Виды звеньев
В зависимости от характера относительного движения различают следующие виды звеньев:
стойка – звено, принимаемое условно за неподвижное;
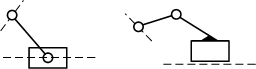
кривошип – звено механизма, образующее со стойкой вращательную кинематическую пару и совершающее полный оборот;
коромысло – звено механизма, образующее вращательную пару со стойкой, но не совершающее полный оборот;
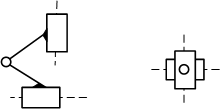
шатун – звено рычажного механизма, образующее кинематические пары только с подвижными звеньями (не образует кинематические пары со стойкой);
ползун – звено, образующее поступательную пару со стойкой;
кулиса – звено, образующее вращательную пару со стойкой и поступательную пару с другим подвижным звеном.
Структурные формулы механизмов
Число степеней свободы (подвижность) механизма– количество независимых обобщённых координат однозначно определяющих положение всех звеньев механизма в пространстве.
Структурная формула– алгебраическое выражение, устанавливающее взаимосвязь между числом степеней свободы механизма, числом подвижных звеньев, числом и подвижностью кинематических пар. В структурную формулу может также входить число избыточных связей.
В
общем случае подвижность механизма
 определяется по формуле Сомова –
Малышева:
определяется по формуле Сомова –
Малышева:
 , ( 1.1)
, ( 1.1)
где
 – количество подвижных звеньев механизма;
– количество подвижных звеньев механизма;
 – подвижность кинематической пары;
– подвижность кинематической пары;
 – количество кинематических пар
– количество кинематических пар -ой
подвижности (
-ой
подвижности ( – одноподвижных,
– одноподвижных, – двуподвижных и т.д.).
– двуподвижных и т.д.).
Формулу можно переписать, используя класс кинематической пары:
 ( 1.2)
( 1.2)
где
 – количество подвижных звеньев механизма;
– количество подвижных звеньев механизма;
 – класс кинематической пары;
– класс кинематической пары;
 – количество кинематических пар
– количество кинематических пар -го
класса (
-го
класса ( – первого класса,
– первого класса, – второго класса и т.д.).
– второго класса и т.д.).
Для
плоских механизмов подвижность механизма
 определяется
по формуле Чебышева:
определяется
по формуле Чебышева:
 ,
( 1.3)
,
( 1.3)
или, используя класс кинематической пары:
 .
( 1.4)
.
( 1.4)
Структурная классификация плоских рычажных механизмов по Ассуру
Для решения задач анализа и синтеза рычажных механизмов профессором Л. В. Ассуром была предложена оригинальная структурная классификация, согласно которой механизмы, не имеющие избыточных связей и местных подвижностей (рациональные механизмы), состоят из первичных (начальных) механизмов и структурных групп Ассура.
Первичный (начальный) механизм, состоящий из двух звеньев: (одно из них неподвижное (стойка), которые образуют кинематическую пару.
Структурная группа Ассура – кинематическая цепь, присоединение которой к механизму или её отсоединение образует механизм, имеющий подвижность, равную подвижности исходного механизма, не разделяемая на другие цепи с теми же свойствами.
Поводок - конечное звено группы Ассура, входящее в две кинематические пары, из которых одна имеет свободный элемент звена.
Группы могут быть различной степени сложности. Структурные группы Ассура делятся на классы в зависимости от числа звеньев, образующих группу, числа поводков в группе, числа замкнутых контуров внутри группы. В пределах класса (по Ассуру) группы подразделяются по числу поводков на порядки (порядок группы равен числу ее поводков). Механизмы классифицируются по степени сложности групп входящих в их состав. Класс и порядок механизма определяется классом и порядком наиболее сложной из входящих в него групп.
Наиболее широко применяются простые рычажные механизмы, состоящие из групп Ассура 2-го класса 2-го порядка. Число разновидностей таких групп для плоских механизмов с низшими парами невелико, их всего пять.
Таблица 1.2 - Структурные группы Ассура 2-го класса 2-го порядка.
|
Класс |
Порядок |
Обозначение |
Рисунок |
|
2 |
2 |
ВВВ |
|
|
ВВП |
| ||
|
ВПВ |
| ||
|
ПВП |
| ||
|
ППВ |
|