

6.4.2 Принципы построения систем формирования масштабных отметок азимута рлс ртв
Масштабные отметки азимута (МОА) на экране индикатора образуются путем подсвета развертки дальности на азимутах, кратных минимальной градации МОА ΔβМОА. В соответствии с этим МОА должны быть синхронизированы импульсом запуска РЛС и иметь длительность, равную длительности развертки по дальности tМОА = Тр. Получение различных градаций МОА с целью удобства отсчета азимута обеспечивается изменением амплитуды импульсов МОА.
В РЛС старого парка чаще всего используются электромеханический и электрический (на сельсинах) способы формирования МОА (рис.6.34).
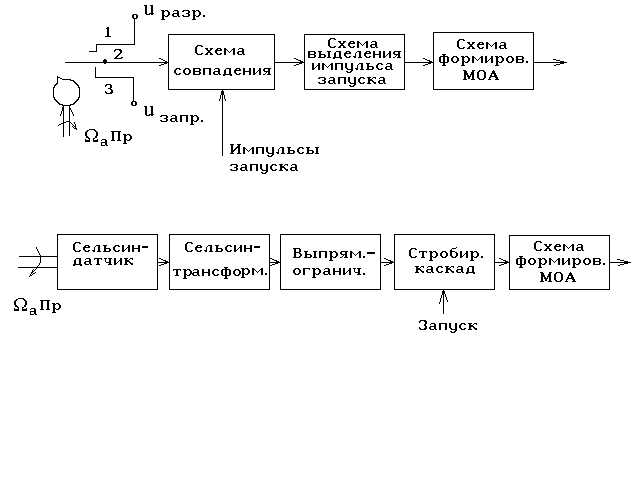
Рис.6.34. Устройство формирования МОА:
а) электромеханическое;
б) на сельсинах
При электромеханическом способе (рис.6.34,а) в качестве датчика МОА используется контактная группа, замыкающаяся с помощью кулачков, механически связанных с антенной. Число кулачков m и коэффициент редукции np определяют градацию МОА: ΔβМОА = 360°/mnp.
Устройство функционирует следующим образом. В исходном состоянии замкнуты контакты 2-3, на схему совпадения подается запрещающий потенциал. Импульсы запуска при этом не проходят на выход схемы. После набегания кулачка контакты 2-3 размыкаются, а контакты 1-2 замыкаются, на схему совпадения при этом подается разрешающий потенциал. Время замыкания контактов tк составляет десятки милисекунд, поэтому через схему совпадения могут пройти несколько импульсов запуска. Для формирования МОА только от первого импульса служит схема выделения импульса запуска, представляющая собой формирователь импульсов (обычно блокинг-генератор) со временем восстановления tвос > tк. Это исключает ее срабатывание от остальных импульсов запуска, прошедших схему совпадения. Выделенный импульс запуска поступает на схему формирования МОА, вырабатывающую импульс с длительностью, равной Тр.
Ошибки в устройстве возникают из-за несовпадения моментов замыкания контактов и прихода импульсов запуска, изменения момента замыкания контактов вследствие механических люфтов.
Поскольку моменты замыкания контактов и поступления импульсов запуска не синхронизированы, то интервал времени между ними Δt представляют собой случайную величину с равномерным законом распределения на интервале [–Tп/2; Tп/2]. При этом σΔt = Tп/2√3, а связанная с ней ошибка измерения азимута σβ = ΏаσΔt.
При скорости вращения Ώа = 360/с и Tп = 5 мс эта ошибка равна σβ = 3'. Вторая составляющая ошибки значительно больше и в основном определяет суммарную ошибку, которая может достигать значений 15'-20'. Поэтому этот способ формирования МОА используется в РЛС с малой точностью измерения азимута.
Лучшая точность обеспечивается при электрическом способе формирования МОА. В качестве датчиков МОА в этом случае используются сельсины или диски с магнитами.
В устройстве формирования МОА на сельсинах (рис.6.34,б) напряжение с выхода сельсин-трансформатора детектируется, усиливается, ограничивается по амплитуде и используется в качестве стробирующего напряжения. Импульсы запуска проходят через стробирующий каскад только тогда, когда это напряжение близко к нулю. При этом также возможно прохождение нескольких импульсов запуска, и режим работы последующих элементов выбирается так, чтобы МОА формировалась только от первого импульса запуска, т.е. также, как и в ранее рассмотренном случае.
Принцип работы магнитного датчика МОА (рис.6.35) основан на изменении сопротивления катушки индуктивности L переменному току при изменении сопротивления магнитопровода.
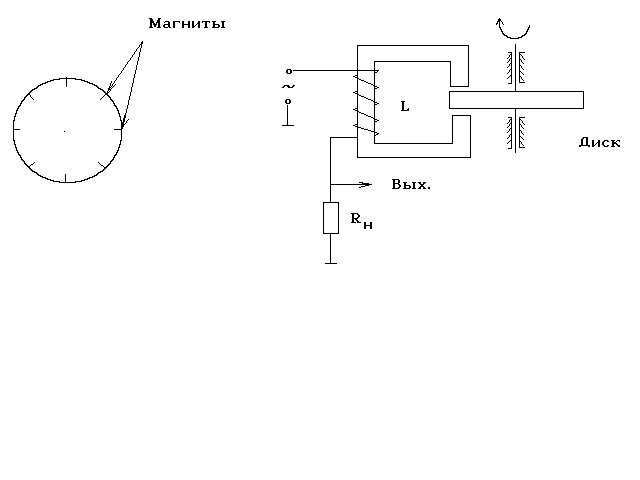
а) б)
Рис.6.35. Магнитный датчик МОА:
а) диск с магнитами;
б) схема датчика
Диск с нанесенными на него рисками из магнитного материала (рис.6.35,а) помещен в поле постоянного магнита и вращается синхронно с антенной. Когда какой-либо из магнитов диска попадает в область зазора, сопротивление магнитопровода, а следовательно и катушки L уменьшается и на нагрузке появляется выходной импульс.
Он далее детектируется и используется для формирования МОА, которое осуществляется так же, как и в схеме рис.6.34,а. Изменяя скорость вращения диска, коэффициент редукции и угловое расстояние между рисками, можно обеспечить любую градацию МОА. Средняя квадратическая ошибка при электрическом способе формирования МОА обусловлена в основном несовпадением моментов прихода импульсов запуска и сигналов с датчика МОА и составляет 3'-4'.
В РЛС с цифровой обработкой информации (55Ж6, 22Ж6М и др.) МОА формируются из масштабных азимутальных импульсов (МАИ), число которых достаточно велико (как правило NМАИ = 4096 = 212 за один оборот антенны). МАИ могут быть получены с помощью магнитного датчика, описанного выше, либо фотоэлектрическим методом, суть которого заключается в следующем.
Производится считывание с кодового диска 1 (рис.6.36), изготовленного из органического стекла и вращающегося с угловой скоростью антенны.
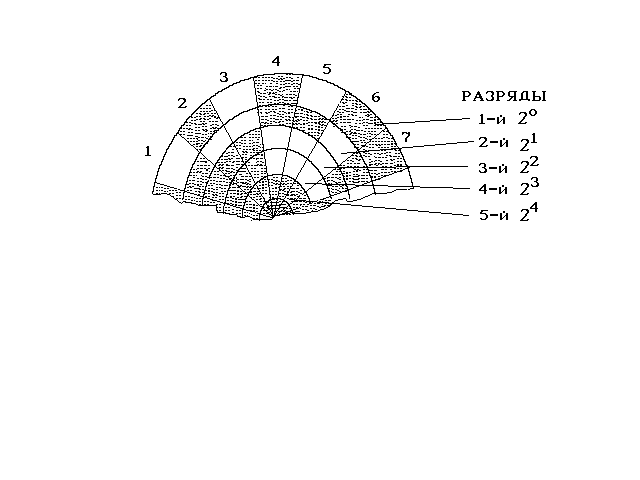
Рис.6.36. Кодовый диск
Допустим, что измерение азимута целей производится от 0 до 360о с интервалами в 15о. В этом случае кодовый диск делят на 24 сектора и каждому из них присваивают номер 1-24. Чтобы закодировать эти номера, диск разбивают на кольца по числу разрядов кода и фотоспособом наносят определенный двоичный код азимута (рис.6.37).
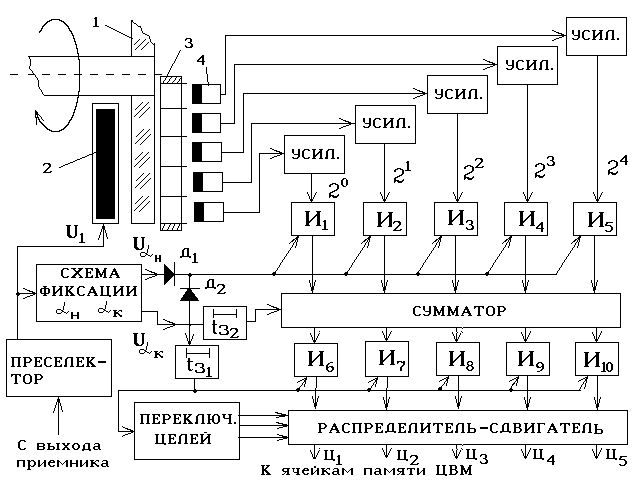
Рис.6.37. Функциональная схема автоматического измерения азимута
Импульсы цели U1 (рис.6.37) с выхода преселектора зажигают линейный источник света 2 и тем самым высвечивает радиальную линию на находящимся напротив него секторе диска, на котором закодирован данный азимут цели. Расположенный за диском экран 3 со щелями пропускает луч на те фотоэлементы, которые находятся против прозрачных элементов диска. С нагрузочных сопротивлений этих фотоэлементов снимаются и усиливаются электрические импульсы. Поскольку каждый усилитель соответствует определенному разряду числа (20, 21, 22,...), то совокупность выходных импульсов образует код текущего углового положения луча. Считывание кода производится с учетом того, что цель облучается пачкой импульсов и азимут цели равен:
β= (βн + βк)/2, (6.18)
где βн, βк – азимут начала и конца пачки соответственно, которые определяются с помощи схемы фиксации этих углов (рис.6.31).
Пачка импульсов цели U1 задерживается линией задержки на период повторения Тп. Задержанные U3 и незадержанные U1 импульсы подаются на входы схем «НЕ» («НЕ»1 – «НЕ»2), но по разному:
для схемы «НЕ»1 импульс U1 – основной и импульс U3 – запрещающий, для схемы «НЕ»2 – наоборот. При появлении первого импульса пачки запрещающего импульса еще нет на «НЕ»1 и на выходе этой схемы возникает импульс Uин ;
на выходе же «НЕ»2 фиксируется последний задержанный импульс Uик, т.к. в это время уже нет запрещающего импульса U1.
Полученные в схеме фиксации импульсы начала и конца пачки открывают через диоды Д1 и Д2 схемы «И»1 – «И»5, чтобы пропустить двоичные коды углов βн и βк в сумматор. Последний производит сложение: βн+ βк и делит эту сумму пополам.
Примерно на время этих операций tз1 задерживается в ЛЗ импульс Uик перед тем, как открыть схемы «И»6- «И»10, пропускающие вычисленные импульсы кода азимута в распределитель – сдвигатель.
Таким образом, системы формирования масштабных отметок азимута могут быть построены указанными выше способами и во многом определяют инструментальную точность измерения угловых координат.