

5.2.3 Аналого-цифровые преобразователи, их параметры и основные типы
К основным параметрам АЦП относятся:
динамический диапазон;
частота преобразования (дискретизации FД), период дискретизации ТД = 1/FД;
время преобразования;
разрешающая способность;
погрешность преобразования.
Динамический диапазон АЦП определяется отношением максимального сигнала к СКО шумов квантования
![]()
Из-за несовершенства отдельных элементов преобразователя, ухода параметров в зависимости от времени ,температуры, нестабильности источников питания и т.д. характеристики квантования реальных АЦП отличаются от идеальных, что является причиной появления дополнительных шумов. Так, если σдоп = σкв, то отношение сигнал/шум Uс/Uш на выходе реального АЦП уменьшается на 3 дБ.
При σдоп = σкв√2 потери составляют 6 дБ, что означает потерю младшего разряда. Поэтому, если дополнительные шумы имеют тот же порядок, что и шумы квантования, то увеличивать разрядность АЦП бессмысленно. Это обуславливает трудности создания многоразрядных АЦП, поскольку с уменьшением шумов квантования доля дополнительных шумов возрастает.
Частота преобразования (дискретизации) FД – это частота, с которой происходит образование выборочных значений сигнала. Она определяет требование к быстродействию АЦП и должна выбираться в соответствии с соображениями, рассмотренными в подразделе 5.2.1.
Время преобразования tпр – это время от начала импульса дискретизации (начала преобразования) до появления на выходе АЦП устойчивого кода, соответствующего выборке входного сигнала. При работе без устройств выборки и запоминания оно определяет достижимую частоту дискретизации FД.
Разрешаюшая способность – это способность АЦП различать два значения входного сигнала. Определяется количеством различных кодовых комбинаций на выходе АЦП и выражается либо в битах (число разрядов), либо как динамический диапазон в децибеллах.
Погрешность преобразования обусловлена эффектом квантования и отличием реальной характеристики квантования от идеальной. В качестве меры ее оценки может служить мощность шумов квантования реальных АЦП.
Таким образом, параметры АЦП взаимосвязаны друг с другом и являются результатом компромисса между различными противоречивыми требованиями: точностью и быстродействием, точностью и сложностью, быстродействием и стоимостью. Этим и объясняется и большое многообразие практических схем АЦП.
Типы АЦП. По способу преобразования выборочных значений сигнала в цифровой эквивалент все многообразие АЦП может быть сведены в три класса: последовательные; параллельные и последовательно-параллельные.
Принцип действия последовательных АЦП основан на процедуре последовательного приближения цифрового эквивалента к преобразуемой величине, которая может быть реализована с помощью единичных или двоично – взвешенных приближений (рис.5.6 и 5.7 соответственно).
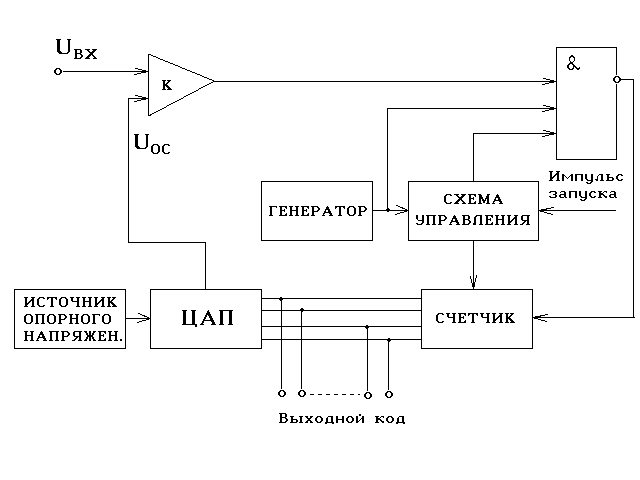
Рис.5.6. Последовательный АЦП с единичными приближениями
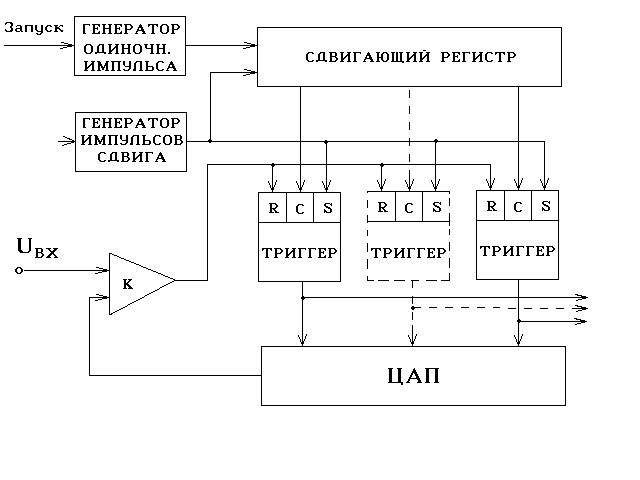
Рис.5.7. Последовательный АЦП с поразрядным кодированием
Время преобразования в такой АЦП является переменным и зависит от величины входного сигнала. Его максимальное значение
tпр.макс = (2m – 1)Tсч,
где Tсч – период следования счетных импульсов.
При большом числе разрядов быстродействие таких АЦП мало при m = 10 и Tсч = 1 мкс (1 МГц), tпр.= 1024 мкс, что обеспечивает максимальную частоту дискретизации FДмакс ≈ 1 кГц.
При использовании АЦП с двоично-взвешенным приближением (поразрядным кодированием) быстродействие может быть существенно повышено.
В основу его работы положен принцип последовательного сравнения измеренной величины с 1/2, 1/4, 1/8 и т.д. от возможного ее максимального значения (принцип дихотомии).
Выигрыш в быстродействии по сравнению с АЦП с единичным приближением равен примерно 2m/m и достигает при m ≥ 10 двух и более порядков. Частота дискретизации в АЦП с поразрядным кодированием составляет единицы мегагерц.
Принцип действия параллельных АЦП основан на одновременном квантовании сигнала с помощью набора компараторов. Число компараторов равно 2m – 1, где m – число разрядов, а пороговые уровни устанавливаются с помощью резистивного делителя, подключенного к источнику опорного напряжения, в соответствии с используемой шкалой квантования.
Структурная схема трехразрядного параллельного АЦП представлена на рис.5.8. При подаче входного сигнала срабатывают все те компараторы, у которых порог меньше, чем входной сигнал. Получающийся при этом унитарный код с помощью кодирующей логики преобразуется в двоичный.

Рис.5.8. Трехразрядный параллельный АЦП
Главным достоинством параллельных АЦП является их высокое быстродействие. Частота преобразования достигает 100-200 МГц. Однако их объем приблизительно удваивается с каждым новым разрядом. Поэтому разрядность таких АЦП не превышает 10-12.
Последовательно-параллельные АЦП занимают промежуточное положение среди рассмотренных выше типов АЦП. Они имеют существенно меньший объем в сравнении с параллельными АЦП и лучше быстродействие в сравнении с последовательными.