[Черновик Задания и методические указания по выполнению контрольной работы А.В. Сирин]
Федеральное агентство железнодорожного транспорта
Уральский государственный университет путей сообщения
А. В. Сирин
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН.
Екатеринбург
2011
Федеральное агентство железнодорожного транспорта
Уральский государственный университет путей сообщения
Кафедра «Проектирование и эксплуатация автомобилей»
А. В. Сирин
ТЕОРИЯ МЕХАНИЗМОВ И МАШИН.
Методические указания к выполнению контрольной работы
для студентов всех форм обучения специальностей:
190302 – «Вагоны»;
190303 – «Электрический транспорт железных дорог»
Екатеринбург
2011
Оглавление
1. Структурный анализ механизмов 4
1.1.Механизм и его элементы 4
1.2.Классификация кинематических пар 5
1.3.Виды звеньев 7
1.4.Структурные формулы механизмов 8
1.5.Структурная классификация плоских рычажных механизмов по Ассуру 9
1.6.Алгоритм структурной классификации плоских механизмов по Ассуру 11
1.7.Пример структурного анализа механизма 11
2.Кинематическое исследование механизмов методом планов 14
2.1.Построение плана положений 14
2.2.Построение планов скоростей и ускорений 15
2.3.Кинематический анализ кривошипно-коромыслового механизма. 16
2.4.Кинематический анализ кривошипно-ползунного механизма. 26
2.5.Кинематический анализ кривошипно-кулисного механизма. 33
2.6.Построение планов скоростей и ускорений для шестизвенного механизма 42
3.Указания к выполнению работы. 45
Структурный анализ механизмов
Механизм и его элементы
Механизм – система тел, предназначенная для преобразования движения одного или нескольких твердых тел и (или) сил, действующих на них, в требуемые движения других тел и (или) сил.
Звено – твердое тело, участвующее в заданном преобразовании движения. Звено может состоять из нескольких элементов (отдельно изготовляемых частей), которые соединены между собой неподвижно.
Кинематическая пара – соединение двух твердых тел механизма, допускающее их заданное относительное движение.
Кинематическая цепь – система звеньев и (или) твердотельных элементов механизма, образующих между собой кинематические пары.
Кинематическое соединение – кинематическая пара, образованная с помощью кинематической цепи.
Схема механизма – графическое изображение механизма, на котором посредством условных обозначений показаны принятые для исследования модели звеньев и кинематических пар. Условные обозначения должны соответствовать требованиям ГОСТ 2.770-68.
Структурная схема – безмасштабная схема механизма, предназначенная для исследования его структуры.
Обобщенная координата механизма – каждая из независимых между собой координат, определяющих положение всех звеньев механизма относительно стойки.
Связьограничение, наложенное на перемещение тела по данной координате.
Подвижность кинематической пары (число степеней свободы) − число независимых обобщенных координат, однозначно определяющее положение одного звена относительно другого.
Классификация кинематических пар
В зависимости от конструктивного исполнения, назначения и вида движения звеньев все кинематические пары классифицируются по следующим признакам:
по виду места контакта (места связи) поверхностей звеньев:
низшие, в которых контакт звеньев осуществляется по плоскости или по поверхности;
высшие, в которых контакт звеньев осуществляется по линиям или точкам.
по относительному движению звеньев, образующих пару:
вращательные;
поступательные;
винтовые;
плоские;
сферические.
по способу замыкания (обеспечения контакта звеньев пары):
силовые (за счет действия сил веса или силы упругости пружины);
геометрические (за счет конструкции рабочих поверхностей пары).
по числу условий связи, накладываемых на относительное движение звеньев и по числу подвижностей в относительном движении звеньев.
Если рассматривать звено, свободно движущимся в пространстве, то его положение в пространстве может быть описано с помощью шести координат: трёх поступательных П и трёх вращательных В (рисунок 1 .1).
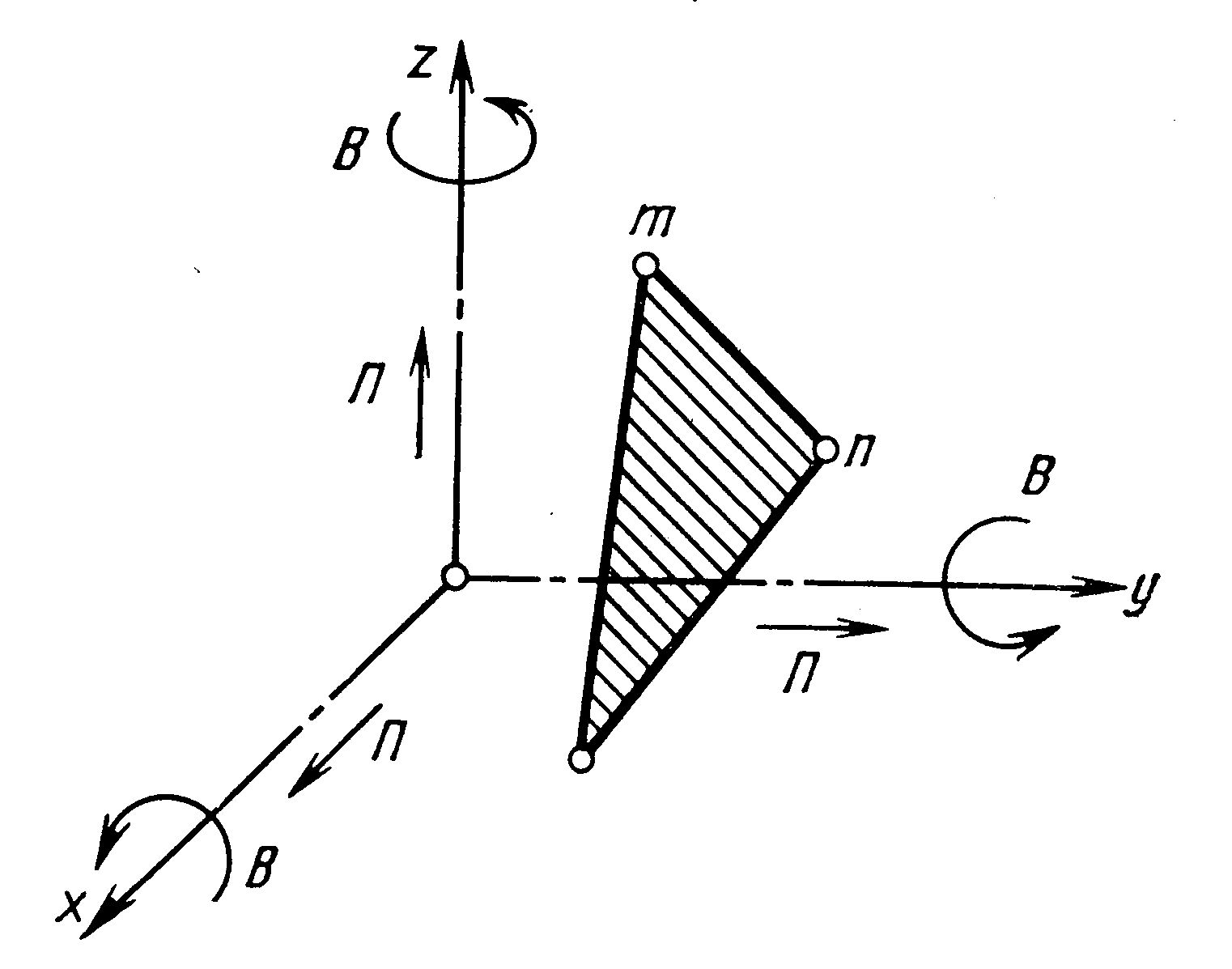
Рисунок 1.1 - Координаты тела, движущегося в пространстве
Как было сказано ранее, кинематическая пара – соединение двух твердых тел (звеньев) механизма, допускающее их заданное относительное движение.
Соединение двух звеньев между собой накладывает ограничения на перемещения каждого из них, зависящие от способа соединения звеньев между собой. Эти ограничения принято называть условиями связиилисвязямив кинематической паре. Класскинематической пары определяется количеством условий связи в кинематической паре. Из определения понятия «кинематическая пара» можно установить, что количество связейSне может быть меньше 1 (т.к. в этом случае будет отсутствовать контакт звеньев) и больше 5 (т.к. в этом случае соединение звеньев будет неподвижным). Следовательно, существует пять классов кинематических пар.
Число степеней свободы кинематической пары Hможно определить из выражения:
 .
.
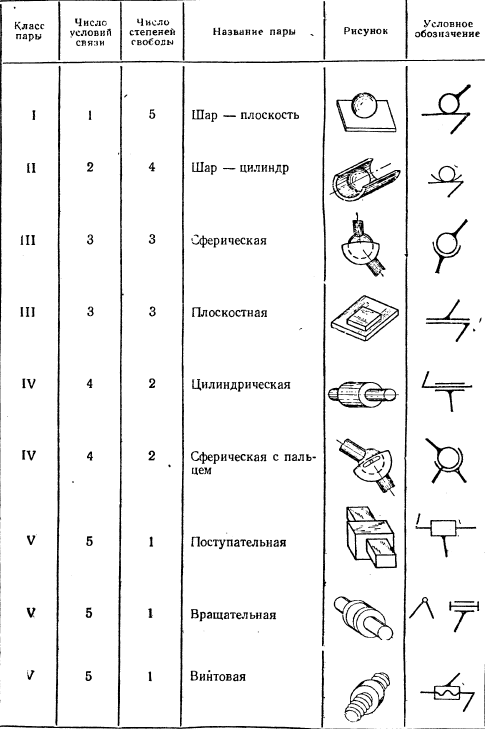
Классификация и условные обозначения кинематических пар приведены в таблице 1 .1.
Таблица 1.1 - Классификация кинематических пар по числу условий связи.