

Занятие 5
5.2 Принципы построения устройств преобразования радиолокационных сигналов в цифровую форму
Известно, что при цифровой обработке радиолокационных сигналов выборки сигнала, подлежащего обработке, преобразуются в цифровую форму − в числа, представленные в виде определенного кода. Чаще всего для этих целей используется двоичный код.
После преобразования аналог-код дальнейшая обработка сигналов (фильтрация и измерение координат) производится путем выполнения операций над числами с помощью цифровых устройств подобно тому, как это осуществляется в цифровой ЭВМ.
Система цифровой обработки по существу представляет собой комбинацию аналого-цифрового преобразователя (АЦП) со специализированной цифровой ЭВМ, выполняющей операции в реальном масштабе времени.
Устройства цифровой обработки, реализованные на базе современной дискретной микроэлектроники, имеют целый ряд преимуществ перед аналоговыми:
большой динамический диапазон;
возможность гибкой и оперативной перестройки параметров фильтров, обеспечивающей более высокую адаптивность РЛС;
высокую стабильность характеристик фильтра;
возможность длительного накопления слабых сигналов;
большую точность выполнения арифметических операций;
высокую надежность, малую массу и габариты;
возможность сопряжения систем обработки с цифровыми устройствами управления, что особенно важно в РЛС с ФАР.
Для реализации этих достоинств необходимо знать принципы построения основных устройств, используемых при цифровой обработке информации.
5.2.1 Устройства дискретизации аналоговых сигналов
Для обеспечения работы цифровых устройств обработки необходимо, как отмечалось выше, преобразовать аналоговый сигнал в цифровую форму. Эта процедура в большинстве случаев включает три самостоятельных операции: дискретизацию, квантование и кодирование.
Дискретизация аналогового сигнала U(t) состоит в измерении (отсчете) его значений в дискретные моменты времени, отстоящие друг от друга на интервал ТД, называемый периодом дискретизации. В результате сигнал U(t) преобразуется в последовательность значений {U(tп)} в моменты времени tп = nTД, n = 0, 1, 2...
Квантование − это преобразование аналоговых значений сигнала в дискретную форму Uкв(tп) путем дискретизации сигналов по амплитуде (по фазе).
После квантования сигнал кодируется. Чаще всего операции квантования и кодирования совмещаются и выполняются в АЦП.
Устройство дискретизации в простейшем случае представляет собой стробируемый каскад (ключ), открывающийся на время τд с периодом ТД, удовлетворяющим условию
![]() (5.1)
(5.1)
где fмакс − максимальная (граничная) частота в спектре входного сигнала.
Максимальный интервал временной дискретизации определяется в соответствии с теоремой Котельникова.
При внутрипериодной цифровой обработке (фильтрации) сигнала дискретизацию целесообразно выполнять на видеочастоте, искомый интервал должен быть обратнопропорционален ширине спектра модуляции зондирующего сигнала
![]()
Это условие выполняется при tд < ТД и его реализация в случае использования простейшего дискретизатора связана с необходимостью существенного увеличения быстродействия АЦП и широкополосности устройств формирования импульсов дискретизации.
Требование к быстродействию АЦП можно снизить, если между дискретизатором и АЦП включить устройство фиксации выходного напряжения ключа (например, конденсатор). Однако требование к широкополосности устройства формирования импульсов дискретизации сохраняется. Поэтому на практике в качестве дискретизатора чаще всего используется схема слежения и запоминание входных сигналов, показанная на рис.5.4.
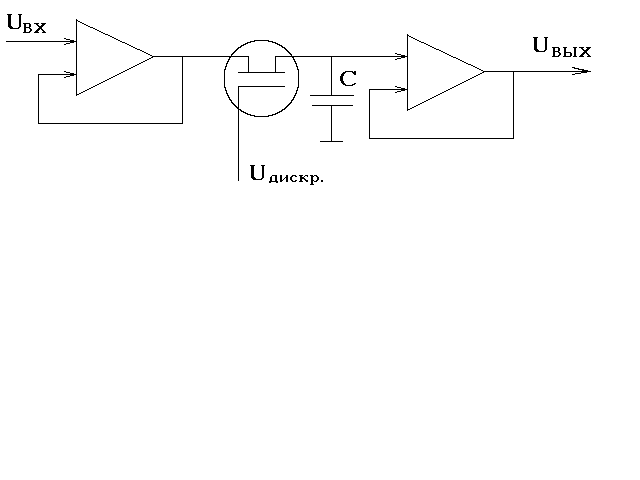
Рис.5.4. Схема слежения и запоминание входных сигналов
В этой схеме ключ, выполненный на МОП-транзисторе, подаются импульсы дискретизации (управления) с длительностью τд соизмеримой с ТД (обычно τд ≈ ТД/2). На конденсаторе С запоминается значение входного сигнала, соответствующее моменту окончания импульса управления, на время, равное ТД − τд.
Спектр дискретизированного сигнала является периодическим и представляет собой последовательность спектров входного сигнала, сдвинутых один относительно другого на величину FД = 1/ТД.
Если период дискретизации удовлетворяет условию теоремы Котельникова (см. формулу (5.1)), то спектры не перекрываются и могут быть разделены с помощью фильтров. Если же ТД > 1/ (2fмакс), то имеет место наложение спектров, что вызывает искажение сигналов. Для уменьшения этого эффекта перед дискретизатором устанавливается полосовой фильтр (или ФНЧ) с полосой пропускания Пф ≈ FД.
Период (частота) дискретизации является важнейшим параметром цифровых устройств обработки. Чем меньше ТД, тем меньше вероятность пропуска цели, но тем на большее число участков делится диапазон дальностей, что требует увеличение числа каналов обработки. Кроме того, при ТД < τи один и тот же сигнал попадает в два или более соседних канала дальности, что вызывает эффект «дробления» сигнала, связанный с появлением ложных целей.
Если же ТД > τи, то вероятность обнаружения целей уменьшается. Ухудшается также разрешающая способность по дальности и увеличивается ошибка измерения дальности.
Наиболее приемлемым считается значение ТД ≈ τи полезного сигнала (но несколько меньше).
Величину τд обычно выбирают так, чтобы за время τд изменение входного сигнала не превышало допустимой величины ΔU, т.е.
![]() (5.2)
(5.2)
Таким образом, принцип работы устройств дискретизации заключается в измерении (отсчете) значений аналогового сигнала U(t) в дискретные моменты времени, отстоящие друг от друга на интервал ТД, называемый периодом дискретизации. В простейшем случае такие устройства представляет собой стробируемый каскад (ключ), открывающийся на время τд с периодом ТД, удовлетворяющим условию ТД ≤ 1/(2fмакс). Максимальный интервал временной дискретизации определяется в соответствии с теоремой Котельникова и возможностью реализации таких устройств.