

ОСНОВЫ ПРОЕКТИРОВАНИЯ ЦЕПНЫХ ПЛАНЕТАРНЫХ РЕДУКТОРОВ С ВТУЛОЧНЫМИ И РОЛИКОВЫМИ ПРИВОДНЫМИ ЦЕПЯМИ

ОСНОВЫ ПРОЕКТИРОВАНИЯ ЦЕПНЫХ ПЛАНЕТАРНЫХ РЕДУКТОРОВ С ВТУЛОЧНЫМИ И РОЛИКОВЫМИ ПРИВОДНЫМИ ЦЕПЯМИ
Рисунок 10.5 – Схема планетарного редуктора с двумя звездочками.
ОСНОВЫ ПРОЕКТИРОВАНИЯ ЦЕПНЫХ ПЛАНЕТАРНЫХ РЕДУКТОРОВ С ВТУЛОЧНЫМИ И РОЛИКОВЫМИ ПРИВОДНЫМИ ЦЕПЯМИ
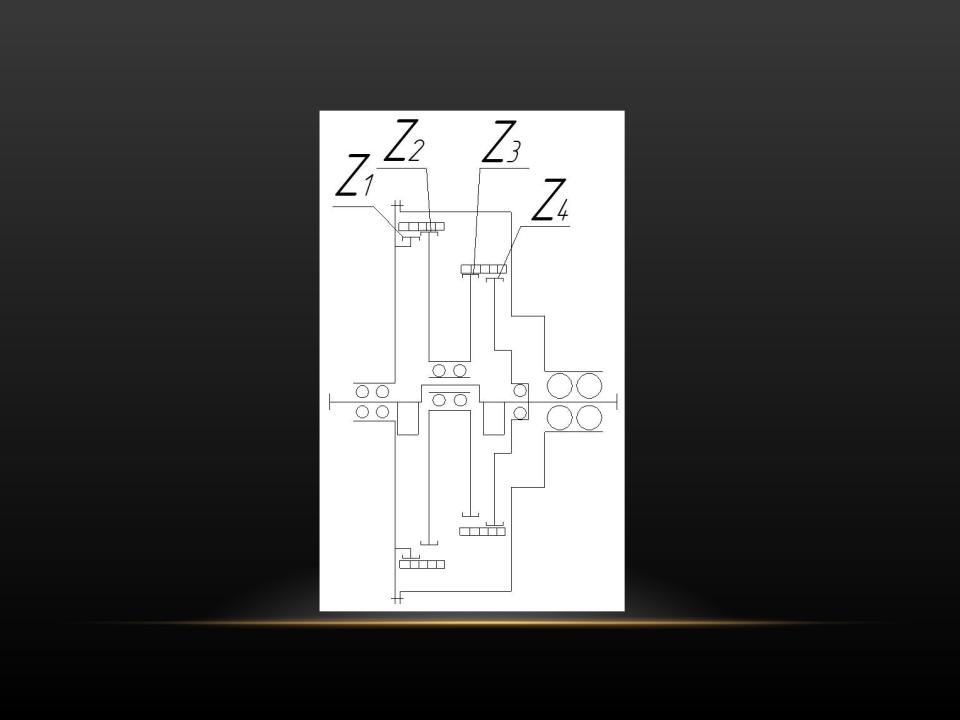
Рисунок 10.6 – Схема планетарного редуктора с четырьмя звездочками

ОСНОВЫ ПРОЕКТИРОВАНИЯ ЦЕПНЫХ ПЛАНЕТАРНЫХ РЕДУКТОРОВ С ВТУЛОЧНЫМИ И РОЛИКОВЫМИ ПРИВОДНЫМИ ЦЕПЯМИ
•Передаточное отношение обращенного механизма
• i H12 = -ωH / (ω2 – ωH ) = Z2 / Z1
• Разделим числитель и знаменатель на ω2 ,
• Обозначив
• iпл = ωH / ω2 ,
• получим
• i H12 = - iпл / ( 1 - iпл ),
• откуда следует формула для определения передаточного отношения двухколесного цепного планетарного механизма:
• iпл = i H12 / (i H12 - 1 ) = Z2 / Z1 / ( Z2 / Z1 -1). В зависимости от соотношения чисел зубьев звездочек выходной вал вращается в сторону вращения входного вала или в противоположном направлении. В частности , если Z2 > Z1, то передаточное отношение положительно, если Z2 < Z1 , то передаточное отношение отрицательно. Это обстоятельство может иметь существенное влияние на к.п.д. механизма.
•Заметим, что наличие разделенной звездочки Z1` обусловлено желанием иметь симметричное нагружение цепи для улучшения условий ее работы, что несколько усложняет конструкцию, однако в неответственных случаях или при больших числах зубьев звездочек можно использовать одновенцовую звездочку Z1 . Известно, что пластинчатая цепь успешно работает при перекосе на звездочках до 10 .
•Для четырехколесного планетарного механизма аналогичным путем можно вывести формулу для передаточного отношения :
• |
iпл = iH14 / (iH14 -1), где |
• iH14 = Z2 Z4 / Z1Z3 . |
|
Рисунок 10.7 – Расчеты

ОСНОВЫ ПРОЕКТИРОВАНИЯ ЦЕПНЫХ ПЛАНЕТАРНЫХ РЕДУКТОРОВ С ВТУЛОЧНЫМИ И РОЛИКОВЫМИ ПРИВОДНЫМИ ЦЕПЯМИ
Z1 |
Z2 |
Z3 |
Z4 |
Передаточное |
Примечание |
|
|
|
|
отношение |
|
35 |
34 |
22 |
23 |
65.166 |
реализован |
23 |
22 |
19 |
20 |
146.6 |
|
22 |
23 |
20 |
19 |
-145.6 |
|
23 |
22 |
18 |
19 |
104.5 |
|
34 |
35 |
23 |
22 |
- 64.16 |
|
19 |
20 |
23 |
22 |
146.6 |
|
22 |
23 |
19 |
18 |
-103.5 |
|
35 |
34 |
38 |
39 |
-331.5 |
|
21 |
20 |
18 |
19 |
190 |
|
23 |
22 |
20 |
21 |
231 |
|
22 |
23 |
21 |
20 |
-230 |
|
45 |
44 |
42 |
42 |
946 |
|
47 |
46 |
43 |
44 |
674.6 |
|
51 |
50 |
48 |
49 |
1225 |
|
53 |
52 |
50 |
51 |
1326 |
|
49 |
48 |
46 |
47 |
1128 |
реализован |
45 |
44 |
42 |
43 |
946 |
|
45 |
44 |
32 |
33 |
121 |
проект |
Рисунок 10.9 – Варианты цепных четырехколесных планетарных передач

ОСНОВЫ ПРОЕКТИРОВАНИЯ ЦЕПНЫХ ПЛАНЕТАРНЫХ РЕДУКТОРОВ С ВТУЛОЧНЫМИ И РОЛИКОВЫМИ ПРИВОДНЫМИ ЦЕПЯМИ
Рисунок 10.10 – Фотография силового узла передаточного механизма опытного образца цепного планетарного редуктора с передаточным отношением 65

ОСНОВЫ ПРОЕКТИРОВАНИЯ ЦЕПНЫХ ПЛАНЕТАРНЫХ РЕДУКТОРОВ С МЕЛКОМОДУЛЬНЫМИ ЗУБЧАТЫМИ ЦЕПЯМИ

ОСНОВЫ ПРОЕКТИРОВАНИЯ ЦЕПНЫХ ПЛАНЕТАРНЫХ РЕДУКТОРОВ С МЕЛКОМОДУЛЬНЫМИ ЗУБЧАТЫМИ ЦЕПЯМИ
Рисунок 10.11 – Принципиальная схема планетарной передачи с гибкой связью

ОСНОВЫ ПРОЕКТИРОВАНИЯ ЦЕПНЫХ ПЛАНЕТАРНЫХ РЕДУКТОРОВ С МЕЛКОМОДУЛЬНЫМИ ЗУБЧАТЫМИ ЦЕПЯМИ
Передаточное отношение этого механизма рассчитывается по формуле
i= (Z2 / Z1) / (Z2 / Z1 – 1),
где Z2– число зубьев сателлита, Z1 – число зубьев неподвижного колеса. В зависимости от соотношения чисел зубьев колес передаточное отношение может быть положительным или отрицательным. Обычно Z2< Z1, тогда i<0.
Рисунок 10.12 – Расчеты

ОСНОВЫ ПРОЕКТИРОВАНИЯ ЦЕПНЫХ ПЛАНЕТАРНЫХ РЕДУКТОРОВ С МЕЛКОМОДУЛЬНЫМИ ЗУБЧАТЫМИ ЦЕПЯМИ
Рисунок 10.13 – Расчеты