

Система автоматического управления курсом судна Устройство и принцип работы системы
Основным режимом работы системы автоматического управления курсом судна (авторулевого) является управление движением судна в заданном направлении - стабилизация заданного курса. Упрощенная схема авторулевого типа «Печора» показана на рис. 6.

Курс судна φ определяется гирокомпасом (ГК) и передается на пульт управления сельсинной парой: сельсин-датчик (СД) и сельсин-приемник (СП), работающей в индикаторном режиме. СП, через червячную передачу (ЧП), поворачивает ось механического дифференциала (МД). Другую ось МД поворачивает штурвал (Ш), задающий курс судна φ0. Выходная ось МД поворачивает вращающийся трансформатор (ВТ) на угол Δφ = φ0 – φ, равный отклонению курса судна от заданного значения. Это отклонение, представленное напряжением U1, поступает в блок коррекции (БК), который формирует сигнал U2 , задающий положение руля.
Рулевой привод является следящей системой, отрабатывающей заданное значение угла поворота руля. Если угол поворота баллера руля α, измеряемый датчиком угла (ДУ), отличается от заданного значения, появляется сигнал рассогласования U4 = U2 - U3 . Этот сигнал, усиленный усилителем (УТ), поступает на электрогидравлический исполнительный элемент ГД. В его состав входят электрический двигатель, насосный агрегат и гидравлический двигатель. Электрический двигатель перемещает золотник, управляющий подачей масла в силовой цилиндр гидравлического двигателя под давлением, созданным насосным агрегатом. Гидравлический двигатель поворачивает баллер руля.
Структурная схема системы
Рассмотрим математическую модель авторулевого, показанную на рис. 7. Курсовой угол φ и угловая скорость изменения курса ω
 связаны
соотношениями ω=dφ/dt,
или ω=pφ,
φ= ω/p:
курсовой угол является интегралом
угловой скорости ω. Передаточная функция
интегрирующего звена 1/p.
Угловая скорость ω зависит от управляющего
воздействия – угла перекладки руля (α)
и возмущающего воздействия со стороны
волн, течения, ветра. Влияние возмущений
на угловую скорость ω можно оценить
эквивалентным углом перекладки руля
М,
оказывающим такое же воздействие.
Воздействия α и М
суммируются.
Зависимость ω от α, при малых значениях
ω и α, типичных для режима стабилизации
курса, можно определить по виду начального
участка переходной характеристики
ω(t),
полученной при ступенчатой перекладке
руля. На этом участке (рис. 8) крутизна
переходной характеристики почти
постоянна и пропорциональна углу
перекладки α0.
Такую реакцию на входное воздействие
дает интегрирующее звено с передаточной
функцией 1/(Tp),
где параметр Т
имеет физический смысл времени, за
которое угловая скорость ω достигнет
значения 1○/c
при перекладке руля на 1○.
связаны
соотношениями ω=dφ/dt,
или ω=pφ,
φ= ω/p:
курсовой угол является интегралом
угловой скорости ω. Передаточная функция
интегрирующего звена 1/p.
Угловая скорость ω зависит от управляющего
воздействия – угла перекладки руля (α)
и возмущающего воздействия со стороны
волн, течения, ветра. Влияние возмущений
на угловую скорость ω можно оценить
эквивалентным углом перекладки руля
М,
оказывающим такое же воздействие.
Воздействия α и М
суммируются.
Зависимость ω от α, при малых значениях
ω и α, типичных для режима стабилизации
курса, можно определить по виду начального
участка переходной характеристики
ω(t),
полученной при ступенчатой перекладке
руля. На этом участке (рис. 8) крутизна
переходной характеристики почти
постоянна и пропорциональна углу
перекладки α0.
Такую реакцию на входное воздействие
дает интегрирующее звено с передаточной
функцией 1/(Tp),
где параметр Т
имеет физический смысл времени, за
которое угловая скорость ω достигнет
значения 1○/c
при перекладке руля на 1○.
Г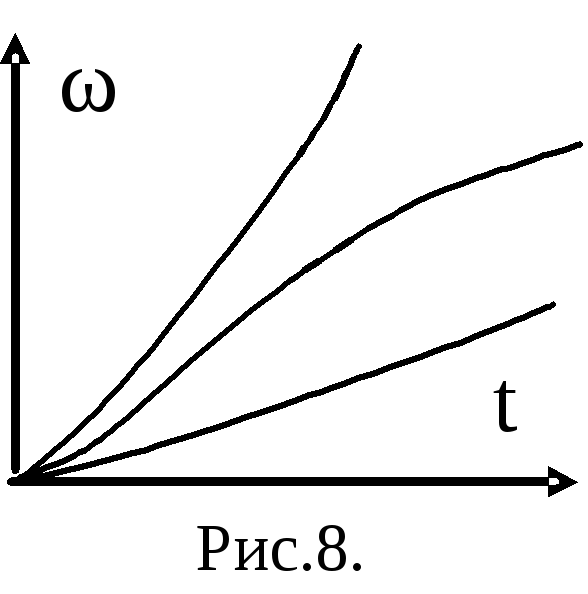 идравлический
двигатель рулевого привода поворачивает
баллер руля со скоростью, пропорциональной
подаче масла в силовой гидроцилиндр.
Динамика такого процесса описывается
интегрирующим звеном с передаточной
функциейk2/p.
Характеристика усилителя (УТ) рулевого
привода авторулевого «Печора» достаточно
точно аппроксимируется релейной
трехпозиционной характеристикой.
Усилитель подает на последующие
устройства рулевого привода либо
нулевой, либо максимальный сигнал.
Соответственно подача масла в силовой
гидроцилиндр либо нулевая, либо
максимальная. Благодаря такой
характеристике руль перекладывается
с постоянной скоростью (3…5○/с
у речных судов), независимо от величины
сигнала на входе усилителя. Зона
нечувствительности введена для того,
чтобы не было реакции на случайные
помехи на входе усилителя. Нечувствительность
является причиной появления статической
ошибки рулевого привода. Ограничение
угла перекладки руля отражено в модели
рулевого привода введением соответствующей
нелинейности.
идравлический
двигатель рулевого привода поворачивает
баллер руля со скоростью, пропорциональной
подаче масла в силовой гидроцилиндр.
Динамика такого процесса описывается
интегрирующим звеном с передаточной
функциейk2/p.
Характеристика усилителя (УТ) рулевого
привода авторулевого «Печора» достаточно
точно аппроксимируется релейной
трехпозиционной характеристикой.
Усилитель подает на последующие
устройства рулевого привода либо
нулевой, либо максимальный сигнал.
Соответственно подача масла в силовой
гидроцилиндр либо нулевая, либо
максимальная. Благодаря такой
характеристике руль перекладывается
с постоянной скоростью (3…5○/с
у речных судов), независимо от величины
сигнала на входе усилителя. Зона
нечувствительности введена для того,
чтобы не было реакции на случайные
помехи на входе усилителя. Нечувствительность
является причиной появления статической
ошибки рулевого привода. Ограничение
угла перекладки руля отражено в модели
рулевого привода введением соответствующей
нелинейности.
Без учета нелинейностей динамика рулевого привода описывается апериодическим звеном с передаточной функцией
|
|
(17) |
Его постоянная времени Трп =1/(k2k3), длительность переходного процесса tp≈3Трп. При стабилизации курса в спокойных условиях руль обычно перекладывается в диапазоне 3…5○, время перекладки tp < 2c, так что Трп < 1с. Значение Трп на несколько порядков меньше постоянной времени Т судна. Будем считать, что Трп = 0 и описывать динамику рулевого привода усилительным звеном с коэффициентом передачи 1/k3.
В авторулевых обычно
применяют пропорционально-интегрально-дифференциальный
(ПИД) закон регулирования, для чего в
контур управления вводится звено с
передаточной функцией
![]() .
Дифференцирующее звено расширяет
область устойчивости системы. Его
инерционностью можно пренебречь (τ =
0). Интегрирующее звено устраняет
статическую ошибку, вызванную возмущающим
воздействиемМ.
.
Дифференцирующее звено расширяет
область устойчивости системы. Его
инерционностью можно пренебречь (τ =
0). Интегрирующее звено устраняет
статическую ошибку, вызванную возмущающим
воздействиемМ.
Для того, чтобы
авторулевой не реагировал на случайные
отклонения от курса, вызванные
кратковременными воздействиями волн
и порывов ветра, вводится фильтр низких
частот с передаточной функцией Wф(р).
Амплитудно-частотная характеристика
(АЧХ) фильтра должна иметь крутой спад
на границе полосы пропускания. Вид АЧХ
зависит от типа и порядка фильтра. Чем
выше порядок, тем круче спад АЧХ. Будем
рассматривать простейший фильтр второго
порядка с передаточной функцией
![]()
Гирокомпас, сельсины СД-СП, передающие курс судна в пульт управления, и сельсины ВТ, ДУ, преобразующие угол поворота вала в напряжение (Δφ в U1, α в U3), будем считать усилительными звеньями. Их коэффициенты передачи обозначены на рис.7 как k1, k3, k4.
В результате проведенного анализа характеристик элементов системы получаем структурную схему, показанную на рис. 9. Для уменьшения числа параметров, которые надо учитывать при анализе динамики системы, принято k4=1 и введено обозначение kм = k1/k3.
