

3418
.pdf(m1 m2 )q1 m2 q2 F1 (t) F2 (t),
m2 q1 m2 q2 ж(q2 l0 ) q2 F2 (t).
Начальные условия движения в декартовых и обобщенных записываются следующим образом:
(9.7)
координатах
|
x |
x , |
x v |
, |
|
|
||
|
|
|
|
|
|
|
|
|
|
1 |
10 |
1 |
10 |
|
|
|
|
при t = 0, |
x2 x20 , |
x2 v20 , |
|
|
||||
|
|
|
|
|
|
|
|
|
|
q q x , |
q q |
v , |
|
||||
|
|
|
|
|
|
|
|
(9.8) |
|
1 |
10 |
10 |
1 |
10 |
10 |
||
|
q2 q20 x20 x10 , |
q2 q20 v20 v10. |
|
|||||
Интегрируя дифференциальные уравнения движения (9.7) с учетом начальных условий (9.8), можно получить искомые зависимости q1(t) и q2(t). Однако в данной задаче целесообразно поступить иначе: сначала определить движение центра масс системы, а затем изучить колебания тел 1 и 2 в подвижных осях, связанных с центром масс, то есть разбить абсолютное движение на переносное и относительное, что и будет сделано далее.
Составление общего уравнения динамики
Для получения дифференциальных уравнений движения системы «локомотив – состав» можно воспользоваться общим уравнением динамики, которое в данном случае запишется в виде
2 |
|
|
|
W 0 , |
(9.9) |
Fi |
mi ri |
ri |
|||
|
|
|
|
|
|
i 1
где W – возможная работа внутренних сил системы, т.е. сил упругости и сил вязкого
сопротивления, – возможные перемещения тел системы, которые представим в виде: ri
|
|
|
|
|
|
|
|
|
|
|
r1 q1e1 , |
r2 |
( q1 q2 )e1 . |
|
|
(9.10) |
|||
Силы инерции запишутся как |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(q1 |
|
(9.11) |
Fин.1 |
m1r1 |
m1q1e1 , Fин.2 |
m1r2 m1 |
q2 )e1 . |
|||||
|
|
|
|
|
|
|
|
|
|
Силы упругости и диссипативные силы, приложенные к телам 1 и 2, выражаются |
|||||||||
следующим образом: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Fупр.2 ж(q2 |
l0 )e1 , |
Fупр.1 |
Fупр.2 , |
|
(9.12) |
|||
|
|
|
|
|
|
|
|
|
|
R2 q2e1 , |
|
|
|
R1 R2 . |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя выражения для активных сил |
F1, |
F2 , сил инерции, |
внутренних сил и |
||||||
возможных перемещений в (9.9), получаем:
51
F1 q1 m1q1 q1 F2 ( q1 q2 ) m2 (q1 q2 )( q1 q2 ) ж(q2 l0 ) q2 q2 q2 =0,
выделяя затем множители при q1 и q2 и приравнивая их к нулю, приходим к двум уравнениям, совпадающим с (9.7).
Движение центра масс системы
Положение центра масс системы Ц задается его радиус-вектором:
|
|
|
|
|
|
|
|
|
m2 ) . |
|
|
|
rЦ |
(m1r1 |
m2r1 ) /(m1 |
|
|
||||||||
С учетом (9.1) получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m2 |
|
|
|
|
|
|
|
rЦ |
|
|
|
|
|
|
|
|
|
|
(9.13) |
|
|
|
|
|
|
|
|
|
||||
|
q1 |
|
m1 m2 |
|
q2 e1 . |
|
||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
Осуществим переход от координат q1, q2 |
к координатам qЦ, q2. Полагая rЦ |
qЦe1 |
, имеем |
|||||||||
выражение для обобщенной координаты qЦ центра масс системы: |
|
|
||||||||||
|
qЦ |
q1 |
|
|
m2 |
|
q2 . |
|
(9.14) |
|||
|
m1 |
m2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
||||
Видим, что с учетом (9.14) первое из уравнений (9.7) дает дифференциальное уравнение движения центра масс системы «локомотив – состав»:
|
(m1 |
m2 )qЦ F1 F2 . |
|
(9.15) |
||||||
|
|
|
|
|
|
|
|
|
|
|
Начальные условия имеют вид: |
|
|
|
|
|
|
|
|
|
|
при t = t0 |
q… |
q…0 |
q10 |
|
|
|
m2 |
q20 , |
(9.16) |
|
|
m1 |
m2 |
||||||||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
m2 |
|
|
|
|
|
|
|
|
|
|
|||||
|
qЦ |
qЦ0 |
q10 |
m1 |
m2 |
q20 . |
|
|||
|
|
|
|
|
|
|
||||
Относительное движение тел системы
После рассмотрения движения центра масс системы перейдем к изучению
относительного движения тел 1 и 2. Выражая q1 |
из первого уравнения (9.7) и подставляя |
|||||||||
во второе, получим: |
2bq2 |
k |
|
(q2 |
l0 ) f2 (t) , |
(9.17) |
||||
q2 |
2 |
|||||||||
|
|
|
|
|
|
|
|
|
||
где |
|
|
|
|
|
|
|
|
|
|
k 2 |
æ |
m1 m2 |
, 2b |
m1 m2 |
, |
(9.18) |
||||
|
||||||||||
|
|
|
|
|
||||||
|
|
|
m1m2 |
|
m1m2 |
|
||||
|
|
|
52 |
|
|
|
|
|
|
|
f2 (t) |
|
F1 (t) |
|
F2 (t) |
. |
|
|
(9.19) |
|
|
|
|
|
|
|||||
|
|
|
m1 |
m2 |
|
|
|
||
Обозначим деформацию пружины в текущий момент как = |
l |
= q2 l0, |
тогда |
||||||
уравнение (9.17) примет вид: |
|
|
|
|
|
|
|
|
|
2b k f2 (t) , |
|
|
(9.20) |
||||||
|
|
2 |
|
|
|
|
|
|
|
оно представляет собой дифференциальное уравнение вынужденных колебаний тел 1 и 2 относительно центра масс системы.
Начальные условия для (9.20) имеют вид:
при t = t0 |
= 0 = q20 l0, |
|
0 |
q20 . |
(9.21) |
|
|
|
|
|
|
Матричная запись дифференциальных уравнений движения
Дифференциальное уравнение движения центра масс (9.15) представим в виде:
qЦ |
0 |
1 qЦ |
|
0 |
|
|
|
|
|
|
|
|
|
. |
(9.22) |
|
|
|
F2 ) /(m1 |
||||
vЦ |
0 |
0 vЦ |
(F1 |
m2 ) |
|
||
Для дифференциального уравнения относительных колебаний (9.20), совпадающего по форме с (7.11), матричное представление определяется следующим выражением:
|
|
|
0 |
|
1 |
|
0 |
|
|
|
|
|
|
|
|
, |
|
|
|
|
2 |
|
|
|||
vотн |
k |
|
2b vотн |
f |
2 (t) |
|||
где f2(t) дается формулой (9.19), скорость относительного движения vотн .
Для сил F1, F2 в программе предусмотрены следующие выражения:
F1 = a1 + a2t + a3sin(a4 t), F2 = b1 + b2t + b3sin(b4 t).
Работа с учебным пакетом программ
(9.23)
(9.24)
После нажатия кнопки Система «локомотив–состав» (см. рис. 6.4) на экране монитора появляется окно с изображением расчетной схемы транспортного средства (рис. 9.2).
53
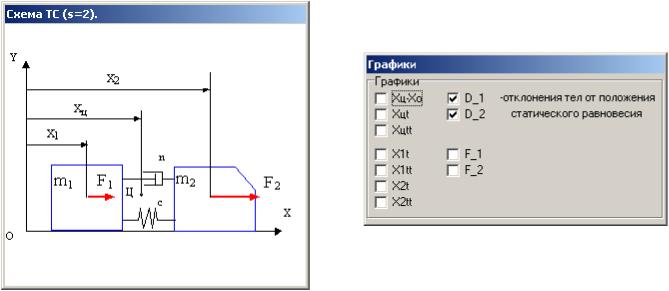
Рис. 9.2. Окно с изображением расчетной |
Рис. 9.3. Окно выбора отображаемых |
схемы |
графиков |
Окно выбора отображаемых графиков (рис. 9.3) содержит группу независимых переключателей для выбора графической информации, предназначенной для вывода на экран. Сюда входят графики зависимостей координат, скоростей, ускорений и действующих сил от времени. Приняты следующие обозначения:
Хц – Хо, Хцt, Хцtt – перемещение, скорость и ускорение центра масс системы «локомотив–состав» по горизонтали;
Х1t , Х1tt – скорость и ускорение тела 1 (состав) по горизонтали;
Х2t , Х2tt – скорость и ускорение тела 2 (локомотив) по горизонтали; D1, D2 – отклонение тел 1 и 2 от положения статического равновесия; F1, F2 – силы, приложенные к телам 1 и 2.
Существует ограничение – нельзя выводить одновременно больше четырех графиков. Окно для ввода численных значений параметров расчетной схемы транспортного средства показано на рис. 9.4. Необходимо задать численные значения параметров механической системы: массы тел, коэффициент жесткости упругого элемента и коэффициент сопротивления демпфера, а также задать значения параметров в выражениях
для сил F1, F2. Для сил F1, F2 в программе предусмотрены следующие выражения:
F1 = a1 + a2t + a3sin(a4 t), |
F2 = b1 + b2t + b3sin(b4 t). |
(9.24) |
Должны быть заданы также начальные условия и шаг расчета. Установив необходимые значения всех параметров и выбрав графики, путем нажатия кнопки «Σ Расчет» открываем окно для вывода графиков.
В нижней части этого окна расположены кнопки управления. Кнопка «Анимация» вначале недоступна, компьютерная анимация движения (рисунок 9.5) будет возможна только после того, как надпись на кнопке станет отчетливой.
54
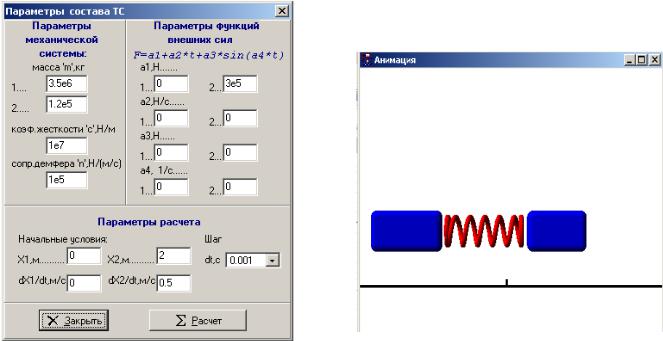
Рис. 9.4. Окно для ввода численных значений |
Рис. 9.5. Окно компьютерной анимации |
параметров расчетной схемы |
|
Порядок выполнения работы
1)После изучения теоретической части составить дифференциальные уравнения продольных колебаний двухмассовой системы «локомотив–состав».
2)Ознакомиться с пакетом программ и произвести моделирование движения.
3)Значения параметров системы и вид функций F1, F2 в соответствии с вариантом задания получить у преподавателя.
4)Построить графики движения центра масс связки «локомотив–состав», а также относительных колебаний тел 1 и 2.
5)Проанализировать полученные результаты. Составить отчет о выполненных исследованиях, сформулировать выводы по работе.
Контрольные вопросы
1)Что такое продольное колебание?
2)Чем характеризуются продольные колебания?
3)Какими элементами представлена двухмассовая система «локомотив–состав»? Каковы их основные характеристики?
4)В чем особенности дифференциальных уравнений движения в форме уравнений Лагранжа 2-го рода для двухмассовой системы «локомотив–состав»?
5)Охарактеризуйте общее уравнение динамики для двухмассовой системы «локомотив–состав».
6)Чем определяется движение центра масс системы «локомотив–состав»?
7)Что характеризует относительное движение тел системы «локомотив–состав»?
8)Как выполнять построение матриц дифференциальных уравнений движения для двухосной тележки?
55
БИБЛИОГРАФИЧЕСКИЙ СПИСОК
1.Гарг В.К. Динамика подвижного состава / В.К. Гарг, Р.В. Дуккипати; пер. с англ.; под ред. Н.А. Панькина. – М.: Транспорт, 1988. – 391 с.
2.Механическая часть тягового подвижного состава / под ред. д.т.н., проф. И.В. Бирюкова. – М.: Транспорт, 1992. – 440 с.
3.Медель В.Б. Подвижной состав электрических железных дорог. Конструкция и динамика / В.Б. Медель. – М.: Транспорт, 1974. – 232 с.
4.Хусидов В.В. Динамика пассажирского вагона и пути модернизации тележки КВЗ-ЦНИИ / В.В. Хусидов, А.А. Хохлов, Г.И. Петров, В.Д. Хусидов; под ред. А.А. Хохлова. – М.: МИИТ, 2001. – 160 с.
5.Вериго М.Ф. Взаимодействие пути и подвижного состава / М.Ф. Вериго, А.Я. Коган ; под ред. М.Ф. Вериго. – М. : Транспорт, 1986.
6. Вершинский С.В. Динамика вагона : учеб. для вузов ж.-д. трансп. / С.В. Вершинский, В.Н. Данилов, В.Д. Хусидов ; под ред. С.В. Вершинского. – 3-е изд., перераб. и доп. – М. : Транспорт, 1991. – 360 с.
7.Сакало В.И. Контактные задачи железнодорожного транспорта / В.И. Сакало, В.С. Косов. – М. : Машиностроение, 2004. – 496 с.
8.Трофимович В.В. Определение сил взаимодействия колес электровозов ЭП1 с рельсами при движении в переходных и круговых кривых малого радиуса : учеб. пособие
/В.В. Трофимович. – Хабаровск : Изд-во ДВГУПС, 2004.
9.Трофимович В.В. Динамика электроподвижного состава : учебное пособие. – Хабаровск : Изд-во ДВГУПС, 2007. – 120 с.
10.Моделирование электромеханической системы электровоза с асинхронным тяговым приводом / Ю.А. Бахвалов, А.А. Зарифьян, В.Н. Кашников, П.Г. Колпахчьян, Е.М. Плохов, В.П. Янов; под редакцией Е.М. Плохова. – М.: Транспорт, 2001.
11.Оганьян Э.С. Расчеты и испытания на прочность несущих конструкций локомотивов: учеб. пособие / Э.С. Оганьян, Г.М. Волохов. – М.: ФГОУ «Учебнометодический центр по образованию на железнодорожном транспорте», 2013. – 326 с.
12.Исследование динамики вагонного колеса, имеющего ползун на поверхности катания : монография / Л. В. Кудюров, Д. С. Гарипов ; М-во трансп. РФ, ФАЖТ. – Самара :
СамГУПС, 2013. – 140 с.
13.Динамика сложных механических систем / А. А. Хохлов. – М. : МИИТ, 2002. –
172 с.
14.Механика и трибология движения колесной пары в рельсовой колее: монография / Г. С. Гура. – М.: УМЦ по образованию на железнодорожном транспорте, 2013. – 528 с.
15. Параметрическая устойчивость движения. Влияние износа ходовых частей подвижного состава: монография / В. П. Червинский. – Германия : LAP LAMBERT
Academic Publishing, 2013. – 245 с.
56