

LibrEduMethodSectionsEditionsFilesDownload
.pdf
|
|
|
|
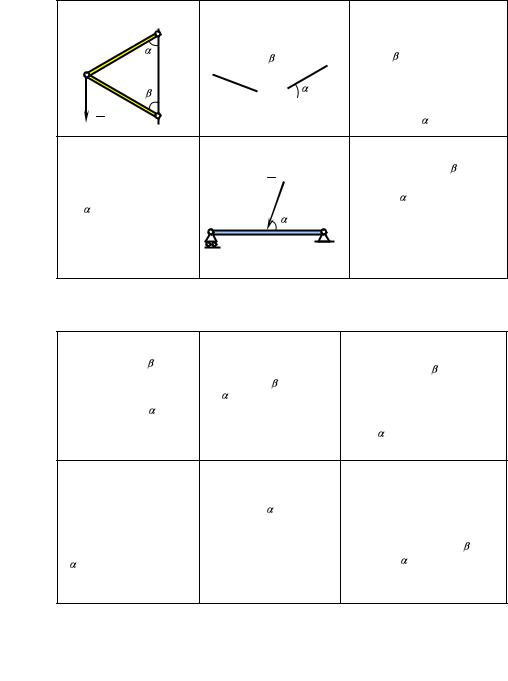
Рисунки к заданию 1.21 |
|
|
|
|
||
1. |
|
|
|
2. |
|
3. |
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
А |
|
В |
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
А |
|
|
30 |
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
В |
|
P |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
4. |
|
|
|
5. |
|
6. |
|
z |
|
|
|
|
|
|
|
В |
|
D |
|
|
|
|
|
|
|
D |
С |
|
|
|
В |
y |
|
|
|
|
D |
|
|
O |
|||
|
|
|
|
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
С |
|
|
А |
|
А |
|
|
С |
|
|
|
|
|
|
Р |
|
|
|
|
|
P |
|
|
|
|
A |
x |
|
|
P |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Рисунки к заданию 1.22 |
|
|
|
|
||
1. |
|
|
|
2. |
|
3. |
|
|
|
|
|
|
|
А |
|
В |
|
В |
|
|
|
|
|
|
А |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
С |
|
|
|
|
|
|
Р |
|
В |
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
4. |
|
|
|
5. |
|
6. |
|
|
z |
|
|
|
|
|
А |
D |
|
|
|
D |
|
В |
|
|
|
|
|
|
|
|
||
|
С |
|
А |
|
|
|
|
|
||
|
|
|
|
P |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
А |
|
|
|
|
P |
|
В |
x |
|
|
O |
В |
|
|
|
|
|
C |
|
|
|||
|
|
|
|
|
Р |
|
|
|||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
31 |
|
|
|
|
Рисунки к заданию 1.23 |
|
|
||||
1. |
|
|
|
|
2. |
|
|
3. |
|
|
|
|
А |
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
С |
|
|
|
|
А |
|
D |
|
|
А |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
|
|
|
P |
|
В |
|
|
|
|
Р |
|
|
|
4. |
|
|
|
|
5. |
|
|
6. |
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
|
|
|
|
|
P |
|
|
|
P |
|
|
|
|
|
|
|
|
В |
С |
|
|
|
|
А |
|
|
|
|
|
||
D |
В |
С |
|
|
|
|
А |
|
|
|
|
|
В |
|
|
|
|
||||
|
|
|
|
|
|
А |
|
|
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
С |
|
|
O |
D |
|
|
|
|
|
|
|
|
|
||
Р |
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
Рисунки к заданию 1.24 |
|
|
||||
1. |
|
|
|
|
2. |
|
|
3. |
|
D |
|
|
|
|
|
|
|
D |
|
|
|
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
А |
|
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
В |
||
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
Q |
|
|
Q |
Р |
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4. |
|
|
|
|
5. |
В |
|
6. |
z |
|
|
|
|
|
|
|
|
|
В |
||
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
O |
P |
С |
|
А |
|
P |
|
А |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
x |
|
C |
|
|
|
|
|
|
|
|
|
||
|
|
P |
|
|
|
|
|
|
D |
y |
|
|
|
|
|
|
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
32 |
|
|
|
Рисунки к заданию 1.25 |
|
|
|||
1. |
А |
|
2. |
|
|
3. |
|
|
|
|
|
|
|
|
|
|
|
|
С |
|
D |
|
А |
D |
|
А |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
D |
В |
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
Р |
|
Q |
С |
|
|
|
|
|
|
|
|
|
|
|
||
|
В |
|
|
|
Р |
|
Q |
|
|
|
|
|
|
|
|
|
|
4. |
|
|
5. |
|
|
6. |
z |
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
С |
D |
|
D |
В |
|
|
|
|
|
|
|
||
А |
|
В |
|
|
|
|
O |
|
|
|
|
|
А |
|
С |
||
|
|
|
|
|
|
|
||
|
С |
|
А |
|
Р |
x |
P |
y |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
33

2 РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ
Систему сил называют плоской произвольной, если линии действия всех сил системы расположены произвольно в одной плоскости, т.е. не параллельны и не пересекаются в одной точке. Такие системы не всегда эквивалентны равнодействующей.
Для эквивалентного преобразования плоской произвольной системы сил используются понятия о моменте силы относительно центра, о паре сил, о параллельном переносе силы.
Алгебраическим моментом силы относительно произвольно вы-
бранного центра (точки) О называется взятое со знаком плюс или минус произведение модуля силы на плечо (рисунок 2.1):
|
|
|
|
|
|
|
|
|
|
|
F h . |
(2.1) |
|
|
|
|
|
|
MO F mO F |
||||||
|
|
|
|
|
|
|||||||
|
|
|
Плечом h силы F относительно выбранного центра О называют |
|||||||||
|
|
|
|
длину перпендикуляра, опущенного из центра О на |
||||||||
|
|
|
|
линию действия силы. |
|
|
||||||
|
|
А |
h |
|
|
Момент силы считается положительным, если |
||||||
F |
О |
сила стремится поворачивать тело вокруг выбранного |
||||||||||
В |
|
центра против хода часовой стрелки (cо стороны на- |
||||||||||
|
блюдателя). |
|
|
|||||||||
|
|
|
|
|
|
|||||||
|
Рисунок 2.1 |
|
|
Из определения алгебраического момента си- |
||||||||
|
лы относительно точки следует, что он не зависит от |
|||||||||||
|
|
|
|
|||||||||
переноса силы вдоль еѐ линии действия. Алгебраический момент силы относительно точки равен нулю, если линия действия силы проходит через моментную точку. Численно алгебраический момент относительно точки равен удвоенной площади треугольника, построенного на силе как основании и моментной точке как вершине:
MO F  2пл. OAB . (2.2)
2пл. OAB . (2.2)
Парой сил называют систему двух равных по модулю противоположно направленных сил с параллельными линиями действия (рисунок 2.2).
|
|
|
|
|
|
|
|
|
|
|
|
|
М |
||
|
|
|
|
|
|
|
|
|
P2 |
М |
|||||
А |
F2 |
|
А |
|
М |
||||||||||
|
|
|
|
|
|
||||||||||
|
|
|
|
В |
|
|
|
|
|
|
|
||||
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P1 |
|
|
|
|
|
|
|
|
|
F1 |
|
|
|
|
|
d |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Рисунок 2.2 |
|
|
|
|
|
Рисунок 2.3 |
|
|
|
|
Рисунок 2.4 |
||||
34
Пару сил нельзя упростить, т.е. заменить одной силой – равнодейст-
вующей. Пару сил обозначают ( F1 ; F2 ) , ( P1 ; P2 ) и т.д.
Пара сил характеризуется плоскостью действия, направлением вращения и моментом пары.
Алгебраический момент пары равен взятому со знаком плюс или минус произведению одной из сил пары на плечо пары. Плечом d пары называют кратчайшее расстояние между линиями действия сил пары (рисунок
2.3):
|
|
|
|
|
|
|
|
|
|
M P1 ,P2 m P1 ,P2 P1 d P2 d . |
(2.3) |
||||||||
Момент пары сил считается положительным, если пара стремится вращать тело против хода часовой стрелки. На расчетных схемах пару сил принято обозначать, как показано на рисунке 2.4.
Пару сил, не изменяя еѐ момента можно преобразовывать: поворачивать и переносить в плоскости действия, переносить в параллельную плос-
кость, изменять соответственно величину сил и плечо. Сумма |
моментов |
|||||||||||||||
|
|
|
|
|
|
|
сил пары относительно произвольного центра равна |
|||||||||
|
|
|
d |
F2 |
||||||||||||
|
|
А |
моменту пары (рисунок 2.5): |
|
||||||||||||
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
В |
|
|
|
mO F1 mO F2 = F1· Oa − F2·Ob = |
|
||||||||
|
|
|
|
|
|
|||||||||||
F1 |
b |
|
|
|
= F1(ab + Ob) − F2·Ob = F1·ab = F1·d = |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
О |
|
|
|
= M ( F1 ,F2 ) . |
(2.4) |
||||||||
Эквивалентное преобразование плоской произвольной системы сил сводится к еѐ приведению к произвольно выбранному центру. Согласно теореме Пуансо произвольная плоская система сил,
приложенная к твердому телу, эквивалентна одной силе (главному вектору), приложенной в центре приведения, и одной паре сил (результирующая пара), момент которой называют главным алгебраическим моментом.
Главный вектор RO* системы равен векторной сумме всех сил сис-
темы:
|
* n |
|
. |
(2.5) |
|
R |
F |
||||
|
O |
|
k |
|
|
|
k 1 |
|
|||
|
|
|
|||
Главный алгебраический момент равен алгебраической сумме мо-
ментов всех сил системы относительно выбранного центра приведения:
M* n m |
|
|
|
|
|
|
O |
F . |
(2.6) |
||||
O |
k 1 |
|
k |
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
Для равновесия плоской произвольной системы сил, приложенной к твердому телу, необходимо и достаточно, чтобы главный вектор и главный момент этой системы одновременно равнялись нулю:
35
|
|
|
|
* |
0 , |
M* |
0 . |
(2.7) |
||
|
|
R |
||||||||
|
|
|
O |
|
O |
|
|
|||
|
|
|
|
|
|
|
|
|||
Из уравнений (2.5) и (2.6): |
|
|
|
|
|
|
||||
n |
|
0 , |
n mO |
|
|
0 . |
(2.8) |
|||
Fk |
Fk |
|||||||||
k 1 |
k 1 |
|
|
|||||||
Модуль векторной суммы определяется через суммы проекций сил |
||||||||||
на выбранные координатные оси: |
|
|
|
|
|
|
||||
R* n |
F |
n Х |
k |
, |
R* |
n F |
|
n |
Y |
, |
||||||
x |
k |
1 |
|
k х |
k 1 |
|
|
y |
ky |
k |
||||||
|
|
|
|
|
|
|
|
k 1 |
|
k |
1 |
|
||||
|
|
|
|
|
* |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
( X |
k |
)2 |
(Y |
)2 . |
|
(2.9) |
|||
|
|
|
|
O |
|
|
|
|
|
k |
|
|
|
|
||
Из уравнений (2.8) и (2.9) записываются аналитические условия равновесия
плоской произвольной системы сил:
n |
|
n Yk 0, |
n mO |
|
|
|
Х k 0, |
Fk 0 . |
(2.10) |
||||
k |
1 |
k 1 |
k 1 |
|
||
Для равновесия плоской произвольной системы сил, приложенной к твердому телу, необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на две, произвольно выбранные координатные оси, и алгебраическая сумма моментов всех сил, относительно произвольно выбранной точки, одновременно равнялись нулю.
Кроме формы (2.10) записи условий равновесия можно использовать еще две равнозначные формы в виде (2.11) и (2.12):
n |
|
0, n mA |
|
|
0, n mB |
|
|
|
Х k |
Fk |
Fk 0 . |
(2.11) |
|||||
k |
1 |
k 1 |
k 1 |
|
||||
Прямая АВ не должна быть перпендикулярна выбранной оси.
n mA |
|
|
0, n mB |
|
|
0, n mC |
|
|
|
Fk |
Fk |
Fk 0 . |
(2.12) |
||||||
k 1 |
k 1 |
k 1 |
|
||||||
Моментные точки А, В и С не должны лежать на одной прямой.
В частном случае для плоской системы параллельных сил доста-
точно двух условий равновесия:
n |
|
n |
|
|
n mO ( |
|
|
|
Х k |
Fk |
0 , |
Fk ) 0 . |
(2.13) |
||||
k |
1 |
k |
1 |
|
k 1 |
|
||
Ось х направлена параллельно силам.
Существует и вторая форма условий равновесия системы параллельных сил:
n mA |
|
|
0, n mB |
|
|
|
Fk |
Fk 0 . |
(2.14) |
||||
k 1 |
k 1 |
|
||||
Прямая АВ не должна быть параллельна силам.
36
При решении конкретных задач бывает сложно вычислить длину плеча какой-то силы. В таких случаях удобно силу разложить на составляющие параллельные осям и воспользоваться теоремой Вариньона о моменте равнодействующей.
Момент равнодействующей системы сил относительно произвольной точки равен алгебраической сумме моментов сил системы относительно той же точки:
|
|
n mO |
|
|
|
MO R |
Fk . |
(2.15) |
|||
|
|
k 1 |
|
||
Решение задач на равновесие несвободного твердого тела под действием плоской произвольной системы сил рекомендуется выполнять в следующем порядке.
1.Понять физический смысл задачи и рисунок к ней.
2.Выполнить рисунок (расчѐтную схему), на котором показать: твердое тело, равновесие которого рассматривается; заданные нагрузки; реакции наложенных на тело связей;
систему координат, направляя оси параллельно линиям действия искомых величин.
3.Проверить статическую определимость задачи.
4.Выбрать одну из форм условий равновесия полученной системы сил и составить соответствующие уравнения равновесия.
За моментные точки удобнее принимать точки пересечения линий действия неизвестных сил.
5.Решить систему составленных уравнений относительно величин, подлежащих определению. Если в результате решения задачи величина ка- кой-либо реакции или еѐ составляющей окажется отрицательной, то направление этой силы противоположно первоначально выбранному направлению.
6.Проверить решение, составив уравнение моментов заданных и найденных сил относительно произвольной точки, не совпадающей с моментными точками в основной части решения задачи. При правильном решении проверочное уравнение обращается в тождество 0 ≡ 0.
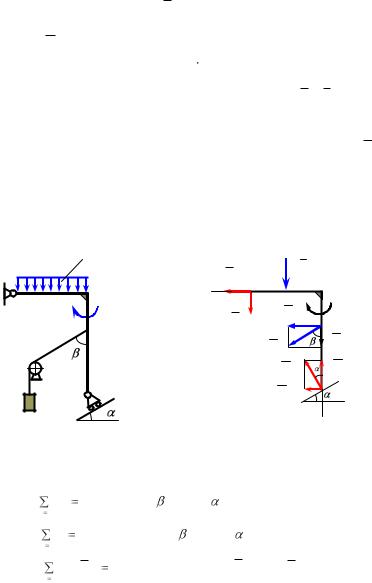
Пример. Определить реакции связей ломаного стержня АСВ, изображенного на рисунке 2.6. В точке D закреплен канат, переброшенный через блок К и несущий на конце тело весом Р.
Дано: Р = 4 кН, М = 6 кН·м, q = 3 кН/м, АС = BD = 2 м, СD = 1 м,
= 30 , = 60 .
Определить: RA и RB .
37
Решение.
Изображаем ломаный стержень без связей (рисунок 2.7). Стержень
нагружен сосредоточенной силой P , парой сил с моментом М, равномерно распределенной нагрузкой интенсивностью q, которую заменяем сосредото-
ченной силой Q (равнодействующей), приложенной в середине пролета АС:
Q = q  AC = 3 2 = 6 кН.
AC = 3 2 = 6 кН.
В точке А стержень закреплен неподвижным цилиндрическим шарниром. Реакцию шарнира представляем составляющими X A ,YA , направлен-
ными параллельно выбранным координатным осям. Направление составляющих произвольное.
В точке В стержень опирается на опору на катках. Реакция RB пер-
пендикулярна поверхности, по которой может перемещаться каток, и направлена от поверхности.
На тело действует плоская произвольная система сил, для которой достаточно трѐх условий равновесия. Искомых величин тоже три: X A ,YA , RB , т.е. задача статически определима.
|
q |
|
|
|
|
Q |
|
|
X A |
|
|
|
|
|
|
А |
Е |
|
С |
|
А |
С |
x |
|
|
|
М |
|
|
|
|
Px |
||
|
М |
YA |
|
D |
||
|
D |
|
|
|
|
Py |
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
К |
|
|
R |
B |
RBy |
|
|
|
|
|
|
|
|
В |
|
|
RBx |
В |
|
|
P |
|
|
|
|
y |
|
|
|
|
|
|
|
|
Рисунок 2.6 |
|
|
Рисунок 2.7 |
||
Применяем условия равновесия в форме (2.10):
n |
X k |
0 , |
XA + P·sin + RB sin = 0, |
k |
1 |
|
|
n Yk |
0 , |
Q + YA + P·cos − RB·cos = 0, |
|
k |
1 |
|
|
n mA ( Fk ) 0 , − Q·AE − M + mA( P ) + mA( RB ) = 0.
k 1
38
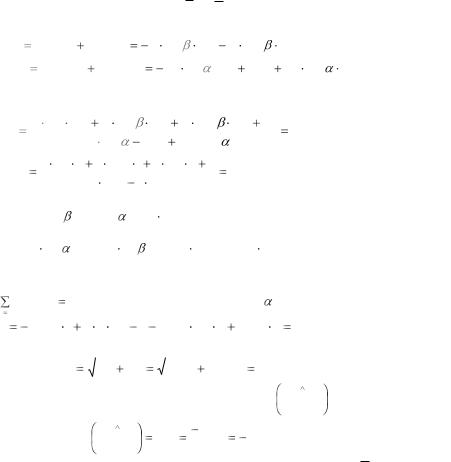
Для определения моментов сил P и RB воспользуемся теоремой Вариньона о моменте равнодействующей
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
mA (Р) mA (Рх ) mA (Ру ) |
|
|
P sin |
|
|
CD |
P cos |
|
AC, |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
mA (RB ) mA (RBx ) mA (RBy ) |
|
|
RB sin (BD |
DC) |
|
RB cos |
AC. |
||||||||||||||||||||||||||||||||||
Подставляя эти зависимости в третье уравнение, выразим значение |
|||||||||||||||||||||||||||||||||||||||||
реакции RB: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
RB |
Q 0,5 |
|
AC |
|
|
|
P sin |
CD |
P cos |
AC M |
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
AC cos |
|
|
BD |
DC sin |
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
6 |
0,5 |
|
2 |
|
4 |
0,86 1 |
4 |
0,5 |
2 |
6 |
|
|
88,36 кН. |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
0,86 |
|
3 0,5 |
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
Из первого уравнения определяется ХА: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
ХА = − Р sin |
|
|
− RB sin |
= −4 0,86 − 88,36·0,5 = − 47,60 кН. |
|
||||||||||||||||||||||||||||||||||||
Из второго уравнения определяется YА: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
YА = RB cos |
|
|
− Q − P cos |
= 88,36 0,86 − 6 − 4 0,5 = 67,98 кН. |
|||||||||||||||||||||||||||||||||||||
Составляем проверочное уравнение моментов относительно точки D. |
|||||||||||||||||||||||||||||||||||||||||
В это уравнение войдут все определяемые величины: |
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
n mD ( |
|
|
0 , |
|
XA·DC + Q·0,5·AC − M − RB·sin |
·BD + YA·AC = |
|||||||||||||||||||||||||||||||||||
Fk ) |
|
||||||||||||||||||||||||||||||||||||||||
k 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
47,62 1 |
6 2 0,5 |
6 |
88,36 0,5 2 |
67,98 2 0 , 0 ≡ 0. |
|||||||||||||||||||||||||||||||||||||
Задача решена правильно. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
RA |
|
|
|
|
X A2 YA2 |
|
|
47,62 |
67,982 |
83 кН. |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
Направление реакции R A |
определяется косинусом угла |
|
RA ; Cx |
: |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
X A |
|
|
|
47,6 |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
cos |
|
RA ; Cx |
|
|
|
|
0,57 . |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
R A |
|
|
|
83 |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Ответ: RB = 88,36 кН, RA = 83 кН. Знак минус у составляющей X A оз-
начает, что направление этой составляющей реакции шарнира А противоположно показанному на рисунке.
ЗАДАНИЯ ДЛЯ САМОСТОЯТЕЛЬНОЙ РАБОТЫ
Данная тема содержит 25 вариантов заданий по 6 задач в каждом. Рисунки к задачам по вариантам помещены на страницах 61 − 73.
Искомыми величинами в большинстве задач являются реакции связей, наложенных на абсолютно твердое тело.
39

Примечание − Во всех вариантах трением в шарнирных связях и блоках пренебречь.
ВАРИАНТЫ ЗАДАНИЙ
Задание 2.01
2.01.1. Определить реакции заделки консольной балки АВ, находящейся под действием равномерно распределенной нагрузки c интенсивностью q = 1,5 кН/м, сосредоточенной силы P = 3 кН и пары сил с моментом
М= 2,5 кН м, если а = 0,8 м.
2.01.2.Однородная балка ВС весом 400 Н удерживается в равновесии при помощи невесомых стержней АВ, СD и ЕК. Определить их реакции, если
F = 150 Н.
2.01.3.Балка АВ длиной 8 м и весом 60 Н концом А закреплена шарнирно, в точке D опирается на выступ стены. К точке В балки прикреплена веревка с грузом весом Q = 10 Н на конце, перекинутая через блок Е. На балку
действует пара сил с моментом М = 10 Н м. Определить реакции опор А и D, если DВ = 1/4 АВ.
2.01.4. Жесткая рама закреплена в точке А шарнирно, а в точке В прикреплена к шарнирной опоре на катках. На раму действует пара сил с моментом М = 10 кН м, равномерно распределенная нагрузка с интенсивностью q = 2 кН/м и две сосредоточенные силы F1 = 3 кН и F2 = 5 кН. Определить реакции связей, если АЕ = СК = а, АС = 3а, КD = 2а, ВD = 4а и а = 0,8 м.
2.01.5.Однородная плита АВ весом 100 Н свободно опирается в точке А на гладкую плоскость и удерживается под углом 45° к горизонту двумя стержнями ВС и ВD, ∆ВСD равносторонний. Точки С и D лежат на горизонтальной прямой. Пренебрегая весом стержней и считая крепления в точках В,
Си D шарнирными, определить реакцию опоры А и усилия в стержнях.
2.01.6.Определить реакции жесткой заделки однородной балки АВ весом 100 Н, если вес груза Р = 50 Н, q = 200 Н/м, АС = СD = 0,4 м, ВD = 0,6 м. Весом и размерами блока В пренебречь.
Задание 2.02
2.02.1. Определить реакции заделки консольной балки АВ, находящейся под действием равномерно распределенной нагрузки с интенсивностью q = 2,3 кН/м и пары сил с моментом М = 3,5 кН м, если, а = 2 м.
40