

4.10.6 Влияние нестабильностей аппаратуры на эффективность систем сдц
Основными нестабильностями, влияющими на эффективность СДЦ при внутренней когерентности, являются:
нестабильность частоты импульсного генератора передатчика или изменение фазы от импульса к импульсу в усилителе мощности;
нестабильность частоты местного и когерентного гетеродинов;
неидеальность фазовой синхронизации когерентного гетеродина;
нестабильность длительности импульса;
нестабильность амплитуды зондирующих импульсов;
нестабильность периода повторения импульсов;
рассогласование задерживающего и прямого каналов в устройстве ЧПК.
Рассмотрим влияние перечисленных нестабильностей на эффективность работы систем СДЦ на базе устройства ЧПК с однократным вычитанием.
Нестабильность частоты импульсного генератора передатчика. При изменении частоты передатчика от импульса к импульсу усредненный за длительность импульса коэффициент корреляции сигналов на входе схемы вычитания устройства ЧПК
![]() (4.47)
(4.47)
где Δf − изменение частоты передатчика в интервале Тп (разность несущих частот смежных зондирующих импульсов); τи − длительность зондирующего импульса.
С учетом формулы (4.47) предельно достижимый коэффициент подавления
Кпп = 0,5 [1 − ρ(Тп)] = 0,5 [1 − (sin πΔf∙τи)/(π∙Δf∙τи)].
При условии π∙Δf∙tи << 1 последнее соотношение можно упростить sin x = (x − x3/6 +...):
Кпп = 3/(π2∙Δf2∙τ2и).
Если нестабильности носят случайный характер, то Δf необходимо заменить средним квадратическим значением sfг:
Кпп = 3/(π2∙σ2fг∙τ2и).
Из этого соотношения можно определить требования к стабильности частоты импульсного генератора передатчика:
![]() (4.48)
(4.48)
Если коэффициент подавления ПП определить как отношение мощности сигналов ПП на входе системы СДЦ к пиковой мощности нескомпенсированных остатков, то в выражение для сигналов Кпп следует подставить значение ρ(Тп) соответствующее концу импульса
ρк(Тп) = cos π∙Δf∙τи.
Так как
1 − cos 2π∙Δf∙τи = 2.sin2 π∙Δf∙τи ≈ 2π2∙Δf2∙τ2и ,
то коэффициент подавления в рассматриваемом случае Кпп = 1/(4π2∙σ2fг∙τ2и), откуда
![]() (4.49)
(4.49)
Нестабильность фазового сдвига в усилителе мощности. При наличии случайного фазового сдвига Δφ коэффициент корреляции отраженных сигналов в смежных периодах зондирования ρ(Тп) = cos Δφ. При малых значениях Δφ (1 − cosx = 2 sin2 (x/2))
Кпп = 0,5∙[1 − ρ(Тп)] ≈ 1/ Δφ2.
При независимых от зондирования к зондированию флюктуациях фазового сдвига в усилителе мощности из последнего соотношения следует
Кпп ≈ 1/ 2∙σ2φум , (4.50)
где σφум − среднее квадратическое значение фазового сдвига в усилителе мощности.
Из соотношения (4.50) можно определить требования к стабильности фазового сдвига в усилителе мощности:
![]() (4.51)
(4.51)
Нестабильность частоты местного и когерентного гетеродинов. Коэффициент межпериодной корреляции сигналов на входах схемы вычитания устройства ЧПК, обусловленный нестабильностью частот гетеродинов, определяется соотношением
ρгет(Тп) = cos 2π∙Δfгет(tr + τи),
где Δfгет – нестабильность частоты гетеродина в интервале Тп; tr – время запаздывания отраженного сигнала.
При tr > τи соотношение для Кпп будет иметь вид
Кпп = 1/[2∙(1 – ρ(Tп))] = 1/[2∙(1 – cos 2π∙Δfгет(tr – τи))] =
= 1/[2∙2 sin2 π∙Δfгет(tr – τи)] ≈ 1/(4π∙Δfгет∙tr)2. (4.52)
Требование к стабильности частот гетеродинов определяется соотношением
![]() (4.53)
(4.53)
Неидеальность фазовой синхронизации когерентного гетеродина. Влияние ошибок навязывания фазы зондирующего сигнала когерентному гетеродину на реализуемый коэффициент подавления аналогично влиянию нестабильности фазового сдвига в усилителе мощности. Поэтому
![]() (4.54)
(4.54)
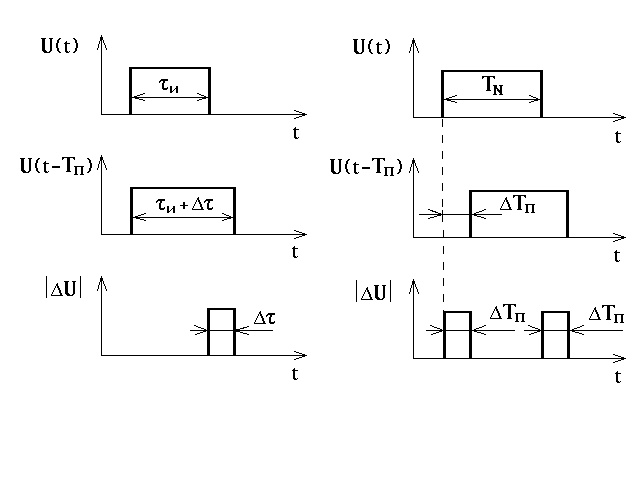
Нестабильность длительности импульса. Влияние этого вида нестабильности на качество подавления сигналов ПП иллюстрируется рис.4.61а.
а) б)
Рис.4.61. Влияние на качество подавления ПП:
а − нестабильности длительности импульса;
б − нестабильности периода повторения импульсов
Предельное значение Кпп в данном случае можно определить следующим образом:
Кпп = τ2и/ Δτ2и,
где Δtи − относительное изменение длительности зондирующего сигнала в смежных периодах зондирования.
Требование к стабильности длительности импульса при независимых флюктуациях определяется выражением
![]() (4.55)
(4.55)
где στи − среднее квадратическое отклонение длительности зондирующего сигнала от номинального значения.
Нестабильность амплитуды зондирующих импульсов. Предельное значение Кпп, обусловленное флюктуациями амплитуды зондирующих импульсов
Кпп = U2o/ ΔU2,
где Uo − номинальное значение амплитуды зондирующих импульсов; ΔU − относительное изменение амплитуды зондирующих импульсов в смежных периодах зондирования. При независимых флюктуациях дисперсия ΔU равна сумме дисперсий амплитуд смежных зондирующих импульсов.
Требование к стабильности амплитуды определяется выражением
![]() (4.56)
(4.56)
Нестабильность периода повторения импульсов. Этот вид нестабильности приводит к появлению на выходе устройства ЧПК нескомпенсированных остатков в виде двух импульсов (рис.4.61,б) длительностью ΔТп, равной разности смежных периодов повторения зондирующих импульсов. На выходе двухполупериодного выпрямителя образуется два импульса одной полярности общей длительностью 2ΔТп.
Следовательно, предельное значение коэффициента подавления, обусловленное изменение периода (частоты) повторения:
Кпп = τ2и / 4 ΔТ2п.
Требование к стабильности периода повторения определяется выражением
![]() (4.57)
(4.57)
Рассогласование задерживающего и прямого каналов в устройстве ЧПК. Временное рассогласование задерживающего и прямого каналов в устройстве ЧПК приводит к таким же результатам, что и изменение периода повторения. Поэтому требование к стабильности задержки в УЛЗ определяется соотношением (4.57).
В качестве факторов, снижающих Кпп, помимо перечисленных выше, следует учитывать:
флюктуации отраженных сигналов за счет взаимного перемещения элементарных источников ПП и вращения антенны;
расширение спектра флюктуаций из-за ограничения сигналов ПП в приемном тракте до схемы вычитания устройства ЧПК.
Методика учета нестабильностей. Все рассмотренные факторы, влияющие на качество подавления ПП, являются независимыми, и результирующий коэффициент подавления может быть найден следующим образом:
 (4.58)
(4.58)
где ρi − частный коэффициент корреляции сигнала на входе устройства ЧПК, учитывающий влияние i-го фактора, снижающего Кпп.
Соотношение (4.58) представим в виде
где 1 − Δρi = ρi.
При достаточно больших частных коэффициентах корреляции (случай, представляющий практический интерес)
![]()
поэтому
![]()
Из последнего соотношения следует
![]() (4.59)
(4.59)
где Кпп i − предельно достижимый коэффициент подавления ПП за счет i-го фактора.
Нетрудно показать, что соотношение (4.59) справедливо для систем СДЦ с любой кратностью вычитания. Его можно использовать для расчета коэффициента подавления, реализуемого в реальных системах СДЦ.