

Выражая вибросмещение в комплексном виде
х=Аеt
и подставив соответствующие значения х' – первой и х'' – второй производных по времени в формулу ( 1.5.1) найдем
 (1.5.2)
(1.5.2)
Амплитуду виброскорости при резонансе (когда 0 и -частоты соответственно собственных и вынужденных колебаний равны) определяют по формуле:
 , (1.5.3)
, (1.5.3)
где
– коэффициент
потерь,
![]() ,
,
Динамический коэффициент определяется по формуле:
 ,
,
Если 0 , то = 1, при 0 перемещения неограниченно растут (явление резонанса) и при 0 динамический коэффициент стремится к нулю.
Режим работы системы при котором 0 называется виброизоляционным. Виброизоляция - основной метод снижения общей вибрации. Активная виброизоляция уменьшает передачу колебаний от источника их возникновения. Пассивная защищает оператора за счет виброгашения и индивидуальных защитных средств. Частота собственных колебаний определяется по формуле:
![]() ,
(1.5.4)
,
(1.5.4)
где q – ускорение силы тяжести, Хсм – статическая осадка системы.
Таблица 1.5.1 Величина статической осадки под действием нагрузки
|
Материал |
Допустимая нагрузка,Н/см2 |
Динамический модуль упругости Н/см2 |
|
Допустимая
статическая осадка в зависимости от
толщины прокладок
|
|
Резина средней жесткости |
3-4 |
200-250 |
64 |
(0,015-0,016)h |
|
Резина в виде ребристых плит |
0,8-1,0 |
40-50 |
50 |
0,02h |
Приближенно частоту собственных колебаний можно определить:
![]()
В общем случае вибросистему с одной степенью свободы можно изобразить в виде элемента массы, не обладающего деформацией, и элементов упругости и демпфирования, не имеющих массы (рис. 1.5.2).
Точка О обозначает положение статического равновесия, от которого отсчитывается смещение X тела массой М под действием гармонической вынуждающей силы Ft. К телу приложены сила инерции FM, восстанавливающая сила FG и диссипативная демпфирующая сила FS.
В соответствии с принципом Д'Аламбера
![]() (
1.5.5)
(
1.5.5)
Свободная вибрация ( Ft=0) в отсутствии сил трения (FS=0) с течением времени не затухает. Виброскорость определяется выражением:
![]()
![]() ,
(1.5.6)
,
(1.5.6)
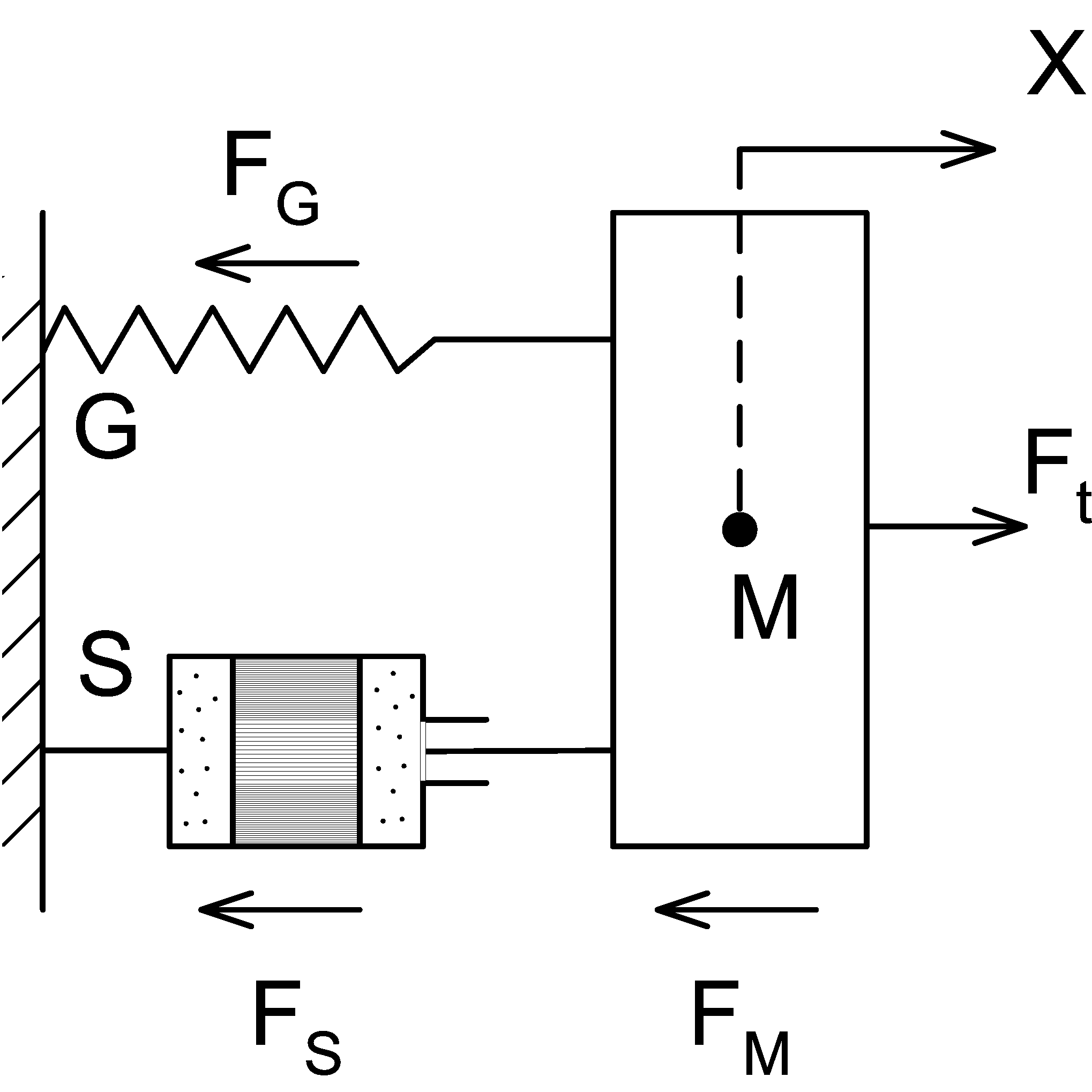
Рис. 4.2 Схема вибросистемы с одной степенью свободы.
в котором
![]() -сonst.
Условие
-сonst.
Условие
![]() с учетом выражений:
с учетом выражений:
![]() ,
( 1.5.7)
,
( 1.5.7)
где ZМ – механический импеданс материальной точки при гармонической вибрации и
![]() ,
( 1.5.8)
,
( 1.5.8)
где ZG – импеданс элемента упругости.
Эта величина – мнимая отрицательная, обратно пропорциональна частоте. В области высоких частот ею можно пренебречь.
Собственная частота вибросистемы
![]() , (
1.5.9)
, (
1.5.9)
где g-ускорение свободного падения, -прогиб при F0=FM в статике.
При наличии сил
трения (FS0)
свободная вибрация (Ft=0)
затухает. Амплитуда виброскорости с
течением времени убывает. Чтобы учесть
это, вводят комплексную угловую частоту
![]() ,где-коэффициент
демпфирования. Подставив выражение в
формулу ( 1.5.6 ) ’
вместо ,
получим
,где-коэффициент
демпфирования. Подставив выражение в
формулу ( 1.5.6 ) ’
вместо ,
получим
![]() , (
1.5.10)
, (
1.5.10)
где m()=me-t – амплитуда виброскорости с учетом затухания.
Из уравнения
![]() (1.5.11)
(1.5.11)
находят неизвестные величины и 0
![]()
 , (1.5.12)
, (1.5.12)
где
![]() – критический импеданс элемента
демпфирования.
– критический импеданс элемента
демпфирования.
Таким образом, коэффициент демпфирования равен половине импеданса элемента демпфирования, приходящегося на единицу массы, и свободная вибрация с затуханием осуществляется с частотой 0, зависящей от отношения импедансов S/Sкр, которое характеризует силы трения в системе. При отсутствии диссипативных сил (S/Sкр=0), частота 0*=0, если S/Sкр=1 – диссипативные силы имеют критическое значение, то частота 0*=0.
Вибрация Ft 0 происходит с частотой вынуждающей силы. Механический импеданс вибросистемы из (1.5.5 )
![]() , (1.5.13)
, (1.5.13)
Импеданс вибросистемы складывается из элементов демпфирования, массы и упругости. Его модуль Z и фазовый угол равны
![]() (
1.5.14)
(
1.5.14)
![]() (
1.5.15)
(
1.5.15)
Импеданс имеет минимальное значение при =0, при этом
(М-G/)=0
т.е. в резонансной области (Z=S) импеданс вибросистемы определяется импедансом элемента демпфирования. Вне резонансной области импедансом S можно пренебречь, тогда из выражения ( 1.5.13) следует, что в диапазоне высоких частот движение определяется вибрирующей массой (Z=), а в диапазоне низких частот жесткостью системы (= -G/).