

5.3.2 Цифровые обнаружители радиолокационных сигналов при многоуровневом квантовании
При многоуровневом квантовании обнаружитель некогерентных сигналов включает в себя вычислитель модуля (амплитуды) выборок входного сигнала, цифровой накопитель и цифровой компаратор, а также устройство стабилизации уровня ложных тревог (СУЛТ).
Вычислитель модуля.
С помощью вычислителя модуля получают код огибающей входных сигналов для сокращения аппаратурных затрат в РЛС, имеющей квадратурные каналы. В общем случае значение модуля n-й выборки входного сигнала
![]() (5.6)
(5.6)
где x1(n) и x2(n) − сигналы на выходах АЦП квадратурных каналов (коды). Вычисление модуля в соответствии с (5.6) требует значительных аппаратурных затрат, вызванных необходимостью осуществления операций умножения. Поэтому на практике используют приближения вида
 (5.7)
(5.7)
Операция (5.7) осуществляется простым логическим устройством (рис.5.13), так как умножение на коэффициент 0,5 выполняется путем сдвига кода числа на один разряд вправо (в сторону младших разрядов). Потери при замене операции (5.6) операцией (5.7) не превышают 0,5 дБ.
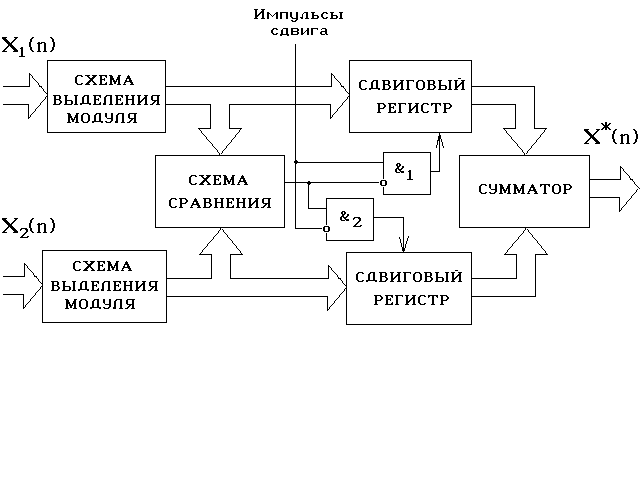
Рис.5.13. Вычислитель модуля
Схема выделения модуля сигнала в квадратурном канале представляет собой преобразователь из обратного или дополнительного кодов в прямой с последующей заменой (если это необходимо) значений знакового разряда с 1 на 0.
Схема сравнения может быть выполнена на базе сумматора, осуществляющего вычитание сигналов квадратурных каналов. В зависимости от знака разности разрешающий потенциал подается либо на схему &1 либо на схему &2, через которые подаются импульсы сдвига на соответствующие регистры.
Таким образом, с помощью вычислителя модуля получают код огибающей входных сигналов для сокращения аппаратурных затрат в РЛС, имеющей квадратурные каналы.
Цифровые накопители. Основными элементами цифрового накопителя (рис.5.14), включаемого в каждый канал дальности, являются: М-разрядный, m-канальный сдвиговый регистр, выполняющий роль ЗУ сигналов пачки и накапливающий сумматор (рис.5.15), в цепь которого дополнительно включен сумматор 2. С выхода сдвигового регистра сигналы на вход сумматора 2 поступают в обратном коде с тем, чтобы обеспечить вычитание этих сигналов из сигналов, циркулирующих в накапливающем сумматоре.

Рис.5.14. Цифровой накопитель
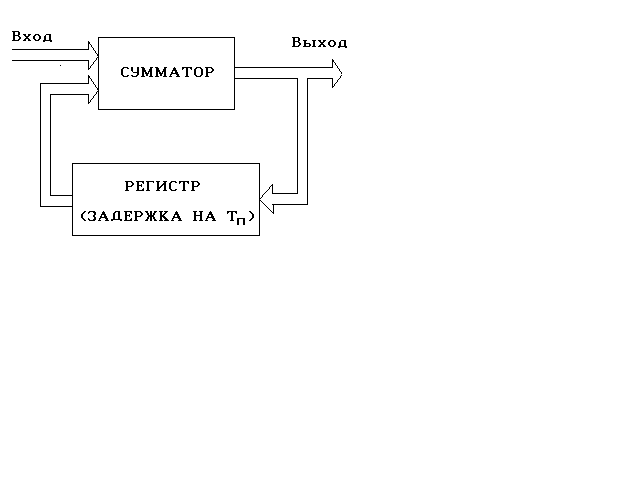
Рис.5.15. Накапливающий сумматор
Рассматриваемый накопитель в сочетании с цифровым компаратором по существу представляет собой обнаружитель типа движущегося окна, оперирующий с многоразрядными кодами сигналов. Сложность технической реализации (из-за наличия ЗУ достаточно большой емкости) при небольшом выигрыше в отношении сигнал/шум по сравнению с бинарным накопителем ограничивает использование этого накопителя лишь случаями, когда в РЛС так или иначе должно быть предусмотрено ЗУ входных сигналов соответствующей емкости (например, для обеспечения работы системы СДЦ). Значительно меньше аппаратурных затрат требует квазиоптимальный накопитель-цифровой рециркулятор (рис.5.16).

Рис.5.16. Цифровой рециркулятор
Он представляет собой накапливающий сумматор, в цепи обратной связи которого включен ослабитель с коэффициентом передачи
Β = 1 − 2-n, (5.8)
где n − натуральное число, определяемое для пачки с прямоугольной огибающей из условия | 1,26/M-2-n| = min. Выбор значения коэффициента обратной связи в соответствии с (5.8) не приводит к существенному увеличению потерь в рециркуляторе и вместе с тем позволяет избежать необходимости применения умножителя в цепи обратной связи рециркулятора. При таком значении b сигнал на выходе ослабителя представляется в виде
Uвых осл = Uвых рец − 2-n Uвых рец , (5.9)
Деление на 2-n осуществляется сдвигом кода делимого на n разрядов вправо. Поэтому операцию (5.9) можно выполнить с помощью сумматора, на один вход которого поступает код сигнала Uвых рец, а на второй − обратный код Uвых рец со сдвигом на n разрядов вправо (рис.5.17).
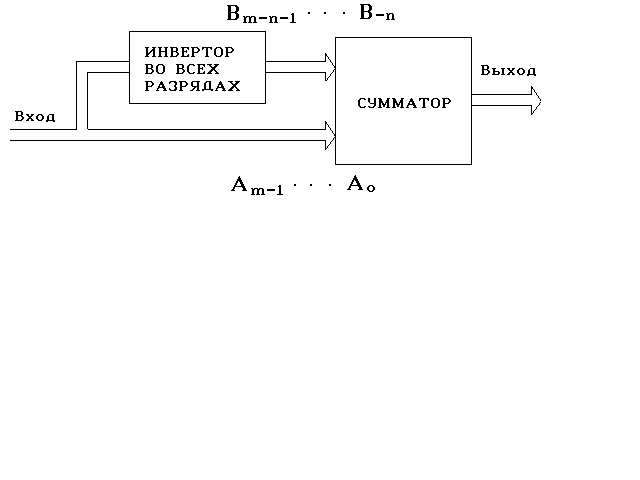
Рис.5.17. Ослабитель с коэффициентом передачи (1-2-n) на основе сумматора
Для исключения возможности перегрузки, рециркулятора (переполнения разрядной сетки) и обеспечения защиты от НИП входные сигналы рециркулятора должны подвергаться нормировке, например, с помощью цифровых схем ШАРУ с регулированием вперед.
Устройство стабилизации вероятности ложной тревоги. При многоуровневом квантовании для стабилизации Рлт обычно используют цифровую ШАРУ (рис.5.18) с регулированием вперед. Роль линии задержки с отводами через τи выполняют регистры, осуществляющие запоминание кодов сигналов в смежных участках дальности, число которых выбирается кратным двум (для упрощения технической реализации устройства нормировки).
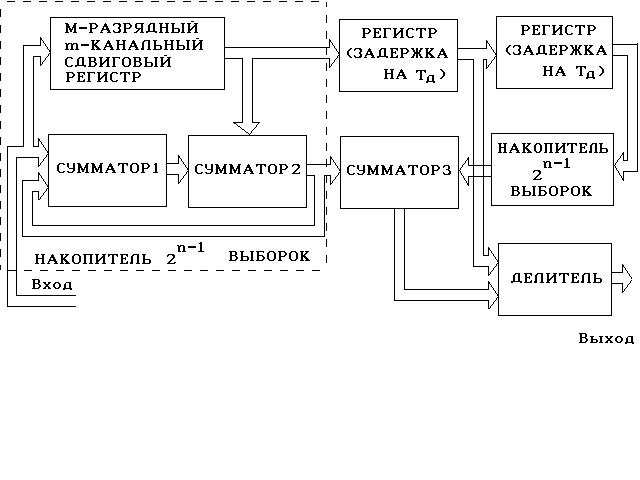
Рис.5.18. Цифровая ШАРУ
Основными элементами цифровой ШАРУ являются два накапливающих сумматора, осуществляющие накопление сигналов с 2n-1 элементов дальности каждый, и два регистра задержки на Тд, исключающие участие сигнала анализируемого канала дальности в оценке интенсивности мешающих шумов. Первый накапливающий сумматор суммирует сигналы с участков дальности предшествующих анализируемому, а второй − с последующих. Деление на 2n выходных сигналов сумматора 3 осуществляется путем сдвига кода на n разрядов вправо. Нормирующее устройство (делитель) выполняет операцию деления сигнала анализируемого участка дальности на оценку интенсивности шумов.