

4.11.2 Основные характеристики чпак
ЧПАК представляет собой систему СДЦ с адаптивным режекторным фильтром. Положение провалов в АЧХ ЧПАК автоматически изменяется таким образом, чтобы обеспечить режекцию спектральных составляющих сигналов ПП. Покажем это на примере одноканального ЧПАК, эквивалентная схема которого приведена на рис.4.67,а.

Рис.4.67. Упрощенная структурная схема и АЧХ одноканального ЧПАК
В соответствии с определением частотная характеристика определяется соотношением:
![]()
Для
данного устройства при
![]() :
:
![]() ,
тогда
,
тогда
![]() .
.
Коэффициент междупериодной корреляции сигналов ПП ρ(Тп) можно представить в виде
ρ(Тп) = R(Тп)·exp [j2π∙FДпп∙Tп],
где R(Тп) − модуль коэффициента корреляции сигналов ПП.
Тогда
![]()
Эта зависимость представлена на рис.4.67,б. Видно, что глубина провалов в АЧХ ЧПАК и положение их на частотной оси определяются модульным значением коэффициента межпериодной корреляции и доплеровской поправкой частоты сигналов ПП. При изменении FДпп изменяется и положение провалов на частотной оси, т.е. производится автоматическая адаптация режекторного фильтра.
Рассмотрим основные характеристики системы СДЦ.
Скоростная
характеристика
![]() −
это зависимость коэффициента передачи
полезного сигнала по мощности от
радиальной скорости цели (частоты
Доплера):
−
это зависимость коэффициента передачи
полезного сигнала по мощности от
радиальной скорости цели (частоты
Доплера):
Kср = PСвых/PСвх = f(Vr) = f(FД).
Скоростная характеристика ЧПАК определяется его канальностью, способом включения АК и линии задержки, а также параметрами ПП.
При однослойной ПП соотношение для коэффициентов передачи полезного сигнала имеют вид:
1) для одноканальной ЧПАК
Kср1(FД) = 1 + R2(Тп) − 2∙Тп∙cos 2π∙(FД − FДпп).
2) для двухканальной симметричной ЧПАК (рис.4.69)

Для схемы включения несимметричной двухканальной ЧПАК (рис.4.68), которая может быть получена из симметричной переключением места входа сигнала, выражение для KсрН(FД) более сложное.
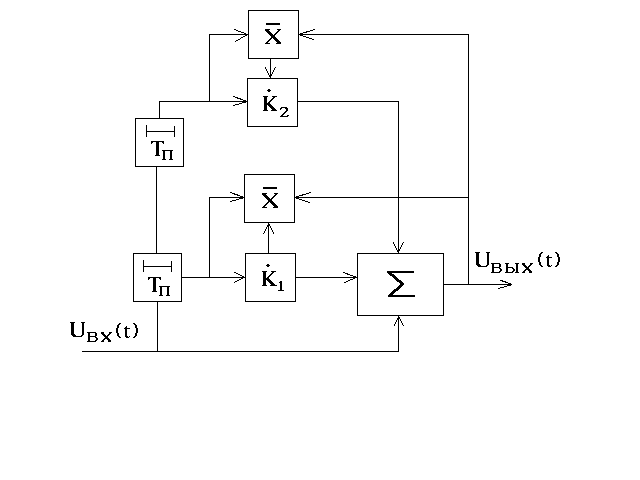
Рис.4.68. Несимметричная схема включения 2-х канального ЧПАК
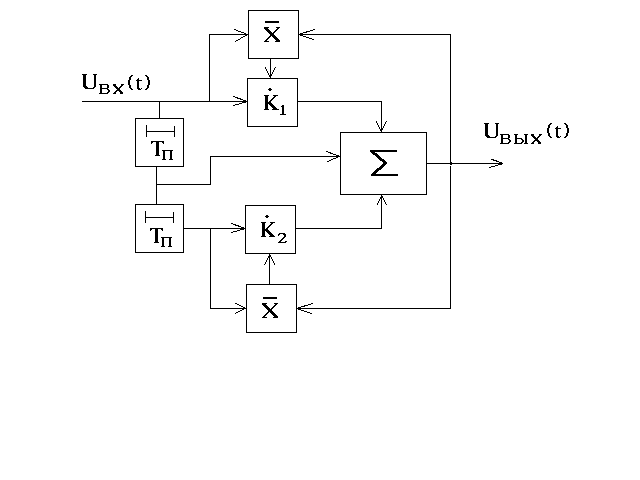
Рис.4.69. Симметричная схема включения 2-х канального ЧПАК
Среднее значение этих коэффициентов при R(Тп) ≈ 1 следующее: Kср1 ≈ 2; KсрС ≈ 1,5 KсрН ≈ 6.
Коэффициент улучшения отношения сигнал-помеха. Как известно, KУ = Kср KПП, т.е. для оценки коэффициента улучшения необходимо знать KПП. Методику оценки коэффициента подавления ПП KПП проиллюстрируем на примере одноканального ЧПАК. В таком ЧПАК мощность нескомпенсированных остатков ПП на выходе:
РППвых = |UП0 + K∙UП1|2 , (4.60)
где UП0, UП1 − комплексные огибающие сигналов ПП на входах АК, К − коэффициент передачи управляемого усилителя.
С учетом собственных шумов приемника:

где
![]() − коэффициент межпериодной корреляции
сигналов ПП;qп
= РПП/Рш
− отношение мощности ПП на входе ЧПАК
к мощности собственных помех приемника.
Считаем, что РППо
= РПП1
= РПП.
− коэффициент межпериодной корреляции
сигналов ПП;qп
= РПП/Рш
− отношение мощности ПП на входе ЧПАК
к мощности собственных помех приемника.
Считаем, что РППо
= РПП1
= РПП.
Подставляя значение К в (4.60), имеем:
РППвых = РППвх[1 − R2(Тп)∙(1 − 1/(1 + qп)2].
Поэтому
 (4.61)
(4.61)
Таким образом, в ЧПАК в отличие от систем СДЦ с ЧПВ, коэффициент подавления ПП зависит от уровня шумов в приемном канале. Поэтому при одновременном воздействии на РЛС АШП и пассивных помех коэффициент КПП будет снижаться. Для исключения влияния АШП ЧПАК необходимо включать после аппаратуры защиты РЛС от АШП.
При qп >>1, как следует из (4.61):
![]() (4.62)
(4.62)
тогда
![]()
При R(Тп) ≈ 1:
![]() (4.63)
(4.63)
т.е. одноканальный ЧПАК и СДЦ с однократным ЧПВ практически одинаково эффективны при условии, что в последней скомпенсирована скорость ветра.
Быстродействие ЧПАК. Быстродействие является важнейшей характеристикой адаптивной системы. В АК этот параметр однозначно определяется динамической постоянной Тдин компенсатора. Для одноканального АК
![]()
где Тст = 1/Пф − время интегрирования в разомкнутой цепи обратнойсвязи (статическая постоянная). Оно определяется полосой пропускания интегрирующего фильтра Пф на выходе перемножителя. Значение æ (каппа) − эквивалентная крутизна регулировочной характеристики (коэффициент передачи цепи обратной связи).
Для квадратурного АК:
æ = Кус1∙Кус2∙Кфд∙Кинт∙ Кбу.
Для исключения возможности самовозбуждения и потери полезного сигнала необходимо, чтобы Тдин(2-3)∙τи. При æ∙РПП = 100-1000 для выполнения этого условия
![]()
т.е. полоса пропускания интегрирующего фильтра должна быть в 300-3000 раз уже полосы СФ (УПЧ). Время восстановления АК (т.е. время возвращения в исходное состояние при исчезновении ПП) определяемое статической постоянной Тст и может составлять единицы и более милисекунд. Поэтому для исключения возможности снижения дальности действия РЛС на участках пространства, свободных от ПП, целесообразно предусматривать в РЛС коммутатор режимов работы.
Таким образом, ограниченное быстродействие АК приводит к появлению на выходе ЧПАК (и на экране индикатора соответственно) нескомпенсированных передних кромок ПП. Это обстоятельство существенно снижает возможности ЧПАК при наличии дипольных пассивных помех, если не принять соответствующие меры.
К достоинствам систем СДЦ на базе АК относятся следующие: автоматическая компенсация скорости ветра; возможность подавления многослойных пассивных помех (при соответствующей канальности АК);
снижение требований к стабильности частоты местного гетеродина и амплитуды зондирующего сигнала;
возможность применения в РЛС несимметричного запуска без снижения коэффициента подавления пассивных помех.
Недостатки систем с автокомпенсаторами: нескомпенсированная передняя кромка ПП; низкое качество компенсации разрывных (дискретных) ПП из-за ограниченного быстродействия.
Однако отмеченные недостатки могут быть в значительной степени устранены путем усложнения схемы автокомпенсаторов, используемых в системах СДЦ.