определения погрешностей по входу и выходу поясняется на рис. 3.2, а. Разность значений реальной и
номинальной функций преобразования при одном и том же зна- чении входной величины X определяет абсолютную погрешность преобразователя по выходу
∆y=Yp –Yном. (3.2)


 Y Y Y
Y Y Y



 FP
Fном
FP
Fном
 YP
YP
Yном





 Y0
Y0







 Y0ном
Y0ном
а 0 XД. ΔX Xном X б 0
X в 0 X
Рис. 3.2. Погрешности по входу и выходу: а – аддитивная; б, в – мультипликативные
Погрешность создается самим преобразователем, поэтому це- лесообразно знать значение входного сигнала, соответствующего погрешности преобразователя. Абсолютной погрешностью пре- образователя по входу называется разность:
X X НОМ Х Д , (3.3)
где X – действительное значение входной величины; Хном – значе- ние входной величины, определяемое по номинальной функции преобразования Yном=fном(Х) при значении выходной величины Yном, соответствующей действительному значению ХД.
Относительные погрешности по выходу и входу определяют- ся соответственно равенствами:
вых Y / Yр
и вх Х / Х Д .
Приведенные погрешности по выходу и входу определяются соответственно:
прив.вых Y /( Ymax Ymin ) и прив.вх X /( Xmax Xmin ),
где Xmax, Ymax, Xmin, Ymin – максимальные и минимальные значения входной и выходной величин преобразователя.
Погрешности преобразования зависят как от свойств самого преобразователя, так и от условий, в которых он работает (темпе- ратуры и влажности окружающей среды, наличия внешних элек- трических и магнитных полей и т.д.). При нормировании точно- сти измерительных преобразователей обычно указывают область допустимых значений погрешностей преобразования, реализуе- мого преобразователем при нормальных условиях (основная по- грешность),и допустимые изменения функции преобразования при определенных изменениях влияющих величин.
На практике часто используются преобразователи с линейной функцией преобразования, не проходящей через начало коорди- нат (рис. 3.2, б),
Yp SX / Y0 ,
где Y0 ном – значение выходной величины при нулевом значении входной.
Отклонение такой реальной функции от номинальной вызвано отклонением Y0 и отклонением чувствительности S. Погреш- ность, обусловленная неноминальным значением выходной вели- чины при нулевом значении входной, называется аддитивной:
адд Y0 Y0 Y0ном , (3.5)
где Y0 ном – номинальное значение выходной величины при нуле- вом значении входной.
Очевидно, что при изменении Y0 график функции преобразо- вания перемещается параллельно самому себе, т.е. аддитивная погрешность не зависит от входной величины.
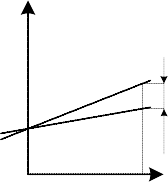
Погрешность, обусловленная неноминальным значением чув- ствительности S, называется мультипликативной. Погрешность чувствительности, представляющая собой мультипликативную составляющую основной погрешности, приводит к изменению угла наклона реальной характеристики преобразователя относи-
тельно номинальной (рис. 3.2, в). При этом абсолютная мульти- пликативная погрешность ∆м=Y-Yном зависит от входной величи- ны X. Например, при изменении температурных условий работы преобразователя его чувствительность изменилась на ∆S и стала равной Sном + ∆S, где Sном – номинальное значение чувствитель- ности преобразователя. Абсолютная мультипликативная погреш- ность чувствительности преобразователя в этом случае
M Sном S X Y0 SномX Y0 SX,
(3.6)
т.е. абсолютная мультипликативная погрешность пропорцио- нальна входной величине X.