

10. Объект управления. Векторы воздействий и состояний объекта, их
обозначения. Односвязные и многосвязные объекты управления.
Состояние объекта определяется рядом величин, характеризующих как воздействие на объект внешней среды и управляющих устройств, так и протекание процессов внутри самого объекта.
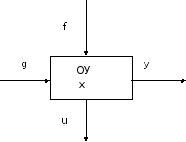
Рис. 3.2. Функциональная схема воздействий на объект управления.
f = f ( f1, f2, … fk ) - неконтролируемые возмущения;
g = g (g1, g2, … gr ) – контролируемые возмущения;
u = u (u1, u2, … us) – управляющие воздействия;
x = x (x1, x2, … xn ) – переменные состояния (фазовые координаты объекта);
y = y (y1, y2, … ym ) – выходные (наблюдаемые) переменные;
Контролируемые величины, характеризующие состояние объекта, по которым ведётся управление, называются управляемыми, или регулируемыми величинами.
Величины, выражающие внешние влияния на объект называются воздействиями.
Воздействия, вырабатываемые управляющим устройством или задаваемые
человеком, называются управляющими воздействиями.
Воздействия, не зависящие от системы управления, называются возмущениями.
Возмущения можно разделить на два вида: а) нагрузка, б) помехи.
В общем случае управляющие, возмущающие воздействия и состояния объекта – векторы.
Если объект характеризуется одной управляющей и одной управляемой величиной, то векторы u и y имеют по одной координате, и объект называется простым или односвязным (одномерным).
При наличии нескольких взаимосвязанных координат векторов u и y объект называется многосвязным (многомерным).
Управление, осуществляемое без участия человека, называют автоматическим, а техническое устройство, выполняющее в этом случае функции управления,— автоматическим управляющим устройством или контроллером; объект управления и контроллер во взаимодействии друг с другом образуют систему автоматического управления.
Системы автоматического управления – чисто машинные комплексы, построенные по законам автоматического регулирования и применяемые главным образом для управления технологическими и производственными процессами, описание которых может быть полностью формализовано.
Система автоматического управления – совокупность управляемого объекта и управляющего устройства, взаимодействующих между собой в соответствии с законом (алгоритмом) управления.
Функциональная схема САР.
Простейшая функциональная структурная схема системы управления показана на рис.3.3 Здесь контроллер КН, получая информацию о цели управления в виде меняющегося во времени t сигнала задания x(t), формирует управляющее воздействие u(t) на объект ОБ таким образом, чтобы управляемая величина у(t) менялась в соответствии с изменением x(t), т. е. так, чтобы достигалась цель управления:
![]()
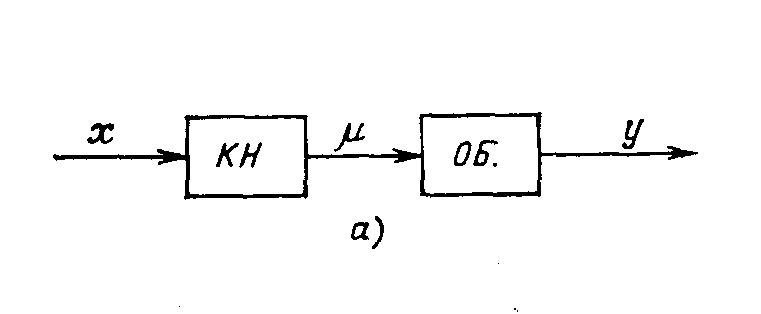
Рис.3.3. Функциональная схема системы автоматического управления.
Очевидно, что подобная система управления может реально функционировать только тогда, когда между изменением y(t) и вызвавшим его изменением \x(t) в объекте существует однозначное соответствие. Это соответствие отражается в математической модели объекта, которая предполагается заранее известной и может быть использована для определения алгоритма функционирования контроллера (алгоритма управления). Этот алгоритм определяет, как следует изменять управляющее воздействие u(t) в зависимости от изменения x(t) для того, чтобы была достигнута цель управления.
Информацию о математической модели объекта, используемую для проектирования алгоритма функционирования контроллера, называют априорной (начальной) информацией об объекте управления.
Практически рассмотренная структура системы управления может функционировать только при выполнении следующих довольно жестких условий: на объект управления не действуют никакие возмущения; математическая модель объекта известна для любого момента времени с достаточно высокой точностью; требуемый алгоритм управления может быть реализован в контроллере с достаточно высокой точностью.
Нарушение хотя бы одного из этих условий приведет к появлению неконтролируемого самопроизвольного отклонения управляемой величины от желаемого значения, причем с течением времени это отклонение может стать сколь угодно большим.
В этом случае в структуру системы управления приходится вводить добавочный канал, по которому контроллер получает информацию о действительном значении управляемой величины в каждый момент времени; это позволяет контроллеру при появлении отклонения от желаемого значения (независимо от того, какой причиной оно вызвано) осуществить добавочное изменение управляющего воздействия на объект так, чтобы это отклонение было ликвидировано.

Рис. 3.4. Функциональная схема замкнутой системы автоматического
управления.
Соответствующая информационная структурная схема системы приведена на рис.3.4; канал, по которому информацию с выхода системы об изменении управляемой величины подается на вход контроллера, называют каналом обратной связи, или просто обратной связью. На этой схеме, помимо управляющего воздействия на объект ц (t), показаны также возмущающие воздействия X (t), число которых может быть неопределенно большим; среди них могут быть и недоступные для контроля.
В процессе работы контроллер получает текущую информацию о цели управления, а также информацию о текущем состоянии объекта и среды его функционирования и в соответствии с этой информацией (которая называется рабочей) формирует управляющие воздействия на объект так, чтобы была достигнута цель управления.
В системе с обратной связью (рис. 3.4) имеется замкнутый контур циркуляции сигналов; поэтому такие системы получили также название замкнутых систем управления. Соответственно систему управления без обратной связи (рис.3.3) называют разомкнутой.
На практике, особенно при управлении технологическими (и в том числе теплоэнергетическими) процессами, сформулированные выше условия применимости разомкнутых систем управления почти никогда не выполняются, так что реальные системы управления обычно имеют в своей структуре замкнутые контуры.
В зависимости от характера изменения сигнала задания (задающего воздействия) системы управления принято разделять на три вида:
1. Стабилизации, если задающее воздействие не меняется во времени.
2. Программного управления, если задающее воздействие является заранее известной (детерминированной) функцией времени.
3. Зависимого управления, или следящей, если задающее воздействие является неопределенной в будущем функцией времени, т. е. такой функцией, характер изменения которой в будущем нельзя прогнозировать или в лучшем случае можно прогнозировать лишь с определенной степенью вероятности.