

13. Основные типы промышленных регуляторов (по реализуемому закону регулирования.)
Поплавковый
регулятор уровня.
Одним из первых в мире технических
регуляторов является поплавковый
регулятор уровня жидкости, построенный
И. И. Ползуновым в 1795 г. для поддержания
постоянного уровня воды в паровом котле.
Сейчас регуляторы такого типа находят
широкое применение в технике. Примером
простейшего и в то же время наиболее
распространенного современного
регулятора уровня является поплавковая
камера автомобильного карбюратора
(рис. 1.24, а).

Объектом регулирования является камера 1, в которой уровень бензина Н непосредственно измеряется положением поплавка 2. Системой рычагов с поплавком связана игла 3, регулирующая приток бензина в камеру Q. При уровне Н = Н0 игла полностью запирает канал притока бензина, т. е. Q = 0. Величина H 0 задает требуемое значение регулируемой величины; она устанавливается при наладке регулировкой рычага иглы.
Внешним неконтролируемым воздействием служит расход бензина Q, поступающего к жиклерам двигателя. Этот расход приводит к уменьшению уровня в поплавковой камере.

Функциональная схема рассматриваемого регулятора показана на рис. 1.24, б. В ней выделено два элемента системы: поплавковая камера, служащая объектом, совмещенным с измерительным устройством, на вход которого подается разность Q - G, а выходной величиной является уровень бензина H; исполнительное устройство, представляющее собой управляемый изменением положения поплавка и перемещением иглы канал притока бензина, задающий величину Q.
Поплавковый
регулятор уровня.
Зависимость между перемещением поплавка
е
= Н0
— Н по
отношению к заданному уровню Н0
и
скоростью притока бензина Q в поплавковую
камеру выражается некоторой монотонной
функцией Q (e). Учитывая уравнение
резервуара (1.3), для регулятора можно
записать уравнение:
![]()
которое
соответствует общему выражению (2.1) при
x =
H,.
v,
=
H0,
f
=
H,.
v,
=
H0,
f =G.
=G.
.В
качестве координаты вектора у можно
принять y = Н.
Структурная
схема, соответствующая уравнению (2,3),
представлена
на рис. 2.2
= Н.
Структурная
схема, соответствующая уравнению (2,3),
представлена
на рис. 2.2

14.Начальная и рабочая информация о сау. Классификация сау на основе характеристик начальной и рабочей информации. Основные принципы регулирования
Основные принципы регулирования
Принцип по управлению
Принцип по возмущению
Принцип комбинирования
Принцип адаптации
Принцип автоматического управления определяет, как и на основе, какой информации формировать управляющее воздействие в системе. Система регулирования состоит из регулятора и объекта:
Регулятор ↔ система ↔ объект
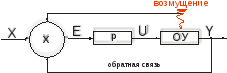
Принцип по управлению (Ползунова-Ватта)
Обратная
связь –
связь, при которой информация о состоянии
объекта передаётся с выхода системы на
вход управляющего устройства.
Управляющее воздействие вырабатывается на основе информации об отклонение величины от требуемого значения. Для управления по отклонению необходимо наличие обратной связи. U=F(e)
Недостатки: Сначала что-то должно произойти, т.е. сначала произойдёт отклонение, а потом уже принимаются меры по его исправлению. Для подачи будущего сигнала.
Достоинства: менее чувствительны к изменению параметров элементов системы.
Принцип по возмущению (Понселе)
В
электротехнике – компаундирование.

Управляющее воздействие вырабатывается в зависимости от результатов измерения возмущения, действующего на объект. Данные схемы не имеют обратных связей. U=F(f)
Недостатки: применение принципа ограничено объектами, характеристики которых известны (можно определить). Неконтролируемые возмущения не компенсируются.
Достоинства: применимо быстрый принцип.
Принцип комбинирования
В технике широко применяется. В комбинированных системах принцип управления по отклонению реализуется с помощью обратной связи, а принцип по возмущению – с помощью компенсационных связей. U=F(f,e)
Недостатки: сочетаются недостатки двух предыдущих принципов.
Достоинства: сочетаются достоинства двух предыдущих принципов.
Принцип адаптации

УАС – устройство анализа сигнала
УАО – устройство анализа объекта (для оценки изменяющихся динамических характеристик управляющего объекта)
АУУ – автоматическое управляющее устройство
ВУ – вычислительное устройство (определяет способ изменения характеристик основного управляющего устройства)
ИУ – исполнительное устройство (исполняющие устройства «самонастройка»)
n(t) – возмущение, ошибка
Основная система построена по принципу отклонения. Используются дополнительные устройства в виде «самонастройки». U=F(Xвх.,Y,U,t,n)