

Алгоритм структурной классификации плоских механизмов по Ассуру
Определить входное звено механизма.
Определить наиболее удаленное (от входного) звено механизма.
Попытаться выделить простейшую группу Ассура (2 класс, 2 порядок), включающую в себя наиболее удаленное звено.
Определить подвижность оставшегося механизма. Если подвижность не изменилась, значит, отсоединение произведено правильно (т.к. по определению группа Асура это группа нулевой подвижности.). Если подвижность изменилась, то следует попытаться выделить группу Ассура более высокого порядка.
Повторять п.п. 3,4 до тех пор, пока не останется только первичный механизм.
Пример структурного анализа механизма
Проведем структурный анализ рычажного механизма поперечнострогального станка. Структурная схема механизма приведена на рисунке 1 .2. Общее число звеньев механизмаkравно 6, число подвижных звеньевnравно 5. Звено 0стойка; звено 1кривошип (совершает полный оборот вокруг неподвижной оси); звенья 2,4шатуны (образуют КП только с подвижными звеньями); звено 3кулиса (вращается вокруг неподвижной оси и образует со звеном 2 поступательную пару); звено 5ползун (образует поступательную пару со стойкой).

Рисунок 1.2 - Структурная схема поперечно-строгального станка
Механизм содержит 7 кинематических пар, из них: 5 КП вращательных, одноподвижных (O,A,B,C,D) и 2 поступательных, одноподвижных (FиE).
Подвижность механизма найдем по формуле П.Л.Чебышева ( 1 .3):

Классификацию механизма по Ассуру начнем с определения входного звена механизма. Это кривошип 1. Затем в наиболее удаленной от кривошипа 1 части механизма отсоединим группу Ассура 2 класса 2 порядка (таблица 1 .2) звенья 4,5 (рисунок 1 .3 б).
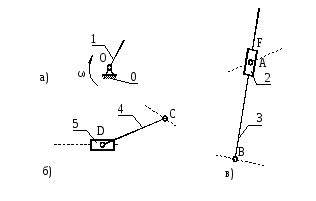
Рисунок 1.3 - Структурные группы Ассура
Проверим подвижность оставшегося механизма:

Подвижность механизма не изменилась, следовательно, отсоединение произведено верно. Следующая группа Ассура звенья 2,3 (рисунок 1 .3 в). Это также группа 2 класса 2 порядка. В результате после отсоединения двух групп Ассура остался первичный механизмзвенья 0,1 (рисунок 1 .3 а).
Данный механизм содержит две структурные группы Ассура 2 класса 2 порядка, следовательно, сам механизм имеет 2 класс 2 порядок.
Кинематическое исследование механизмов методом планов
План положений механизмаграфическое изображение в масштабе взаимного расположения звеньев механизма, соответствующее заданному значению обобщенной координаты. С помощью плана положений графически решается задача о положении звеньев, определяются неизвестные линейные и угловые координаты.
План скоростей (ускорений) механизмаграфическое построение в виде пучка лучейабсолютных скоростей (ускорений) точек звеньев и отрезков, соединяющих концы лучей,относительных скоростей (ускорений) соответствующих точек в данном положении механизма. С помощью плана скоростей (ускорений) графически определяются неизвестные скорости и ускорения точек механизма.
При построении планов положений, скоростей и ускорений звенья механизма, векторы скоростей и ускорений заменяются изображающими их отрезками. Связь между векторами и отрезками осуществляется через масштабный коэффициент (вычислительный масштаб). Значение масштабного коэффициента рассчитывают по формуле:
Масштабный коэффициент = . ( 2.5)