

Курс лекций по дисциплине
МАЛОГАБАРИТНЫЕ ПЕРЕДАЧИ
Составитель: Проф. Борисенко Л.А Компьютерное оформление: Калеев Д.Н.
ЛЕКЦИЯ 1
ПОНЯТИЕ О МЕХАТРОНИКЕ

ПОНЯТИЕ О МЕХАТРОНИКЕ
Мехатроника – это новое динамично развивающееся направление современной науки, техники и технологий, определяющее технический облик 21 века. Главная задача мехатроники- создание интеллектуальных машин, которые обладают качественно новыми функциями и свойствами. Исторически мехатроника развивается на базе робототехники, которая получила существенное развитие 70-80-х годах 20 века.
Рисунок 1.1 – Символ мехатроники
ЛЕКЦИЯ 2
Новые служебные и функциональные задачи мехатронных машин и систем
НОВЫЕ СЛУЖЕБНЫЕ И ФУНКЦИОНАЛЬНЫЕ ЗАДАЧИ МЕХАТРОННЫХ МАШИН И СИСТЕМ
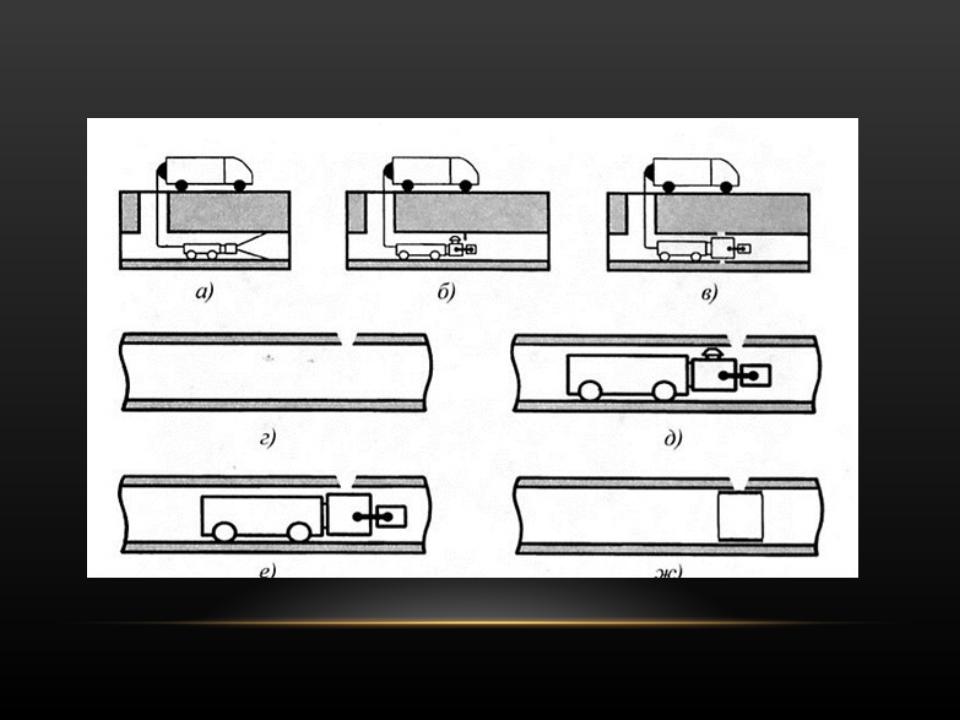
•Рисунок 2.1 – Схемы роботизированных операций: а- телеинспекция трубопроводов, б-подрезка выступающих элементов, в-заделка локального дефекта, г, - дефект в трубопроводе, д – зачистка с помощью инструментальной головки, е – установка бандажа, ж – трубопровод после бандажирования
НОВЫЕ СЛУЖЕБНЫЕ И ФУНКЦИОНАЛЬНЫЕ ЗАДАЧИ МЕХАТРОННЫХ МАШИН И СИСТЕМ
•Рисунок 2.2 – Манипулятор для осмотра внутренних поверхностей
НОВЫЕ СЛУЖЕБНЫЕ И ФУНКЦИОНАЛЬНЫЕ ЗАДАЧИ МЕХАТРОННЫХ МАШИН И СИСТЕМ
•Рисунок 2.3 – Робот – разведчик для АЭС

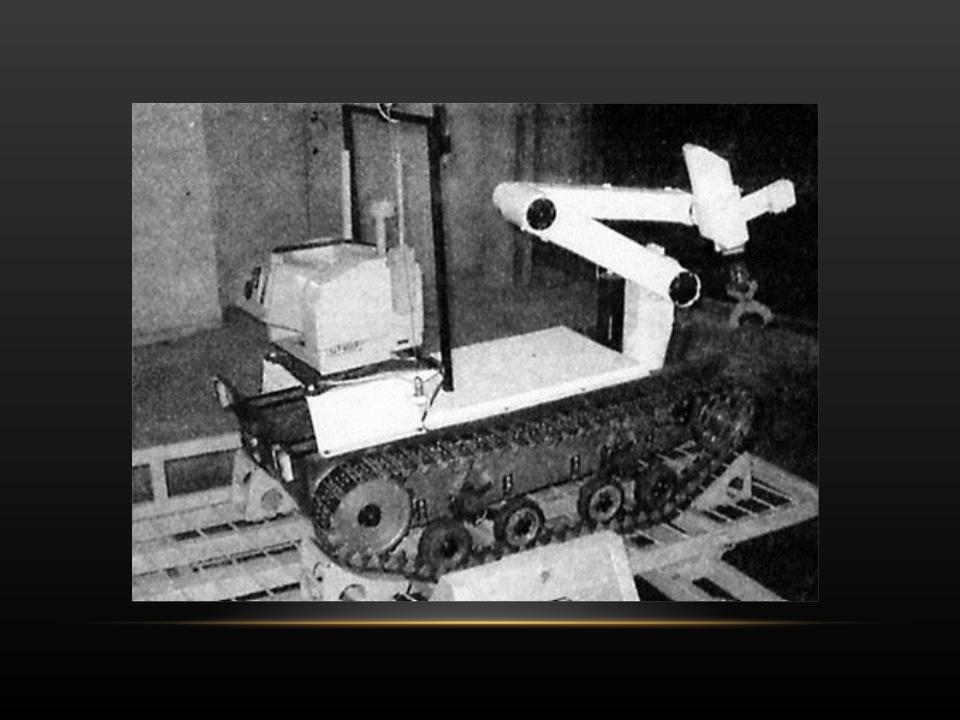
НОВЫЕ СЛУЖЕБНЫЕ И ФУНКЦИОНАЛЬНЫЕ ЗАДАЧИ МЕХАТРОННЫХ МАШИН И СИСТЕМ
•Рисунок 2.4 – Специальный робот «Вездеход ТМ-3»
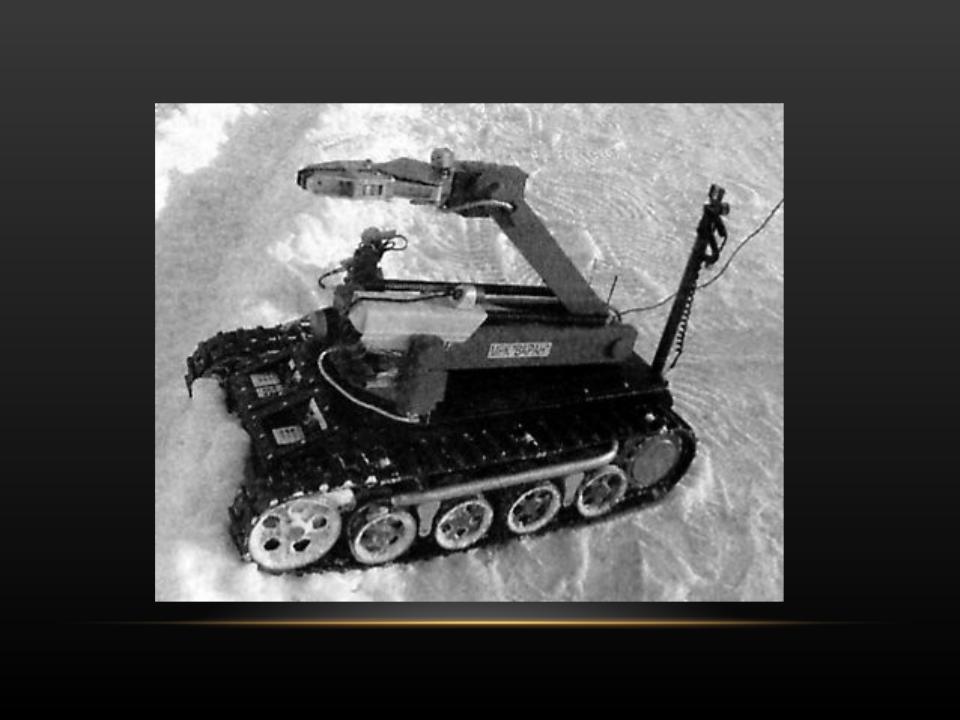
НОВЫЕ
•Рисунок 2.5 – Робот «Варан»
НОВЫЕ СЛУЖЕБНЫЕ И ФУНКЦИОНАЛЬНЫЕ ЗАДАЧИ МЕХАТРОННЫХ МАШИН И СИСТЕМ
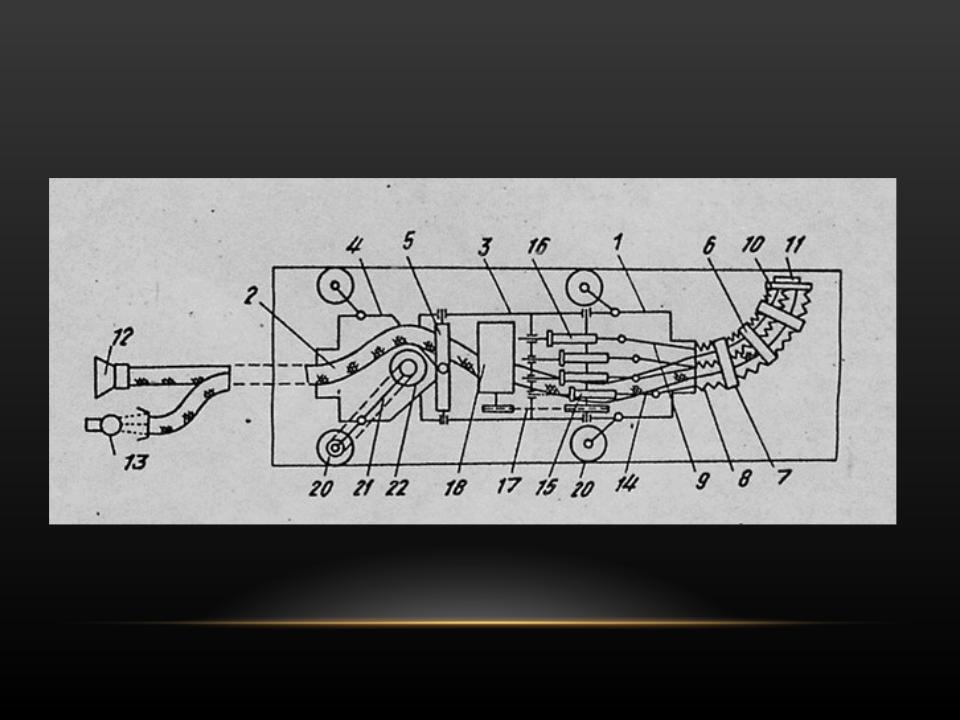
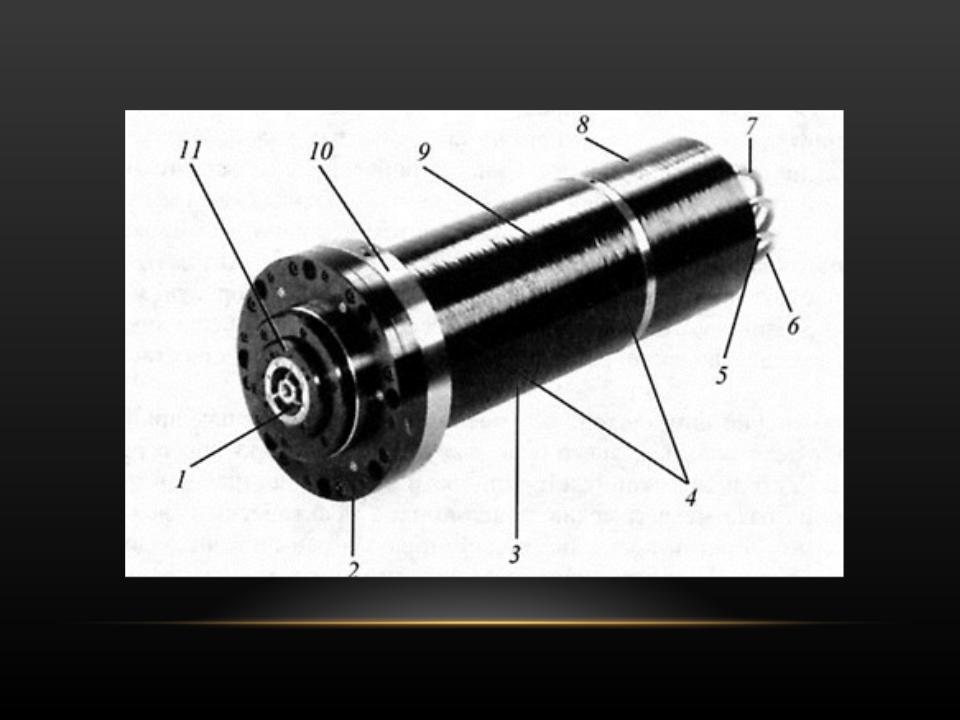
•Рисунок 2.6 – Мотор-шпиндель.
•1- интерфейс инструмента с продуувкой воздухом, 2-кольцо для внешнего охлаждения , 3- синхронный двигатель, 4- стальной или гибридный подшипник, 5- фотоимпульсный датчик, 6- сенсоры состояния зажима инструмента, 7- силовой кабель, 8- пневматическое устройство зажима инструмента, 9- закрытая рубашка охлаждения, 10- корпус с фланцем, 11- лабиринтное уплотнение с воздушной блокировкой