

29. Передаточные функции сау при различных способах соединения
звеньев.
При исследовании САУ её можно разбить на комбинацию динамических звеньев с определёнными передаточными функциями.
В системах автоматического управления используются следующие соединения динамических звеньев: последовательное, параллельное и соединение с обратной связью (встречнопараллельное).

При определении скалярных функций сложных систем их можно выражать через передаточные функции звеньев, из которых состоит система. Для этого необходимо знать правила определения передаточных функций последовательных и параллельных соединений, а также соединений с обратной связью.
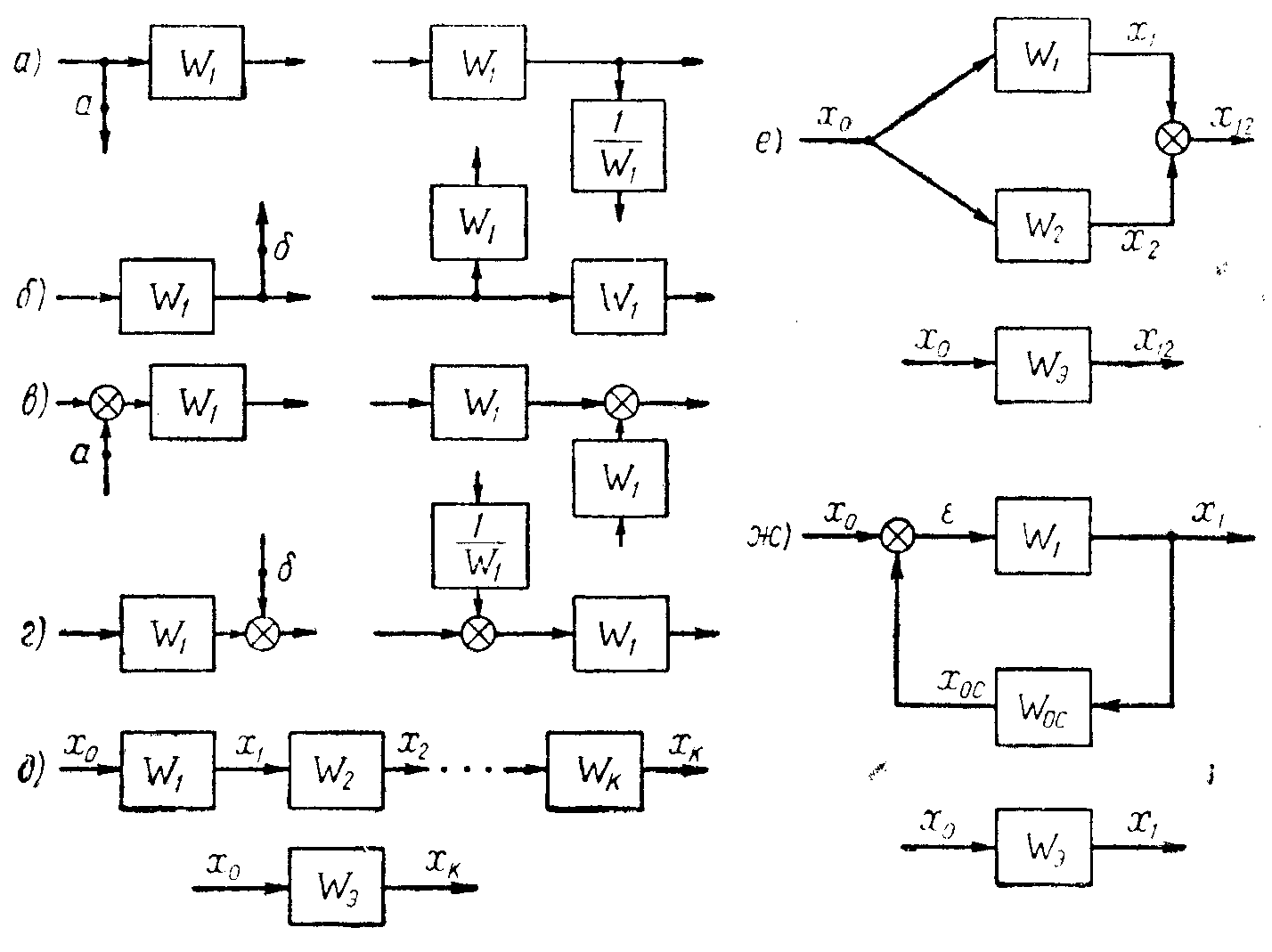
При последовательном соединении звеньев структура аналогична изображенной на рис. 1.4, а, только теперь сигналы и передаточные функции являются скалярами:
W (s) = Y2 (s)/t/, (s) = W{ (s) W2 (s) = W2 (s) Wx (s).
При параллельном соединении (рис. 1.4,6)
W(s) = Y (s)/t/, (s) = W, (s) + W2 (s).
Для соединения с обратной связью (рис. 1.4, в)
W (s) = У, (s)/G (s) = Wx (s)/\ 1 ± Wi (s) W2 (s)].
Знак плюс в знаменателе соответствует отрицательной обратной связи, знак минус — положительной.
30. Правила преобразования структурных схем сау.
Один из способов определения передаточных функций системы состоит в следующем: сложное соединение с помощью структурных преобразований приводят к одной из рассмотренных простейших схем и затем вычисляют общую передаточную функцию.
В большинстве случаев САУ можно привести к последовательному соединению типовых звеньев, образующих замкнутую цепь. Такие САУ называются одноконтурными. Другие САУ приводятся к комбинации последовательно и параллельно соединённых звеньев и называются многоконтурными.
Правила эквивалентных структурных преобразований. Исследование автоматических систем по одноконтурным схемам проще, чем по многоконтурным. Поэтому многоконтурные схемы преобразуются к одноконтурным. Преобразование схем связано с заменой отдельных блоков более простыми, перестановкой узлов и сумматоров через звенья по ходу и против хода сигналов, с их взаимной перестановкой. Однако при любых преобразованиях структурных схем свойств систем должны сохраняться.

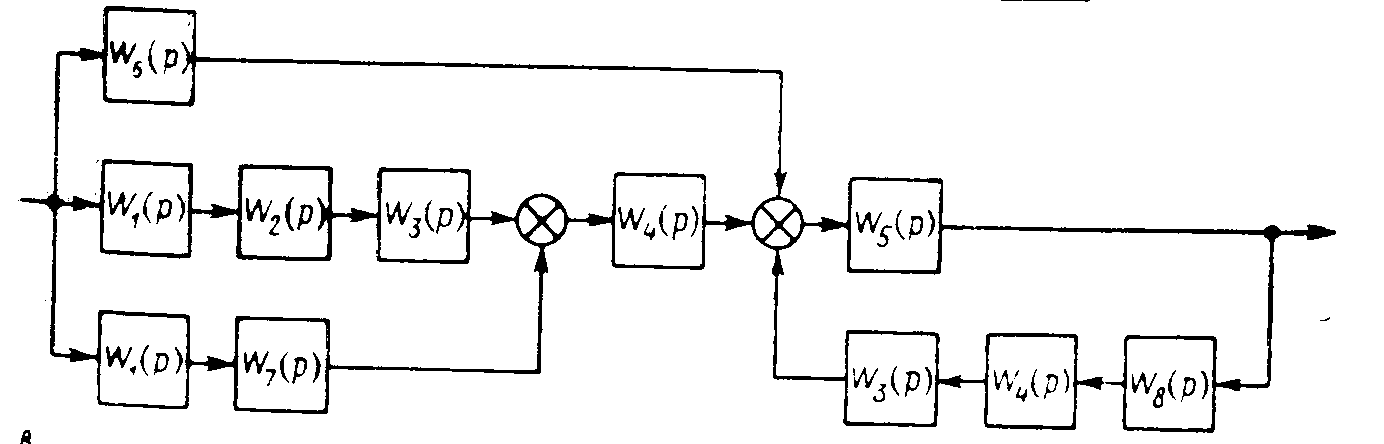

Рассмотрим пример преобразования структурной схемы САУ, в которой устраняются перекрещивающиеся прямые и обратные связи (рис. 2.13, а).
Преобразование начинается с переноса назад входа нижней параллельной ветви и переноса вперед выхода ветви обратной связи (рис. 2.13, Г, Далее объединяются в одно звено цепи, параллельные звеньям №i(p), W2{p W3(p), WA(p), и в другое звено —ветвь звена №5(р) с цепью обратной связи. После этого может быть написано выражение общей передаточной функции САУ, приведенной к одному эквивалентному звену (рис. 2.13, в).
31.Порядок составления дифференциальных уравнений движения сау.
Прежде чем составлять дифференциальное уравнение системы, необходимо разобраться в принципе ее действия и на основании этого
-составить функциональную структурную схему системы, т. е. представить систему в виде взаимно связанных элементов, каждый из которых выполняет свою функцию.
- для каждого элемента системы следует составить дифференциальное уравнение динамики, связывающее выходную величину со входными*. -Количество таких уравнений должно равняться числу зависимых переменных, что является необходимым (но недостаточным) признаком правильности составления уравнений.
-исключив промежуточные переменные (из-за связи между элементами системы выходная величина одного из них является входной величиной другого или нескольких других), можно, наконец, получить одно дифференциальное уравнение, в котором независимыми переменными являются внешние воздействия и время, а зависимой переменной — управляемая величина или ошибка системы.
Уравнения динамики принято записывать таким образом, чтобы выходная величина и все её производные находились в левой части уравнения, а входные величины и их производные – в правой части уравнения.
Уравнение динамики считается написанным в нормальной форме, если выходная величина элемента входит в преобразованное уравнение с коэффициентом, равным единице.
Зная передаточные функции элементов САУ, можно получить передаточную функцию, а по ней частотные и временные характеристики всей системы.
(32-37). Понятие устойчивости линейных непрерывных САУ. Критерии
устойчивости.
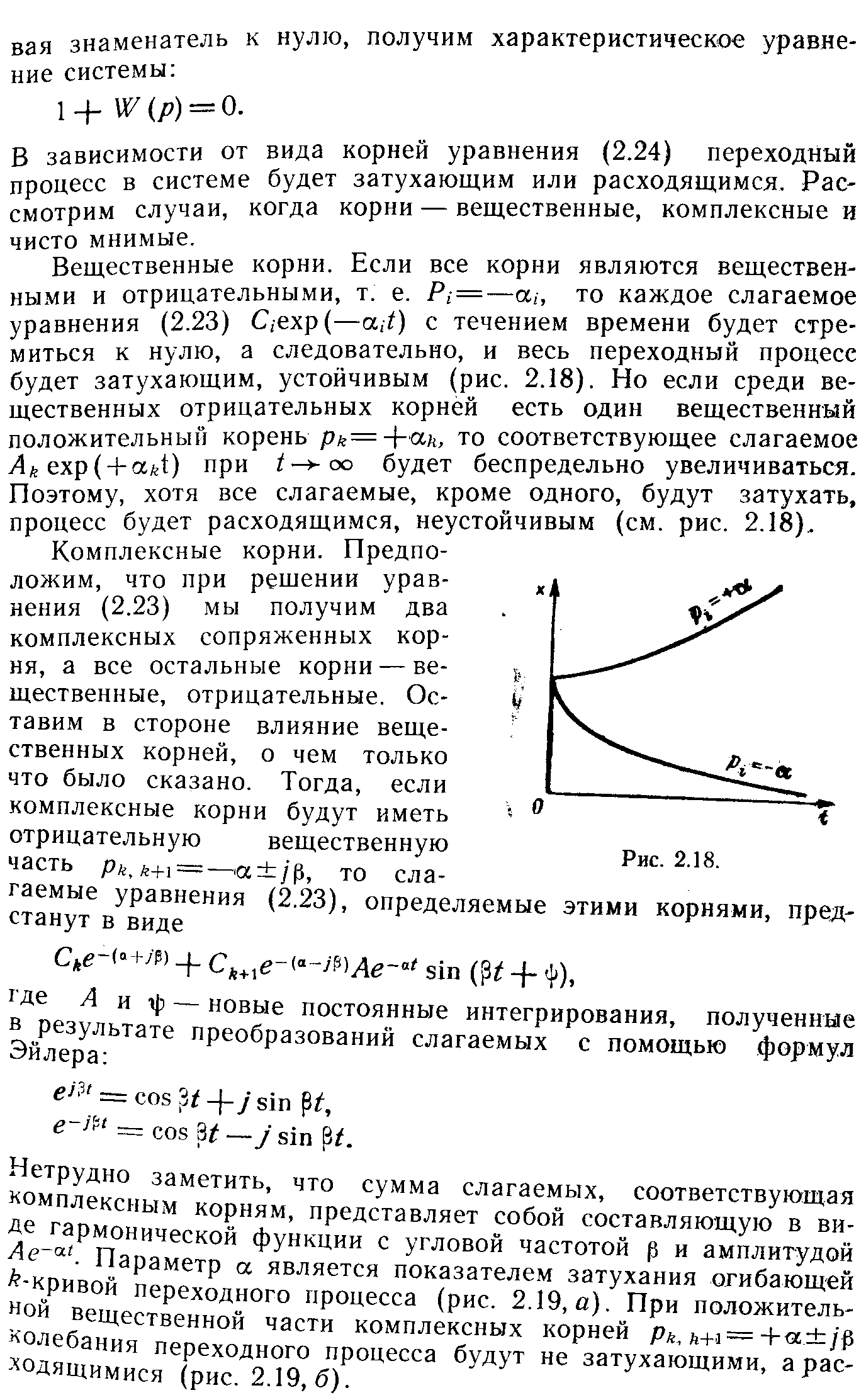
Любая САУ характеризуется переходным процессом, который возникает в ней при нарушении состояния равновесия вследствие какого-либо воздействия. Переходный процесс х(t) зависит как от свойств системы, так и от вида возмущающего воздействия. В переходном процессе различают две составляющие:
![]()
первая из них выражает вынужденные движения, определяемые возмущающим воздействием и свойствами системы; вторая — свободные движения системы, определяемые начальными условиями и свойствами самой системы.
Основной динамической характеристикой САУ является ее устойчивость. Под устойчивостью понимается свойство системы возвращаться к состоянию установившегося равновесия после устранения возмущения, которое вывело ее из этого состояния. Физическую трактовку понятия устойчивости можно пояснить следующим примером. Если шар помещен в верхнюю точку возвышенности (рис. 2.17, я), то система неустойчива, поскольку при малейшем отклонении шара от начального положения он скатится по склону поверхности и не возвратится в исходное положение. Если же шар помещен во впадине (рис 2.17,6), то система устойчива: после отклонения шар обязательно возвратится к первоначальному положению. В обеих ситуациях устойчивость и неустойчивость системы не зависят от величины начальных отклонений шара. Однако возможны случаи, когда система при малых отклонениях будет устойчива, а при больших—неустойчива, например, если шар находится во впадине, а впадина расположена на вершине выпуклой поверхности (рис. 2.17,0). Принято считать, что такая систем; устойчива в малом и неустойчива в большом, поскольку устойчивость связана с величиной начального отклонения.

Система автоматического
управления будет устойчива, если в
переходном процессе свободная составляющая
с течением времени стремится к нулю, т.
е. если
![]() .
При невыполнении этого условия САУ
считается неустойчивой.
.
При невыполнении этого условия САУ
считается неустойчивой.
Свободное движение системы определяется однородным дифференциальным уравнением

Здесь хсв — свободное движение системы, которое определяет динамическую ошибку; а0, аь .. ., ап — постоянные коэффициенты, которые определяются параметрами системы. Уравнение (2.22) имеет решение в виде

где Сь С2, . . ., Сп — постоянные интегрирования, определяемые из начальных условий; рь р2, . .., рп — корни характеристического уравнения системы
![]() (2.24] полученного
на основании дифференциального
уравнения (2.22).
(2.24] полученного
на основании дифференциального
уравнения (2.22).
Если для разомкнутой САУ известна передаточная функция W(P), то для замкнутой системы передаточная функция будет иметь вид
Ф(Р) = W(P)/(1+ W(P))
Откуда, приравни -







В большинстве случаев для нормальной работы САУ запас устойчивости по фазе составляет около 30°- 60°, а за. по амплитуде—(6-—20) дБ. При оценке устойчивости может считаться достаточным, если отрезок характеристики, пересекающей ось частот с наклоном —20 дБ на декаду, охватывает область частот не менее 0,75 декады.
Исследование устойчивости многоконтурных систем. Большинство реальных САУ имеют не один, а несколько контуров обратной связи, которые улучшают динамические свойства систем. Система, таким образом, становится многоконтурной Управление несколькими параметрами также может быть реализовано многоконтурными системами. Кроме того, с многоконтурными системами сталкиваются при проектировании сложных САУ, состоящих из нескольких взаимодействующих друг с другом следящих систем и систем стабилизации. Анализ устойчивости многоконтурных САУ обычно сложнее, одноконтурных. Одна из основных причин этого — то, что передаточные функции многоконтурных САУ с разомкнутой главной обратной связью не являются произведением простых множителей.
Весьма часто многоконтурные САУ можно упростить, преобразовав их структурные схемы с помощью приемов, рассмотренных ранее. В этом случае исследование устойчивости можно произвести упомянутыми методами. Однако более o6щий метод исследования устойчивости многоконтурной САУ основан на том, что сначала система анализируется известными методами в полностью разомкнутом состоянии, а затем — при последовательном включении каждой из обратных связей, имеющихся в системе.
Необходимо подчеркнуть, что возможны случаи, при которых САУ, устойчивая в своем окончательном рабочем состоянии, может быть неустойчивой, если некоторые из её внутренних обратных связей разомкнуты.
Структурная устойчивость.
Иногда оценить устойчивость САУ можно по ее структуре. Это исключает необходимость составления и решения характеристического уравнения системы. Если система имеет структуру, при которой невозможно обеспечить устойчивость ни каких значениях параметров ее элементов, то она называется структурно-неустойчивой. Примером таких систем могут служить системы, которые имеют два интегрирующих звена.
Предположим, что система, состоящая из одного aпериодического и двух интегрирующих звеньев, имеет передаточную функцию
![]()
а характеристическое уравнение замкнутой системы
Tp3+p2+k=0
Для этого уравнения необходимое условие устойчивости не выполняется ни при каких значениях параметров T и k, следовательно, система будет структурно-неустойчивой.
Структурно-неустойчивую систему можно превратить в устойчивую, только лишь изменив ее структуру, т. е. введением отрицательных обратных связей. Следовательно, в ряде случаев при анализе и синтезе САУ можно заранее отбросить варианты со структурно-неустойчивыми системами. Это особенно существенно при проектировании сложных САУ.