

4.5 Устройства защиты рлс от импульсных помех
На работу РЛС обнаружения могут оказывать влияние следующие виды импульсных помех:
хаотические импульсные помехи (ХИП);
ответные импульсные помехи (ОИП);
взаимные импульсные помехи (ВИП).
При воздействии ХИП полезный сигнал маскируется хаотически перемещающимися по экрану индикатора импульсами помехи.
ОИП предназначены для внесения ложной радиолокационной информации. Основным видом ОИП является многократные ответные помехи, создаваемые путем переизлучения зондирующего сигнала с размножением и задержкой.
При достаточно близком взаимном расположении РЭС излучаемые сигналы проходят в приемные тракты соседних РЛС и создают на экранах индикаторов так называемые ВИП. Для защиты РЛС от импульсных помех используются различия импульсных помех и полезных сигналов: спектральные; амплитудные; пространственные; поляризационные и т.д.
4.5.1 Устройства защиты от узкополосных импульсных помех
Для защиты РЛС от узкополосных импульсных помех можно использовать в приемном канале фильтры верхних частот, обеспечивающие подавление частот от нуля до некоторой граничной частоты. Короткие импульсы, имеющие спектр частот, значительно выходящей за граничную полосу фильтра, проходят с некоторым ослаблением, в то время как длительная помеха, обладающая более узким спектром, будет в значительной мере подавлена (рис.4.27,а). В качестве фильтра верхних частот можно использовать дифференцирующую цепочку или усилитель с быстродействующей регулировкой усиления (БАРУ).
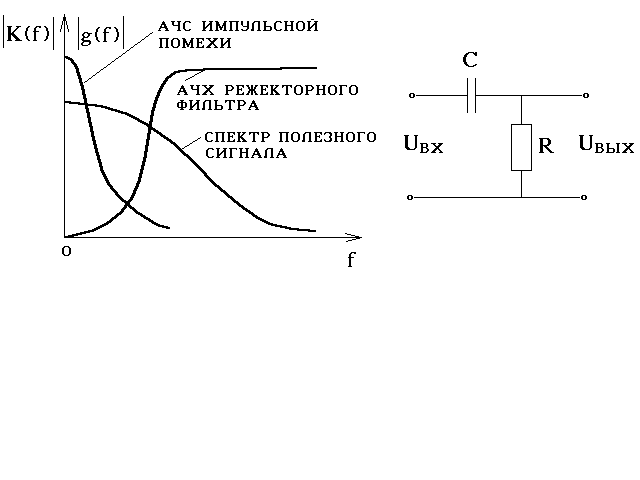
а) б)
Рис.4.27. Иллюстрация принципа защиты РЛС от узкополосных импульсных помех (a) и схема дифференцирующей цепочки (б)
Дифференцирующая цепочка (рис.4.27,б). Амплитудно-частотная характеристика дифференцирующей цепочки определяется соотношением
![]() (4.22)
(4.22)
где τo = RC.
Используя
формулу (4.22), можно показать, что при
прохождении через дифференцирующую
цепочку прямоугольных видеоимпульсов
их мощность уменьшается в
раз (здесь τи − длительность импульса). С учетом этого выигрыш в отношении сигнал/помеха при использовании дифференцирующей цепочки составляет
где τс, τп − длительность сигнального и помехового импульсов соответственно.
На рис.4.28 представлены графики, иллюстрирующие эффективность рассматриваемого устройства защиты в зависимости от параметров RC цепочки и соотношения длительностей полезного и помехового импульсов. Видно, что достаточно высокая эффективность защиты от узкополосных импульсных помех обеспечивается при выполнении условия (3-5)τ с < τo < (0,1-0,2)τ п.
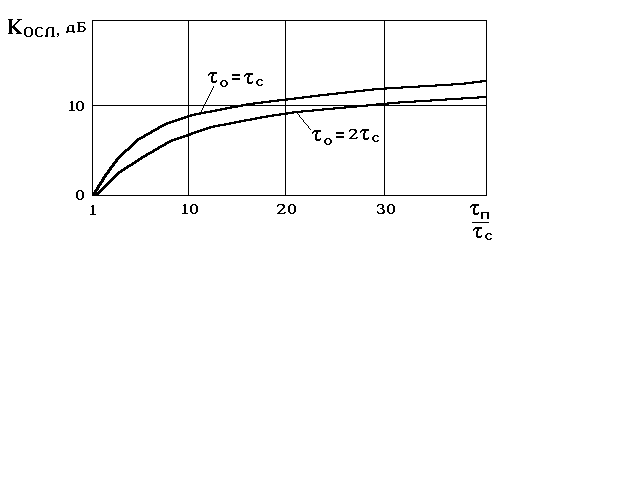
Рис.4.28. Зависимость отношения сигнал/помеха на выходе дифференцирующей цепи от параметров цепи и длительностей полезного и помехового сигналов
Усилитель с БАРУ (рис.4.29). Принцип работы БАРУ аналогичен принципу работы инерционной АРУ. Разница между ними состоит в скорости срабатывания. Скорость изменения усиления системы БАРУ должна соответствовать скорости изменения амплитуды импульсной помехи. Вместе с тем БАРУ не должна реагировать на полезные сигналы. В этом смысле усилитель с БАРУ эквивалентен фильтру верхних частот.
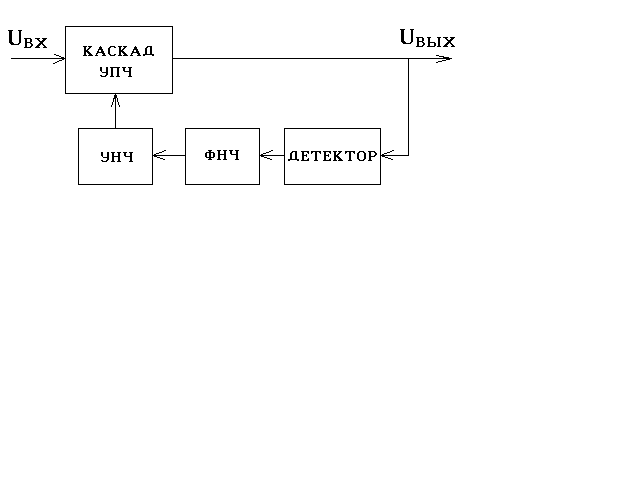
Рис.4.29. Схема усилителя с БАРУ
Малая постоянная времени цепи обратной связи накладывает существенный отпечаток на схемное решение системы БАРУ. По соображениям устойчивости не представляется возможным охватить малоинерциальной обратной связью регулируемый усилитель с большим коэффициентом усиления. Поэтому цепь БАРУ должна воздействовать лишь на один каскад УПЧ. Поскольку регулировкой одного каскада УПЧ не удается обеспечить требуемый диапазон регулирования, приходится охватывать отдельными цепями БАРУ несколько каскадов УПЧ.
Скорость срабатывания данной схемы и степень подавления помехи определяется величиной постоянной времени фильтра.