

3418
.pdfВ нижней части окна расположены следующие кнопки:  «Построить графики» – начало расчета
«Построить графики» – начало расчета
«Продолжить строить графики» – продолжение расчета
«Анимация» – компьютерная анимация движения
«Печать» – вывод графика на печать
«Сохранить график» – сохранение графика в виде файла формата *.dat «Закрыть» – прекращение работы
Рис. 6.9. Окно для вывода графиков
Рис. 6.10. Окно компьютерной анимации
31
Каждый из графиков содержит контекстное меню (видно в центре рис. 6.9), которое появляется при нажатии правой кнопки мыши, когда курсор находится на данном графике.
Кнопка «Анимация» вначале недоступна, компьютерная анимация движения (рис. 6.10) будет возможна после того, как надпись на кнопке станет отчетливой.
Элементы окон содержат подсказки. Для их появления задержите курсор, и через некоторое время появится ярлычок с текстом, содержащий пояснения о назначении данного элемента.
Порядок выполнения работы
1)После изучения теоретической части составить дифференциальное уравнение колебаний подпрыгивания экипажа с одноступенчатым рессорным подвешиванием.
2)Выбрать из табл. 6.1 значения параметров системы в соответствии с вариантом задания. Вычислить, согласно (6.9) значения k и 2b.
3)Ознакомиться с пакетом программ и произвести для своего варианта моделирование колебаний подпрыгивания, возникающих при скорости движения 20 м/с
вслучае, когда демпфирование отсутствует, то есть β = 0 и наиболее общий случай, когда система имеет демпфирование с β = 40000 Н/(м/с), h0 = 0,01 м.
4)Определить максимальные значения относительного перемещения тела и колеса (Δ = Z – Н) и ускорения тела (Ztt) для следующих скоростей движения экипажа: 10, 20, 30, 40, 50, 60 м/с и вычислить значения коэффициента динамики kдин (6.15) при гармонической неровности пути типа (6.5). Построить АЧХ.
5)Подобрать параметр демпфирования β таким образом, чтобы величины относительного перемещения тела и колеса и ускорения тела не превышали своих предельно допустимых значений – соответственно 0,13 м и 1 м/с2 – во всем диапазоне скоростей движения экипажа. Сравнить найденные значения коэффициентов демпфирования с приведенными в табл. 6.1.
6)Составить отчет о выполненных исследованиях, сформулировать выводы по работе.
Таблица 6.1
Варианты параметров системы
Вариант |
Масса |
Жесткость |
Параметр |
№ |
m, кг |
ж, |
демпфирования |
|
|
Н/м |
β, Н/(м/с) |
1 |
76·103 |
7·106 |
12·104 |
2 |
76·103 |
14·106 |
12·104 |
3 |
76·103 |
21·106 |
12·104 |
4 |
84·103 |
15·106 |
3·104 |
5 |
48·103 |
1·106 |
8·104 |
6 |
48·103 |
5·106 |
8·104 |
7 |
48·103 |
4,5·106 |
8·104 |
8 |
48·103 |
3·106 |
8·104 |
9 |
24·103 |
15·106 |
28·104 |
10 |
48·103 |
15·106 |
28·104 |
Вариант |
Масса |
Жесткость |
Параметр |
№ |
m, кг |
ж, |
демпфирования |
|
|
Н/м |
β, Н/(м/с) |
11 |
72·103 |
15·106 |
28·104 |
12 |
45·103 |
5·106 |
20·104 |
13 |
74·103 |
6·106 |
30·104 |
14 |
74·103 |
12·106 |
30·104 |
15 |
74·103 |
18·106 |
30·104 |
16 |
84·103 |
15·106 |
6·104 |
17 |
76·103 |
10·106 |
34·104 |
18 |
20·103 |
7·106 |
3,4·104 |
19 |
40·103 |
7·106 |
3,4·104 |
20 |
60·103 |
7·106 |
3,4·104 |
32
Содержание отчета
1)Цель работы.
2)Привести расчетную схему динамической модели исследований вынужденных вертикальных колебаний.
3)Вычисления коэффициента динамики kдин, зависимости АЧХ.
4)Выводы.
Контрольные вопросы
1)Что такое колебания подпрыгивания?
2)Чем характеризуются колебания подпрыгивания?
3)Какая модель используется для исследования колебаний подпрыгивания экипажа с одноступенчатым рессорным подвешиванием?
4)В чем особенности дифференциальных уравнений движения в форме уравнений Лагранжа 2-го рода для экипажа с одноступенчатым рессорным подвешиванием?
5)Охарактеризуйте общее уравнение динамики для экипажа с одноступенчатым рессорным подвешиванием.
6)В чем специфика амплитудно-частотных характеристик (АЧХ) для экипажа с одноступенчатым рессорным подвешиванием?
Лабораторная работа № 7
ИССЛЕДОВАНИЕ ВЛИЯНИЯ ПАРАМЕТРОВ ДВУХСТУПЕНЧАТОГО РЕССОРНОГО ПОДВЕШИВАНИЯ НА ВЕРТИКАЛЬНЫЕ КОЛЕБАНИЯ ТПС
Цель работы: освоить методику математического моделирования колебаний подпрыгивания экипажа с двухступенчатым рессорным подвешиванием.
Теоретические сведения
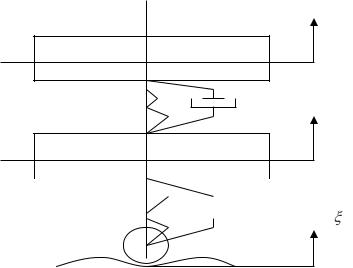
Лабораторная работа проводится на расчетной динамической модели с двумя степенями свободы (рис. 7.1). Рассматриваются вынужденные колебания подрессоренных частей тележки и части кузова, приходящейся на тележку, под действием кинематического возмущения со стороны пути.
Рассмотрим показанную на рис. 7.1 механическую систему, представляющую собой двухмассовую модель рельсового экипажа. Колесо движется по пути с неровностью h = h(x). Тело 1 (рама тележки) массой m1 через буксовую подвеску, состоящую из пружины жесткости с1 и гасителя колебаний с коэффициентом вязкого сопротивления 1 , опирается на колесо K, массой которого пренебрегаем. Тело 2 (кузов) массой m2 через кузовную подвеску, состоящую из пружины жесткости с2 и гасителя колебаний с коэффициентом сопротивления 2 , опирается на тело 1.
33
z2
m2
ж2 |
β2 |
|
z1
m1
ж1 |
|
|
|
|
|
|
β1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
Рис. 7.1. Расчетная схема: двухмассовая модель
Предполагаем, что по горизонтали система перемещается с постоянной скоростью v0. Требуется определить вертикальное движение тел 1 и 2.
Составление уравнений Лагранжа 2-го рода
Перейдем к выводу дифференциальных уравнений движения системы в форме уравнений Лагранжа 2-го рода.
На рис. 7.1 горизонтальными пунктирными линиями отмечены уровни, соответствующие положениям статического равновесия тел 1 и 2 в случае идеально ровного пути, то есть при h = 0. Ось Ох направим вправо вдоль линии, соответствующей положению равновесия тела 1, ось Оz – по вертикали вверх.
Положение тел 1 и 2 при вертикальных колебаниях определяется координатами z1 и z2 , которые выберем в качестве обобщенных координат. Рассматриваемая система имеет две степени свободы.
При вертикальных колебаниях оба тела совершают поступательное движение, выражение для кинетической энергии системы принимает вид:
|
T T T |
m z 2 m z |
2 / 2 |
. |
|
(7.1) |
|||||
|
|
1 |
2 |
1 |
1 |
2 |
2 |
|
|
||
|
|
|
|
|
|
||||||
Потенциальная энергия сил тяжести, действующих на тела 1 и 2, запишется как |
|
||||||||||
|
тяж |
тяж.1 тяж.2 |
m1 gz1 |
m2 gz2 . |
(7.2) |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Проекции сил тяжести P1 |
и P2 на ось Оz: |
|
|
|
|
|
|
|
|
||
P1z ( тяж.1 ) / z1 |
m1 g , |
P2z |
( тяж.2 ) / z2 |
m2 g . |
|
||||||
|
|
|
34 |
|
|
|
|
|
|
|
|

Потенциальная энергия сил упругости пружин имеет вид:
|
—•р |
|
—•р.1 |
|
—•р.2 |
ж ( l |
)2 / 2 ж |
( l |
)2 / 2 . |
(7.3) |
|
|
|
1 1 |
2 |
2 |
|
|
Длина пружины 1, установленной между колесом K и телом 1, равна
l1 (l1 )0 ст.1 z1 h(x ) ,
где (l1)0 – длина пружины 1 в недеформированном состоянии;
ст.1 |
(m1 |
m2 )g |
– статическая деформация пружины 1 (знак « » означает, что в |
|
ж1 |
||
|
|
|
положении равновесия пружина сжата); z1 – текущая координата тела 1;
h(x) – вертикальное перемещение нижнего конца пружины за счет движения по неровному пути.
Деформация пружины 1 находится как
l1 l1 (l1 )0 ст.1 z1 h(x ) .
Длина пружины 2, установленной между телами 1 и 2, равна
l2 (l2 )0 ст.2 z2 z1 ,
где (l2)0 – длина пружины 2 в недеформированном состоянии;
ст.2 m2 g – статическая деформация пружины 2;
ж2
z1 , z2 – текущие координаты тел 1 и 2. Деформация пружины 2 находится как
l2 l2 (l2 )0 ст.2 z2 z1 .
Подставляя l1 и |
l2 |
в (7.3), получаем |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
—•р |
ж ( |
ст.1 |
z h(x))2 / 2 ж |
( |
ст.2 |
z |
2 |
z )2 / 2 . |
(7.4) |
||||||||
|
1 |
|
1 |
|
|
|
2 |
|
|
|
|
1 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Проекция на ось Оz силы упругости F2 |
2-й пружины, действующей на тело 2, равна |
|||||||||||||||||
|
|
|
F2 z —•р.2 / z2 ж2 ( ст.2 z2 z1 ) . |
|
||||||||||||||
На тело 1 со |
стороны |
2-й |
пружины действует |
такая же по |
величине, но |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
противоположная по направлению сила |
F * = F |
, ее проекция на ось Оz равна |
||||||||||||||||
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
F * F |
ж |
( |
ст.2 |
z |
2 |
z ) . |
|
|
||||||
|
|
|
|
|
2 z |
2 z |
2 |
|
|
|
1 |
|
|
|
|
|||
|
|
|
|
|
|
|
35 |
|
|
|
|
|
|
|
|
|
|
|
Проекция на ось Оz силы упругости F1 1-й пружины, действующей на тело 1, равна
F1z упр.1 / z1 ж1 ( ст.1 z1 h(x)) .
Диссипативная функция Рэлея в данном случае имеет вид:
|
|
|
|
|
|
|
|
|
|
|
1 2 1 vz1 2 / 2 2 vz 2 2 / 2 , |
(7.5) |
где |
v |
|
z |
v |
|
z |
|
dh(x) |
v |
|
– разность скоростей верхней и нижней точек крепления |
|
z1 |
Kz |
|
0 |
|||||||||
|
|
1 |
|
1 |
|
dx |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
демпфера 1, установленного между телом 1 и колесом K, взятая в проекции на вертикальную ось;
vz 2 z2 z1 – разность скоростей верхней и нижней точек крепления демпфера 2, установленного между телами 1 и 2, в проекции на вертикальную ось.
После подстановки vz1 и vz 2 |
получаем выражение для Ф: |
|
|
||||||||
|
|
|
|
dh(x) |
|
|
2 |
|
2 |
|
|
1 2 |
1 |
z1 |
|
|
v0 |
|
/ 2 2 |
z2 z1 |
/ 2 . |
(7.6) |
|
dx |
|||||||||||
|
|
|
|
|
|
|
|
|
|
||
Проекция на ось Оz силы вязкого сопротивления R2 2-го демпфера, действующей на тело 2, равна
R2 z 2 2 (z2 z1 ) .z2
На тело 1 со стороны второго демпфера действует такая же по величине, но
противоположная по направлению сила |
* |
|
, ее проекция на ось Оz равна |
R2 |
= R2 |
R2*z R2 z 2 (z2
Проекция на ось Оz силы сопротивления R1 равна
z1 ) .
1-го демпфера, действующей на тело 1,
|
|
1 |
1 |
|
|
|
dh(x) |
|
|
R1z |
|
|
|
v0 |
. |
||||
z1 |
z1 |
|
|||||||
|
|
|
|
|
|
dx |
|
|
|
Используя выражения (7.1), (7.2), (7.4), (7.6), получаем уравнения Лагранжа 2-го рода для рассматриваемой системы:
m1 z1 (ж1 ж2 )z1 (1 |
2 )z1 ж2 z |
2 2 z |
2 ж1h(x) 1 |
dh(x) |
v0 |
, |
(7.7) |
|
|
|
|
|
|
|
|
|
|
|
|
dx |
|
|
|
|||
|
|
|
|
|
|
|
|
|
m2 z2 ж2 (z2 |
z1 ) 2 (z2 |
z1 ) . |
|
|
|
(7.8) |
||
|
36 |
|
|
|
|
|
|
|
Составление общего уравнения динамики
Ускорения тел 1 и 2 в проекции на вертикальную ось a1z z1 , a2z z2 , силы инерции
Fин.1z m1a1z m1 z1 , Fин.2 z m2 a2 z m2 z2 .
Выражения для проекций сил тяжести, упругости и вязкого сопротивления, действующих на тела, получены в предыдущем пункте.
Возможные перемещения тел 1 и 2 обозначим как z1 и z2 соответственно, тогда общее уравнение динамики примет вид:
(P F R F * R* ) z ( m z ) z (P F R ) z ( m z ) z 0 |
, |
||||||
1z 1z 1z 2 z 2 z 1 |
1 1 |
1 |
2 z 2 z |
2 z 2 |
2 2 2 |
||
|
|||||||
выделяя затем множители при z1 |
и z2 |
и приравнивая их к нулю, приходим к двум |
|||||
уравнениям, совпадающим с (7.7), (7.8). |
|
|
|
|
|
||
Матричная запись дифференциальных уравнений движения
Дифференциальные уравнения движения (7.7), (7.8) запишем в матричной форме:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
x |
|
Ax |
f (t) , |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z |
|
|
z |
|
|
|
|
z |
|
|
|
z |
T , |
|
|
|
|
|
|
|
|
|
(7.9) |
|||||||
|
|
|
|
x |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
0 |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
0 |
|
|
0 |
|
|
|
|||||||||||||
|
|
ж1 ж2 |
|
|
|
1 |
|
2 |
|
|
ж2 |
|
2 |
|
|
|
||||||||||||||||||||
|
|
|
m1 |
|
|
|
|
|
|
|
m1 |
|
|
|
|
|
|
m1 |
|
|
|
m1 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
(7.10) |
||||||||||||
|
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
0 |
|
|
1 |
|
|
|
|||||||||||||
|
|
|
ж2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
ж2 |
|
|
2 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
m |
2 |
|
|
|
|
|
|
|
|
|
m |
2 |
|
|
|
|
|
|
m |
2 |
m |
2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 T , |
|
|
|
|
|
|
|||||||
|
|
|
|
f (t) |
|
|
f2 (t) |
0 |
|
|
|
|
|
|
(7.11) |
|||||||||||||||||||||
здесь f2(t) дается выражением |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f2 (t) |
|
ж1 |
h(x) |
1 |
|
dh(x) |
v0 , |
|
|
|
x v0t . |
|
|
(7.12) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
m1 |
|
|
|
|
|
m1 |
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Построение амплитудно-частотной характеристики
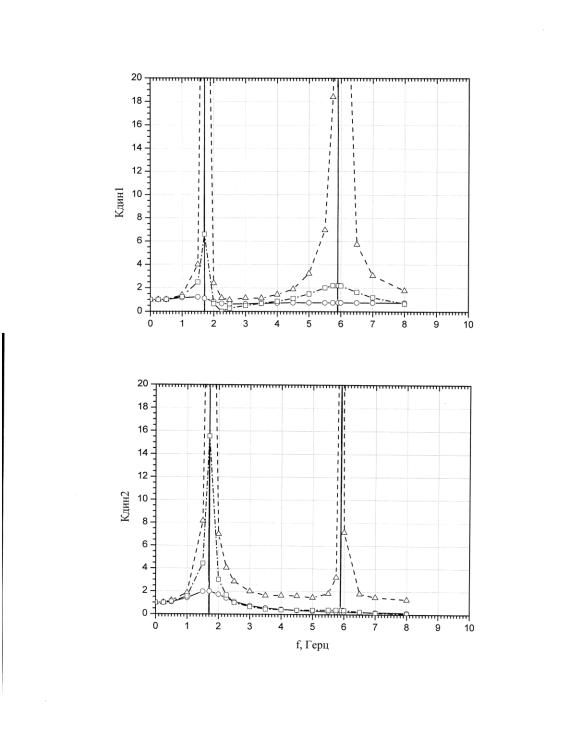
Поскольку экипаж с двухступенчатым рессорным подвешиванием имеет две собственные частоты (в нашем примере, при отсутствии демпфирования, они равны f1 = 1,71 Гц и f2 = 5,92 Гц), амплитудно-частотная характеристика рассматриваемой системы будет состоять из графиков коэффициентов динамики kдин1 и kдин2 (рис. 7.2).
37
Работа с учебным пакетом программ
После нажатия кнопки «Экипаж с двухступенчатым рессорным подвешиванием» (см. рис. 6.4, лаб. раб. № 6) на экране монитора появляется окно с изображением расчетной схемы
f1 |
f2 |
|
|
f1 |
f2 |
|
|
|
|
Рис. 7.2. Графики коэффициентов динамики для рамы тележки (а) и кузова (б)
Обозначения:
– случай 1 (демпфирование отсутствует);
□– β1= 1,5 105 Н/(м/с), β 2= 0,4 105 Н/(м/с);
○ – случай 2 (β 1 = 1,5 106 Н/(м/с), β 2 = 0,4 106 Н/(м/с) )
Окно выбора отображаемых графиков (рис. 7.4) содержит группу независимых переключателей для выбора графической информации, предназначенной для вывода на экран. Сюда входят графики зависимостей координат, скоростей, ускорений, неровностей
38
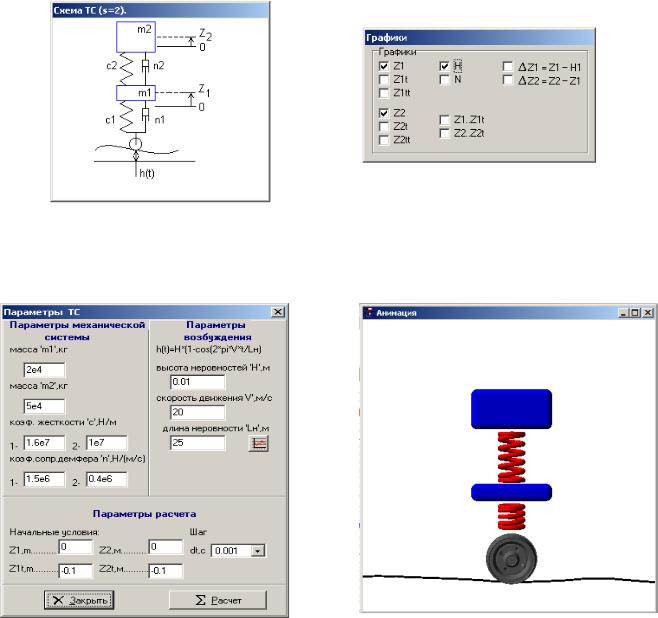
пути и динамических реакций от времени, а также фазовые портреты. Приняты следующие обозначения:
Z1, Z1t , Z1tt – координата, скорость и ускорение тела 1 (рамы тележки) по вертикали; Z2, Z2t , Z2tt – координата, скорость и ускорение тела 2 (кузова) по вертикали;
Н – неровность пути;
N – динамическая реакция пути;
Z1..Z1t и Z2..Z2t – фазовые портреты колебаний подпрыгивания тел 1 и 2; Z1 = Z1 – Н – относительное перемещение тела 1 и колеса;
Z2 = Z2 – Z1 – относительное перемещение тел 2 и 1.
Рис. 7.3. Окно с изображением расчетной |
Рис. 7.4. Окно выбора отображаемых |
схемы |
графиков |
Рис. 7.5. Окно для ввода численных |
Рис. 7.6. Окно компьютерной анимации |
значений параметров расчетной схемы |
|
Существует ограничение – нельзя выводить одновременно больше четырех графиков.
39
Окно для ввода численных значений параметров расчетной схемы транспортного средства показано на рис. 7.5. Необходимо задать численные значения параметров механической системы: массы тел, коэффициенты жесткости пружин и коэффициенты сопротивления демпферов, а также скорость движения транспортного средства.
Неровность пути может быть принята либо в виде гармонической функции согласно (6.5), что требует ввода значений высоты и длины неровностей, либо в виде профиля,
полученного путем путеизмерений, для чего необходимо нажать кнопку  . После нажатия этой кнопки появляется окно, при помощи которого выбирается профиль пути
. После нажатия этой кнопки появляется окно, при помощи которого выбирается профиль пути
(рис. 6.8).
Должны быть заданы также начальные условия и шаг расчета. Установив необходимые значения всех параметров и выбрав графики, путем нажатия кнопки «Σ Расчет» открываем окно для вывода графиков.
В нижней части этого окна расположены кнопки управления. Кнопка «Анимация» вначале недоступна, компьютерная анимация движения (рис. 7.6) будет возможна только после того, как надпись на кнопке станет отчетливой.
Порядок выполнения работы
1)После изучения теоретической части, составить дифференциальные уравнения колебаний подпрыгивания экипажа с двухступенчатым рессорным подвешиванием.
2)Выбрать из табл. 7.1 значения параметров системы в соответствии с вариантом задания.
3)Ознакомиться с пакетом программ и произвести для своего варианта моделирование движения экипажа при скорости 20 м/с для случая, когда путь горизонтальный и идеально ровный, т. е. h(x) = 0 и когда система, имеющая демпфирование, движется по пути с неровностью h0 = 0,01 м.
4)Определить максимальные значения относительных перемещений тела 1 и колеса (ΔZ1 = Z1 – Н), тел 2 и 1 (ΔZ2 = Z2 – Z1) и ускорений тел 1 и 2 (Z1tt и Z2tt) для следующих скоростей движения экипажа: 10, 20, 30, 40, 50, 60 м/с. Рассмотреть несколько вариантов демпфирования: а) отсутствие гасителей колебаний; б) гашение колебаний только центральной ступени подвешивания; в) гашение колебаний только буксовой ступени подвешивания; г) наличие гасителей колебаний в обеих ступенях подвешивания с параметрами согласно варианта задания.
5)Вычислить для последнего случая значения коэффициентов вертикальной динамики рамы тележки kдин1 и кузова kдин1. Построить АЧХ.
6)Подобрать такие значения коэффициентов демпфирования обеих ступеней рессорного подвешивания, при которых коэффициенты вертикальной динамики тележки
икузова не превышают допустимого значения, равного 1,3. Сравнить полученные оптимальные значения параметров демпфирования с исходными.
40