

ВН
.pdf1 Основные навигационные понятия и определения
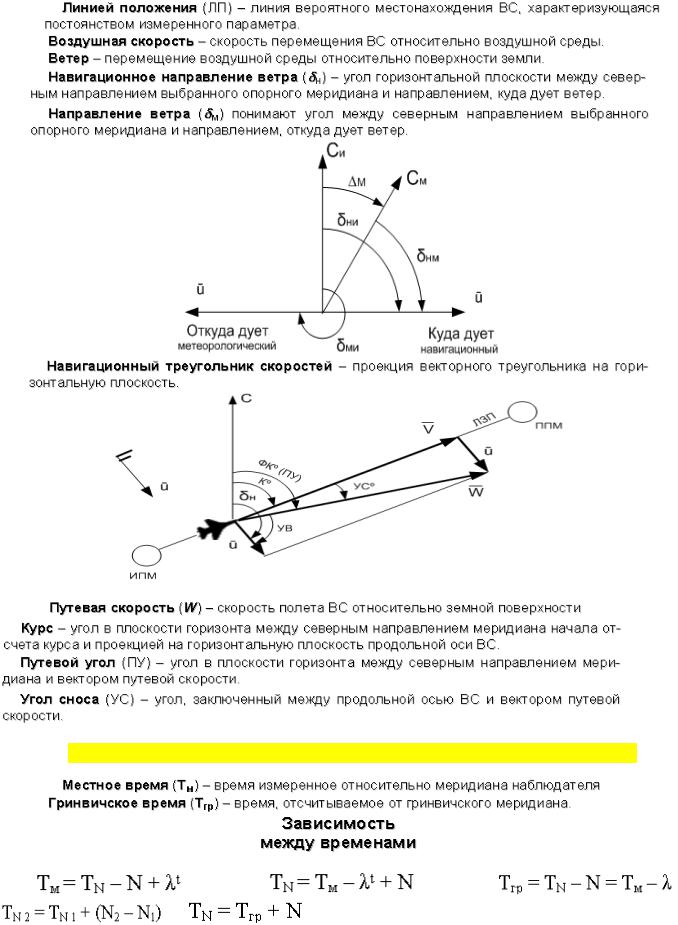
2 Гринвичское, местное, поясное, декретное время и зависимость между ними

3 Организация проверки времени в авиационных частях МЧС
4 Высота полета, классификация высот
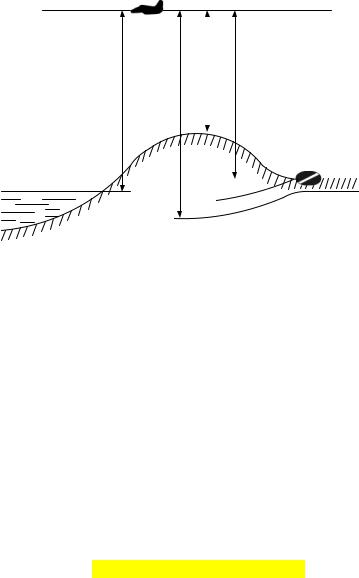
Высотой полета (Н) называется расстояние до самолета, отсчитанное по вертикали от некоторого уровня, принятого за начало отсчета.
В зависимости от уровня отсчета различают истинную, абсолютную, относительную высоту и высоту эшелона (рис. 3.1.).
Истинная высота (Н ист) отсчитывается от уровня местности, над которой пролетает самолет.
Абсолютная высота (Н абс) отсчитывается от уровня моря.
Относительная высота (Н отн) полета отсчитывается от некоторого условного уровня, например, от уровня аэродрома.
Уровень Балтийского моря
Набс |
Нэш |
|
Нист |
Нотн |
|
||||
|
|
|
|
|
Аэродром взлета
|
|
|
|
мм |
|
|
|
|
0 |
|
|
|
|
5 |
|
|
|
|
7 |
|
|
|
|
= |
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
м |
|
|
=760 |
|
|||
Р |
|
|
|
|
|
Высота эшелона (Н эш) - это высота полета самолета, измеренная относительно изобарической поверхности с атмосферным давлением 760 мм рт.ст.
Кроме того, в соответствии со ст. 20 п. 7 ФП ИВП, высоты подразделяются на:
предельно малые – до 200 м включительно;
малые – от 200 до 1000 м включительно;
средние – от 1000 до 4000 м включительно;
большие – от 4000 до 12000 м (до тропопаузы);
стратосферные – выше 12000 м (выше тропопаузы).
При этом все указанные высоты измеряются от рельефа местности (Н ист).
5 Методы измерения высоты Радиотехнический метод измерения высоты
Радиотехническим методом высота измеряется с помощью радиовысотомеров. Радиовысотомеры предназначены для измерения истинной высоты полета. Принцип действия их основан на измерении времени ( ) прохождения радиоволн от самолета до земли и обратно.
Взависимости от диапазона измерения высот радиовысотомеры работают в импульсном и непрерывном режиме излучения. Для измерения больших высот используется импульсный режим
ивремя измеряется между моментом излучения передатчика и моментом приема отраженного от земли импульса приемником.
Врадиовысотомерах малых высот используется непрерывный режим излучения. При этом время измеряется по разности частоты, излучаемой в данный момент передатчиком, и частоты отраженного сигнала. При постоянной скорости распространения радиоволн (с) Н ист. будет равна.
Радиовысотомеры малых высот кроме визуальной индикации Н ист. обеспечивают световую и звуковую сигнализацию при снижении самолета ниже уровня, заданного летчиком.

Барометрический метод измерения высоты
Между высотой полета (Н) и атмосферным давлением воздуха на этой высоте (Р н) существует закономерная связь, которая математически выражается следующим выражением:
P o |
|
Н = R T ср l n ───── |
(3.2) |
P н |
|
T о + T н |
|
T ср = ───── |
(3.3) |
2 |
|
где Т о, Р о – температура и давление воздуха на уровне, принятом за начало отсчета высоты (по шкале Кельвина);
R = 29,27 м/град – газовая постоянная;
Р н – давление на высоте полета.
Из данных соотношений видно, что для определения высоты полета барометрическим методом необходимо знать температуру и давление воздуха на уровне, принятом за начало отсчета (Ро, Тср), давление воздуха на высоте полета (Рн). Приборы, которые решают эту задачу, называются барометрическими высотомерами, т.е. они измеряют высоту полета относительно изобарической поверхности, давление которой устанавливается на высотомере. Барометрический высотомер измеряет только давление воздуха на высоте полета (Рн) с помощью анероидных коробок. Остальные величины или принимаются равными условиям стандартной атмосферы (Т о), или устанавливаются вручную (Ро – для некоторого уровня). В результате этого возникают методические ошибки замера высоты. Кроме методических ошибок высотомеру присущи аэродинамические и инструментальные погрешности.
6 Ошибки барометрического высотомера и их учет
Ошибкой (погрешностью) барометрического высотомера называют разность между показаниями прибора и истинным значением высоты. Однако в самолетовождении при расчете Н пользуются не ошибками, а поправками. Поправки - это величины, которые алгебраически должны быть прибавлены к показаниям прибора для получения истинного значения высоты.
От ошибки поправка отличается только знаком.
7 Порядок расчета истинной и приборной высоты
Обычно летчику задается истинная высота полета (Н ист), чтобы ее выдержать по барометрическому высотомеру, необходимо рассчитать приборное значение высоты (Н пр). Последовательность расчета Н пр следующая:
Н пр = Н ист + (± Н рел) + ( Н бар) – (± Н темп) – (± Н сум) |
(3.11.) |
сумма Н ист + ( Н рел) + ( Н бар) = Н испр – высота относительно изобарической поверхности давления, выставленного на ВД.
Н ист = Н пр + ( Н сум) + ( Н темп) – ( Н бар) – ( Н рел) (3.12.)

t0 – 15
где: Н темп = ───── ∙Н пр. (3.13.)
300
8 Воздушная скорость полета
Воздушной скоростью полета называется скорость перемещения летательного аппарата относительно воздуха. При этом различают истинную скорость (V ист ) и приборную скорость
(V пр ).
Истинная воздушная скорость используется экипажем в целях воздушной навигации, приборная скорость для пилотирования.
Скорость полета является векторной величиной. Ее вектор в общем случае не совпадает с продольной осью летательного аппарата. Отклонение вектора скорости от продольной оси определяется углами атаки и скольжения летательного аппарата. Однако, в воздушной навигации принято считать, что вектор воздушной скорости совпадает с продольной осью летательного аппарата и лежит в горизонтальной плоскости. Такое допущение существенно не влияет на точность решения навигационных задач, особенно при выполнении горизонтального полета. Обозначается воздушная скорость латинской буквой "V" и выражается в км/ч или м/с.
9 Методы измерения воздушной скорости.
10 Порядок расчета истиной и приборной скоростей и числа М.
Есть различные методы измерения скорости полета ЛА, но главным и основным является аэродинамический. Рассмотрим сущность этого метода. Скорость перемещения самолета относительно воздуха (V) закономерно связана с величиной скоростного (динамического) напора воздуха (q).
q = Pп – Pн |
|
|
|
|
q = |
V 2 |
; |
|
|
|
|
|
2 |
||||
|
|
|
|
|
|
|
|
|
= |
|
|
Í |
|
; |
|
|
|
gRT |
|
|
|
|||||
|
|
|
|
|
||||
|
|
|
|
H |
|
|
|
|
|
|
|
|
|
|
|
|
|
V = |
|
|
2q |
gRÒ |
|
(3.14.) |
||
Ðí |
|
|||||||
|
|
|
|
|
|
|||
где Рн – атмосферное давление воздуха на высоте полета Тн – температура воздуха на высоте полета по шкале Кельвина g – ускорение силы тяжести;
R – универсальная газовая постоянная;
q – Рп - Рн - скоростной напор;
ρ– плотность воздуха.
Как следует из (3.14) для определения воздушной скорости необходимо замерять три величины: скоростной напор, давление и температуру воздуха на высоте полета.
V ист = f (q Tн Pн)
В указателях скоростей КУС-1200, КУС-2500 измеряется только скоростной напор и давление на высоте полета.
Остальные величины приняты постоянными и равными стандартным на уровне моря (P0= 760 мм рт.ст., T = 288°К).
Широкая стрелка может правильно дать показания воздушной скорости лишь при полете у земли и в условиях стандартной атмосферы. В остальных случаях, которые наиболее вероятны, широкая стрелка имеет значительные погрешности и она фактически скорость полета не показывает. Это происходит потому, что с поднятием на высоту плотность воздуха существенно уменьшается, скоростной напор при той же скорости полета резко падает и широкая стрелка дает заниженные показания. Например, на высоте полета 10000 м и при воздушной скорости 800 км/ч, широкая стрелка показывает 462 км/ч.
Отсюда необходимо сделать вывод, что летчик не должен использовать показания широкой стрелки для решения задач воздушной навигации. Показания широкой стрелки КУС предназначены для пилотирования самолета, т.к. информирует летчика о величине скоростного напора.
Кроме широкой стрелки на шкале КУС помещена узкая стрелка, которая конструктивно связана как с манометрической коробкой, так и с анероидным блоком, обеспечивающим замер давления воздуха на высоте полета. Поэтому узкая стрелка показывает скорость, которая более близка к истинной воздушной скорости (V кус).
Vист = Vпр + κ ∙ Н(км)
0 < Н < 5 Vист = Vпр + 25 Н
5 < Н < 10 Vист = Vпр + 30 Н
10 < Н < 14 Vист = Vпр + 35 Н
14 < Н Vист = Vпр + 40 Н
Vпр = Vист – κ ∙ Н(км)
Кроме приборной и истинной скорости для расчета расхода топлива и ограничения максимальных скоростей полета используют число МАХА (М).
Число М – это отношение истинной воздушной скорости полета самолета Vист к скорости звука ан:
Vист
М = ────── ; (3.15)
а.
Подставив в формулу (3.15) значение скорости полета и скорости звука, можно сделать вывод, что для определения числа М достаточно измерить лишь динамическое и атмосферное давление. Необходимость измерения температуры наружного воздуха Тн 0на высоте полета в этом случае отпадает.
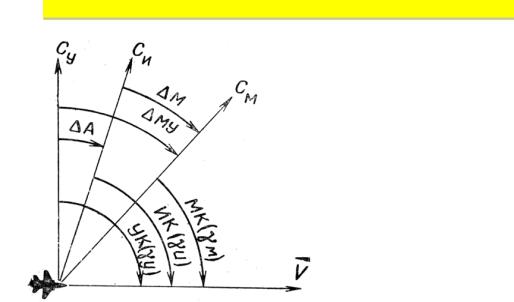
11 Истинный, магнитный и условный курсы, связь между ними.
Рис.4.4. Опорные направления для
отсчѐта курсов
В зависимости от принятой системы координат, в которой определяется направление движения самолѐта, различаются:
–истинный курс ИК (ψи) – курс, измеренный от северного направления истинного меридиана;
–магнитный курс МК (ψм) – курс, измеренный от северного направления магнитного меридиана;
–условный курс УК (ψу ) – курс, измеренный от северного направления условного меридиана;
–компасный курс КК (ψк) – компасный меридиан.
Для перехода из одной системы отсчѐта курса к другой используются следующие угловые поправки (рис.4.4):
–магнитное склонение М – угол, заключенный между истинным (геодезическим) и магнитными меридианами;
–азимутальная поправка А – угол, заключѐнный между условными и истинными меридианами;
–условное магнитное склонение Му – угол, заключѐнный между условным и магнитным меридианами;
–девиация К – угол, заключѐнный между магнитным и компасным меридианами.
Из рассмотренного выше видно, что курс самолѐта может измеряться в разных системах координат, следовательно необходимо уметь пересчитывать значение курса из одной системы в другую.
Процесс пересчѐта курса из одной системы в другую принято называть переводом курсов. Как следует из рис. 4.4 взаимосвязь между курсами можно записать следующей системой уравнений:

УК = МК + ( Му) УК = ИК + ( А) ИК = МК + ( М) МК = КК + ( К)
12 Определение азимутальной поправки и условного магнитного склонения.
На современных летательных аппаратах устанавливается курсовая система типа КСИ. Она служит для определения и выдерживания курса, углов разворота, пеленгов и курсовых углов радиостанций.
При использовании КСИ в полѐте лѐтчик будет иметь информацию только об условном курсе УК (ψ у). Однако, при подготовке к полѐту с карты снимается истинный путевой угол ИПУ (Ки), а чтобы перейти к условному путевому углу, необходимо вычислить азимутальную поправку А,
т.к.:
УК = ИК + ( А) УПУ = ИПУ + ( А)
В соответствии с тем, что в качестве опорного меридиана выбирается истинный или магнитный меридиан аэродрома вылета, приведем основные соотношения для определения А.
Если в качестве опорного меридиана выбирается истинный, то азимутальная поправка – определяется по формуле:
А = Ао + (Lо – Lт) sin Вср; но Ао = 00
Ат = (Lо – Lт) sin Вср
Сио |
|
Смт |
|
Сy |
||
|
Сит |
|
||||
|
|
|
|
|
|
|
|
|
|
Смо |
|
|
|
|
|
∆Мо |
∆Мт∆Мyт |
|||
Сy |
|
∆Мyо |
∆Ат |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
∆Ао=0º |
|
УКо |
|
|
|
УКт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ИПМ О Во, Lо |
|
Т |
|
|||
ППМ |
Вт, Lт |
|||||
Рис. 4.5. Определение азимутальной поправки ( А), если в качестве опорного меридиана выбирается истинный
Если в качестве опорного выбран магнитный меридиан аэродрома взлѐта, то в этом случае А определяется следующим образом (рис.4.6)
А0 = – Мо, тогда, если

А = А0 + (Lо – Lт ) sin Вср А = (Lо - Lт ) sin Вср – Мо
Условное магнитное склонение в любой точке равно сумме азимутальной поправки и магнитного склонения этой точки (рис.4.4).
Сио |
|
Сит |
|
|
Сy |
|||
|
|
|
|
|||||
|
|
∆Ао |
Смо |
|
∆Ат |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
||
|
|
|
|
Сy |
|
∆Мт |
|
∆Мyт |
|
|
∆Мо |
|
|
|
|||
|
|
|
|
|
||||
|
|
∆Мyо=0º |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ИПМ О Во, Lо |
ППМ Т Вт, Lт |
Рис. 4.6. Определение азимутальной поправки ( А), если в качестве опорного меридиана выбирается магнитный меридиан аэродрома взлѐта
Му = Ат + Мт
Следовательно, при опорном истинном меридиане
МУ = (Lо – Lт) sin Bср + Мт
а при опорном магнитном меридиане
МУ = (Lо – Lт) sin Вср – Мо + Мт
где Мт – магнитное склонение точки, для которой определяется поправка МУ.
УКт = ИКт+(± Ат) ИКт = МКт+(± Мт)
∆А = (Lо – Lт ) sin Вср
13 Порядок определения курса воздушного судна по небесным светилам
Курс самолѐта, как указывалось, является важным навигационным элементом, от точности которого зависит успех выполнения задания. Поэтому необходимо контролировать направление полѐта с целью исключения грубых ошибок в курсе. Днѐм, при видимости Солнца, направление полѐта проконтролировать по положению Солнца относительно продольной оси самолета.
Известно, что Солнце кульминирует в 12 часов по местному времени, при этом угол между северным направлением истинного меридиана и линией на Солнце равен 1800.Этот угол называется а з и м у т о м Солнца (Ас). Кроме того, за час Солнце смещается на запад на 150, надо знать, что