

Добавил:
Upload
Опубликованный материал нарушает ваши авторские права? Сообщите нам.
Вуз:
Предмет:
Файл:Борисенко / Лекции по дисциплине Малогаборитные передачи. Лекции 1-10 (все)..pps
СХЕМЫ И КОНСТРУКЦИИ МЕХАНИЗМОВ ОРИЕНТАЦИИ РАБОЧЕГО ОРГАНА МАНИПУЛЯТОРА
Рисунок 5.1 – Карданов подвес.

СХЕМЫ И КОНСТРУКЦИИ МЕХАНИЗМОВ ОРИЕНТАЦИИ РАБОЧЕГО ОРГАНА МАНИПУЛЯТОРА
Рисунок 5.2 – Механизм ориентации кисти с коническими дифференциалами.

СХЕМЫ И КОНСТРУКЦИИ МЕХАНИЗМОВ ОРИЕНТАЦИИ РАБОЧЕГО ОРГАНА МАНИПУЛЯТОРА
Рисунок 5.3 – Расчеты углов поворота, угловой скорости на выходе.

СХЕМЫ И КОНСТРУКЦИИ МЕХАНИЗМОВ ОРИЕНТАЦИИ РАБОЧЕГО ОРГАНА МАНИПУЛЯТОРА
Рисунок 5.4 – Двухколесный конический дифференциал (а) и его обращенная схема (б).

СХЕМЫ И КОНСТРУКЦИИ МЕХАНИЗМОВ ОРИЕНТАЦИИ РАБОЧЕГО ОРГАНА МАНИПУЛЯТОРА
Рисунок 5.5 – Расчёты.
СХЕМЫ И КОНСТРУКЦИИ МЕХАНИЗМОВ ОРИЕНТАЦИИ РАБОЧЕГО ОРГАНА МАНИПУЛЯТОРА
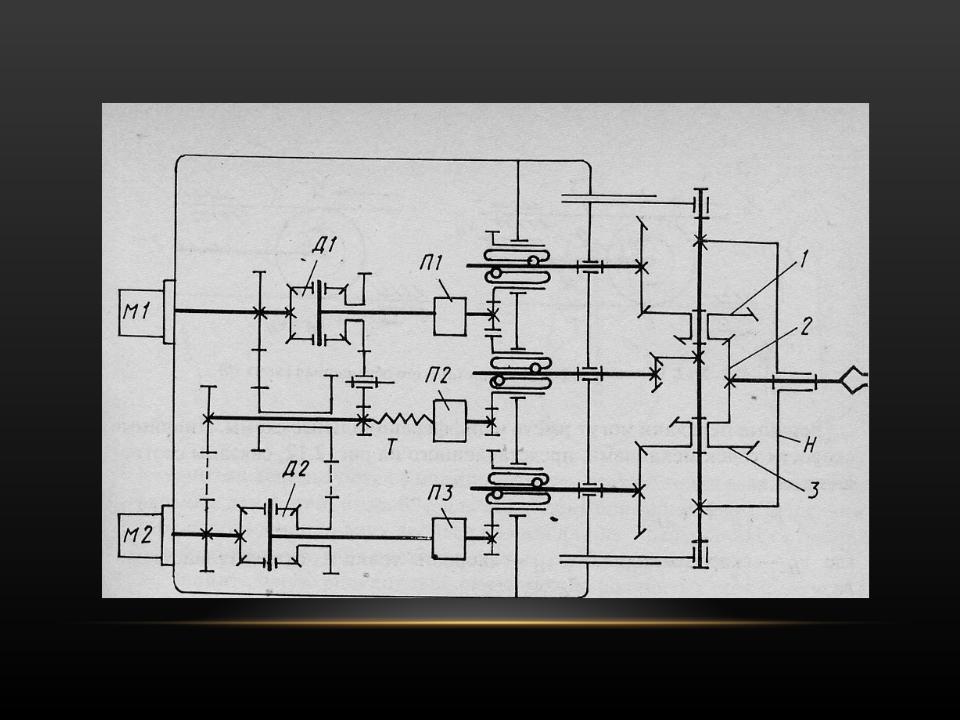
Рисунок 5.6 – Привод кисти промышленного робота «Универсаал-15».

СХЕМЫ И КОНСТРУКЦИИ МЕХАНИЗМОВ ОРИЕНТАЦИИ РАБОЧЕГО ОРГАНА МАНИПУЛЯТОРА
Рисунок 5.7 – Механизм ориентации с не ортогональными осями.

ЛЕКЦИЯ 6
СОВРЕМЕННЫЕ МЕХАТРОННЫЕ МОДУЛИ

СОВРЕМЕННЫЕ МЕХАТРОННЫЕ МОДУЛИ
Рисунок 6.1 – Планетарно-цевочный одноступенчатый редуктор.
Он состоит из гибкого колеса 1, электромагнитного генератора волн 2, жесткого колеса 3, гибкого подшипника 4, кулачка 5, зубчатого колеса 6 и выходного вала 7.

СОВРЕМЕННЫЕ МЕХАТРОННЫЕ МОДУЛИ
Рисунок 6.2 – Мотор-редуктор на основе волнового механизма.